
3/6-SPS并联机构刚度和弹性变形的解析法分析*
2014-04-02 03:54叶勇,康亮
机械研究与应用 2014年4期
叶 勇,康 亮
(重庆电子工程职业学院机电学院,重庆 401331)
0 引言
并联机构刚度是机构平台在外力作用下,由于弹性元件的变形引起的位移大小的度量,反应了机构抵御变形的能力,刚度性能不仅对机构的动态特性有影响,而且决定了负载作用下机构的定位精度,更高的刚度允许更高的加工速度[1]。因此在初始设计阶段,分析并联机构的刚度和弹性变形很重要[2-3]。
对于少自由度并联机构的刚度,许多学者也做了研究。JOSHI等[4]分析和比较了Tricept机构和3-UPU机构的刚度模型。
HUANG等[5]对一种tripod-based并联机构进行了刚度分析。
LI[6]等分析了3-PUU机构的刚度。
韩书葵等[7]用螺旋理论建立了一种新型4自由度并联机构的刚度模型。
张勇等[8]建立3自由度可约移动并联机构3-PPRR的刚度模型。
李剑锋等[9]对具有大位置空间的2PUS-PU3自由度并联机构刚度进行了分析。
笔者以3/6-SPS并联机构为研究对象,通过解析方法研究分支刚度伴随矩阵和弹性变形,从而求解机构总的刚度矩阵和弹性变形,并分析机构刚度和位姿、广义六维力之间的关系。
1 3/6-SPS并联机构刚度和弹性变形
1.1 3/6-SPS并联机构及其受力情况
图1所示为3/6-SPS并联机构简图及其受力情况图。
由文献[4]中并联机构中的约束力位置和方向的约束情况可知3/6-SPS并联机构中既不存在约束力,也无约束力矩。3/6-SPS并联机构由动平台m、静平台B以及6个SPS分支构成,每个分支通过两个球副S连接与m和B,分支上有能够使驱动分支伸长或缩短的驱动副-移动副P副,其结构简图和受力情况如图1所示。整个工作载荷被简化为作用在动平台m的,上的广义六维力(F,T),(F,T)平衡于机构本身产生的6个驱动力力Fai(i=1,2,3…6)。驱动力Fai沿着ri作用在ri上的Bi上。设{B}为静平台B中心点O处的坐标系O-XYZ。
基于虚功原理,从参考文献[5]中导出3/6-SPS的静力学方程为:

式中:J是一个 6×6 的雅克比矩阵,δi(i=1,2,3…6)是驱动力方向的单位矢量,方向沿ri,ei是从o到bi的矢量。
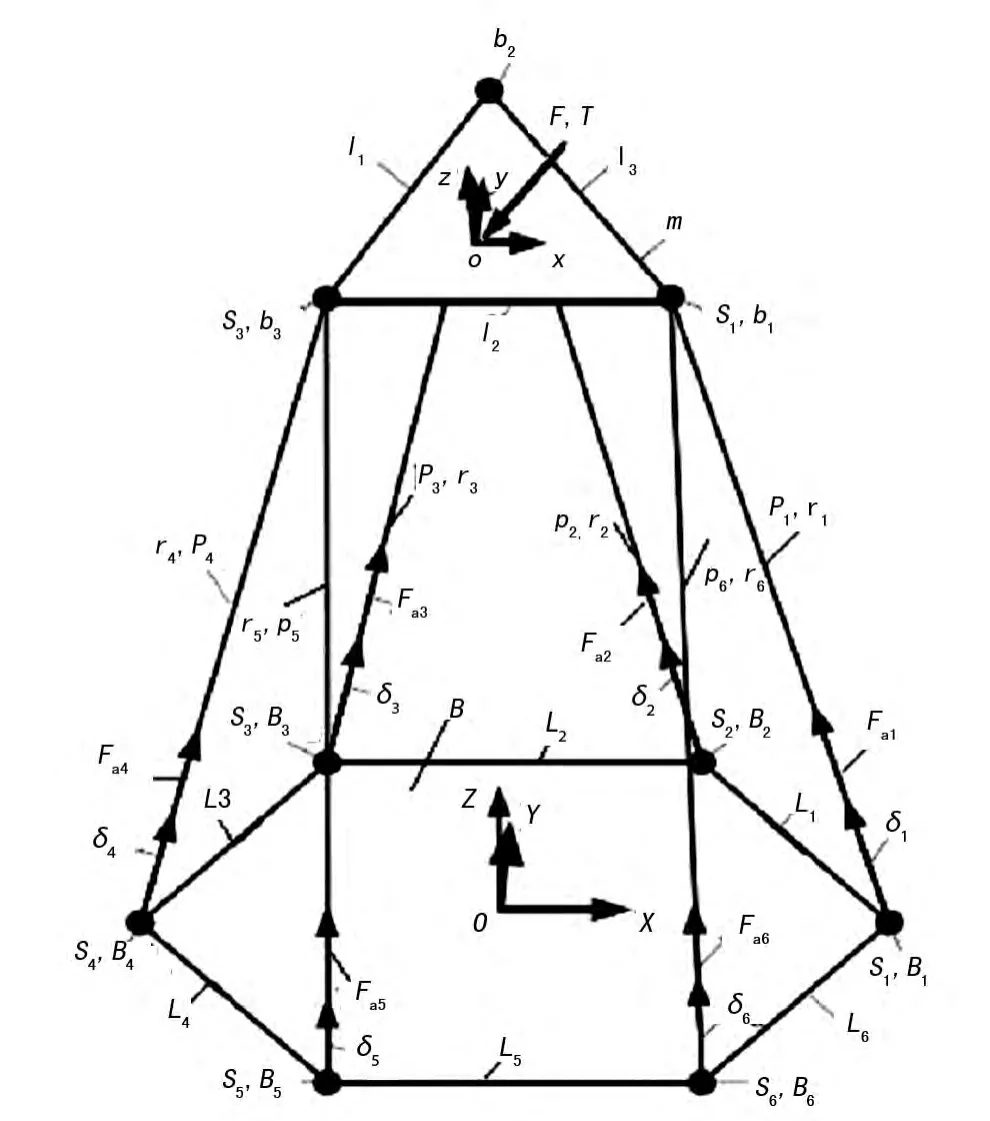
图1 3/6-SPS并联机构简图及其受力情况
1.2 3/6-SPS分支r i的伴随矩阵和弹性变形
为了便于计算先做如下假设:
(1)连续性假设:认为组成固体的物质毫无间隙地充满了固体的几何空间;
(2)均匀性假设:认为从构件内任取一部分,不论体积大小如何,其力学性能完全相同;
(3)各项同性假设:认为固体在各个方向上的力学性能完全相同;
(4)弹性小变形条件:固体因外力作用而引起的变形,限于变形的大小远远小于构件原始尺寸的情况,且在外力解除后又可恢复原状;
(5)不考虑各转动副处的变形和间隙;
(6)动平台比各链杆的尺寸大很多,其变形远远小于杆的变形,为计算动平台上中心点变形及协调关系,假定动平台为刚体。
并联机构中每个SPS分支只受轴向力作用而产生拉压弹性变形,因此可以将各个分支看成是只受拉压作用的二力杆。设定如下参数:r1i,B1i,I1i为分支活塞的长度,截面积和惯性矩;r1i-r1i,B2i,I2i为分支液压缸的长度,截面积和惯性矩;Ei为分支ri的弹性模量。当每个驱动力Fai(i=1,2,3)沿着ri作用在驱动分支ri上时,分支上产生的轴向弹性微变形δai(如图2所示)为:
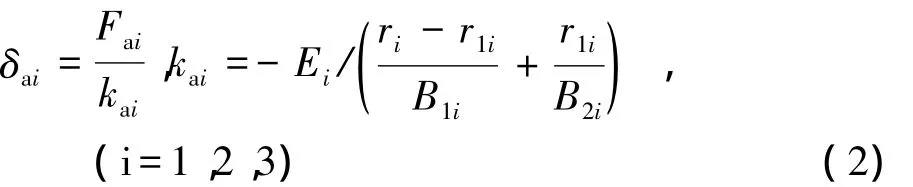

图2 SPS分支在驱动力F a i作用下的轴向变形
kai是SPS分支的轴向刚度,其推导过程参见文献[6]。由式(2)可导出分支的力变形方程为:

式中:Kp是3/6-SPS并联机构驱动分支ri的一个6×6的伴随矩阵。
1.3 3/6-SPS并联机构的总刚度矩阵和弹性变形
根据虚功原理[7-8]有,(Fa1,Fa2,Fa3,Fa4,Fa5,Fa6)沿并联机构变形产生的虚功总量与由广义六维力(F,T)沿在{B}里的点o的变形产生的虚功之和为0,如式(5)所示。令(d Xo,d Yo,d Zo)为{B}里 m弹性微变形的 3个线位移分量,(dφx,dφy,dφz)为{B}里m弹性微变形的3个角位移分量。

结合式(1)可得:

由式(1)~(6)可得到:

令K= ( - JTKpJ)为并联机构的广义刚度矩阵,K是6×6对称矩阵,则它的逆阵K-1必然存在。当给定输入的外载荷时,已知机构的雅克比矩阵J与Kp也就确定下来,动平台中心点处的变形便可由式(8)解得:

2 3/6-SPS并联机构弹性变形算例对比分析
在3SPS并联机构中,令初始独立姿态变量(α,β,γ,Xo,Yo,Zo)随时间 t变化趋势如图3(a)、(b)所示。设 L=600 mm,l=600 mm,F=[-2,-3,-6]TkN,T=[6,8,10]TN·m,Ei=2.11×1011Pa,EiI1i=EiI2i=26 502 N·m2,B1i=B2i=0.0013 m2。通过分析相关方程组,可得到ri的伸长量、驱动分支的轴向变形、驱动力以及动平台的最终弹性变形,分别如图3(c)~(g)所示。
综合图3知,机构在10 s内运动过程如下:点o水平方向上沿X、Y轴对角线移动,竖直方向上不断上升,并且动平台的姿态在发生改变,是一个逐渐远离中心位置的过程;而由图3(e)知,机构在此运动过程中,点o的位置偏移幅值do在不断减小,说明机构在远离中心位置时,刚度在增大,显然违背常理。

图3 3/6-SPS并联机构的弹性分析解
为了弄清机构的刚度变化情况,对该机构再规划一段轨迹,施加同样的六维力F=[-2,-3,-6]TkN,T=[6,8,10]TN·m,观察其在这段轨迹的受力和弹性变形情况。令初始独立姿态变量(α,β,γ,Xo,Yo,Zo)随时间t变化趋势如图4(a)、(b)所示,可得到ri的伸长量、驱动力、动平台的最终弹性变形,分别如图4(c)~(f)所示。
由图4(b)所示,机构此段运动过程如下:点o水平方向上沿X、Y轴对角线的负方向移动,与第一次运动方向相背,竖直方向上不断上升,并且动平台的姿态在发生变化,也是一个逐渐远离中心位置的过程;而由图4(d)~(f)知,机构在此运动过程中,o点的位置偏移幅值do在不断增大,角度变化幅值dfo也在不断增大,符合常理。机构在远离中心位置时,刚度在减小,变形在增大。

图4 第二种工况下3/6-SPS并联机构的弹性分析解
仔细对比两段运动过程中的受力和弹性变形情况,可看到,第一种工况时机构分支的驱动力幅值基本随时间减小,第二种工况时驱动力的幅值基本随时间增大。而驱动力的作用直接影响各个分支的弹性变形情况,即第一种工况时各个分支的变形均随时间减小,第二种工况时各个分支的变形随时间不断增大,而分支变形又和动平台的位姿变化密切相关,分支变形越小,动平台位姿变化越小,由此可以解释第一段轨迹不合常理,第二段又符合常理的原因。
3 结语
通过求解3/6-SPS并联机构中的驱动分支的弹性变形,导出驱动/约束分支的伴随矩阵,根据驱动分支的6×6雅克比矩阵和伴随矩阵,导出3/6-SPS并联机构的总刚度矩阵和弹性变形。3/6-SPS并联机构的刚度随着动平台的位姿变化而变化,一般情况下机构在中心位置时刚度较大,当机构逐渐远离中心位置时,刚度会逐渐减小,动平台位姿变形会增大,但并不是对所有的情况均成立。机构的刚度和机构的位姿、所受广义六维力有密切关系,即使是在同一位姿下的同一个机构,受不同方向的力作用时,其刚度性能不一致;而受到相同力作用的同一机构,在不同位姿下,其刚度性能也不尽相同。研究并联机构的弹性变形,必须理清刚度和位姿、广义六维力之间的关系。
此外,用解析法建立本文并联机构刚度模型时,仅考虑连杆和驱动关节等组件弹性的影响,所建模型缺乏一定的完备性,势必会影响刚度预测的精确度,并且所建模型还缺乏对铰链间隙以及预应力影响的考虑,因此很多研究内容还需要进一步深入开展。
[1] Zhang D,Lang Y T S.Stiffness Modeling for a Class of Reconfigurable PKMs with Three to five Degrees of Freedom[J].Journal of Manufacturing Systems,2004,23(4):316-327.
[2] Liu X J,Wang JS,Pritschow G.On the Optimal Kinematics Design of the PRRRP 2-Dof Parallel Mechanism[J].Mechanism and Machine Theory,2006,41(9):1111-1130.
[3] Lu Y,Hu B,Liu P L.Kinematics and Dynamic Analyses of a Parallel Manipulator with Three Active Legs and on Passive Leg by a Virtual Serial Mechanism [J].Multibody System Dynamics,2007,17(4):229-241.
[4] 许佳音.基于CAD变量几何法并联机床加工复杂曲面的关键技术研究[D].秦皇岛:燕山大学,2010.
[5] 谭 青.两种少自由度并联机构的刚度与弹性力学分析与模拟[D].秦皇岛:燕山大学,2011.
[6] SP Timoshenko,JGere.Mechanics of Materials[M].New York:Van Nostrand Reinhold Company,1972.
[7] Li Y M,Xu Q.Stiffness Analysis for a 3-PUU Parallel Kinematic machine[J].Mech.Mach.Theory,2008(38):186-200.
[8] 石 宁,黄 勇,李晓豁.4自由度串联式机械手轨迹运动学的分析[J].辽宁工程技术大学学报(自然科学版),2011,30(4):562-565.
猜你喜欢
学生天地(2019年28期)2019-08-25
中国外汇(2019年9期)2019-07-13
家庭影院技术(2018年9期)2018-11-02
现代企业文化(2018年13期)2018-06-09
家庭影院技术(2018年3期)2018-05-09
数学物理学报(2018年1期)2018-03-26
光学精密工程(2016年5期)2016-11-07
光学精密工程(2016年4期)2016-11-07
湖北工业大学学报(2016年5期)2016-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
