
基于Pro/E的牛头刨床六杆机构的动态仿真分析
2014-04-08 00:59赵玉成顿文涛滕红丽谷小青马斌强
河南农业大学学报 2014年1期
赵玉成, 顿文涛, 李 勉, 滕红丽, 谷小青, 马斌强, 袁 超
(1. 河南省农业机械试验鉴定站,河南 郑州 450008; 2.河南农业大学,河南 郑州 450002)
牛头刨床是一种常用的平面切削加工机床,通过刀具和工件之间相对的直线往复运动来完成对工件表面的刨削,其刀具结构简单,刃磨方便,在刨削窄长表面时,可以获得较高的生产效率,适于加工尺寸和质量较小的工件,广泛应用于单件及小批量的生产中[1].中小型牛头刨床的主运动大多采用连杆机构中的曲柄滑块机构来实现,使刨床机构的滑枕在返回行程中的速度大于工作行程中的速度.目前,一些学者借助Pro/E软件创建了连杆机构的三维模型,并利用Mechanism模块对其进行仿真分析[2~5].马成习[2],李亭洁等[3]对牛头刨床运动机构进行了研究;赵小刚[4]对曲柄导杆机构的运动进行了仿真,周培显[5]则研究了曲柄滑块的运动.以上研究均对连杆机构的运动学仿真进行了深入地分析,得出了机构的位移、速度、加速度随时间变化的曲线,但对连杆机构的动态仿真却并未涉及.本研究基于Pro/E平台,利用其强大的建模和装配功能,完成牛头刨床六杆机构的虚拟装配,运用其中的Mechanism模块对牛头刨床六杆机构的运动进行动态分析,得到在切削阻力、惯性等外力的作用下,牛头刨床六杆传动机构各构件的受力情况,为机构的结构设计提供参考.
1 牛头刨床六杆机构的仿真模型
1.1牛头刨床六杆机构的参数设置
牛头刨床六杆机构的运动简图如图1所示,曲柄1为原动件,其动力由电机提供并通过齿轮传递过来,其中各构件尺寸参照某牛头刨床六杆传动机构的参数设置[6],曲柄1尺寸LAB=108 mm,导杆3尺寸LCD=620 mm,连杆4尺寸LDE=300 mm,机架尺寸LAC=350 mm.
1.2牛头刨床六杆机构的三维建模与虚拟装配

图1 牛头刨床六杆机构
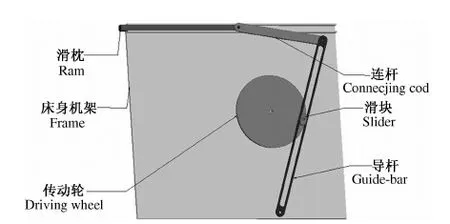
图2 牛头刨床六杆机构装配模型
利用Pro/E的实体造型和虚拟装配功能,首先在零件模式下分别建立组成牛头刨床六杆机构的床身机架、传动轮、滑块、导杆、连杆、滑枕的三维模型,然后在装配模式下对牛头刨床六杆机构的各构件进行虚拟装配[7].在装配过程中需根据各构件的运动形态以及彼此间的相对运动情况,设定相应的接头连接方式.完成装配连接定义后的牛头刨床六杆机构如图2所示.其中,传动轮和导杆与床身机架之间为销钉连接,滑块和导杆之间为滑动杆连接,滑块和传动轮之间为销钉连接,连杆和导杆之间为销钉连接,滑枕和连杆之间为销钉连接,滑枕和床身机架之间为滑动杆连接.
2 牛头刨床六杆机构的动态仿真
2.1牛头刨床六杆机构装配模型的自由度和冗余约束
利用Pro/Mechanism模块进行运动分析时,每次分析都会计算模型的自由度和冗余,并在分析过程中忽略产生冗余的接头约束,这样导致动态仿真分析的结果不正确.因此,对机构进行动态仿真分析时,必须从机构模型中清除冗余[8,9].
牛头刨床六杆机构是平面传动机构,其自由度为1.但在Pro/Mechanism模块中,将机构模型作为空间机构系统来对待,其自由度计算采用公式[8]:
自由度=6×(不包含基础的主体数)-约束
但是,有时在实际中往往会出现过度约束的情况,这样就会出现在物理上没有实际意义的负的自由度,因此,在计算自由度时还需考虑冗余,计算公式变为:
自由度=6×(不包含基础的主体数)-约束+冗余
在Pro/Mechanism模块中,建立自由度和冗余测量,对牛头刨床六杆机构在虚拟装配中定义的接头连接方式的自由度进行计算,其自由度为1,但出现了6个冗余.这主要是由于滑块和滑枕分别与2个不同的构件连接而出现了过度约束.其中,滑块既与导杆以滑动杆约束连接又与传动轮以销钉约束连接,出现了3个冗余;滑枕既与床身机架以滑动杆约束连接又与连杆以销钉约束连接,出现了3个冗余.解决办法是分别将滑块和滑枕的滑动杆约束连接改为常规(曲面上的边)连接,就可以消除冗余.
2.2牛头刨床六杆机构的动态仿真模型
在装配模式下完成装配连接定义的牛头刨床六杆机构模型导入Pro/Mechanism模块中,建立牛头刨床六杆机构的动态仿真模型[10].

图3 牛头刨床六杆机构的动态仿真模型
首先,根据机构的自由度,消除冗余约束,设置合适的接头连接方式:连接A,B,C,D,E分别采取销钉连接,连接F,G分别采取常规(曲面上的边)连接.然后参照文献[6]中牛头刨床六杆机构的相关参数要求进行相应的建模定义.根据各构件的质量大小定义其质量属性,传动轮的质量为12 kg,滑块质量为5 kg,导杆质量为12 kg,连杆质量为4 kg,滑枕质量为45 kg.在滑枕上点H处定义牛头刨床六杆机构在工作行程中的切削阻力,当滑枕的位移小于工作行程的0.05倍时,切削阻力为0;当滑枕的位移大于等于工作行程的0.05倍时,切削阻力为250 N.在连接A上添加连接轴伺服电机,设置连接轴的速度为30(degree·s-1).
图3所示为经过消除冗余约束和添加建模图元后的牛头刨床六杆机构动态仿真模型.
2.3牛头刨床六杆机构的动态仿真分析
在Pro/Mechanism模块中,设置重力加速度的数值和方向,利用拖动和快照功能定义动态分析的初始条件,定义牛头刨床六杆机构的分析类型为动态,设置持续时间为7.2 s,并启用重力,对工作行程中的牛头刨床六杆机构进行动态仿真分析,得到各构件接头连接的反作用力.
图4所示是接头A的连接反作用力.图4-a是连接A处传动轮在水平方向的受力情况,当有切削阻力作用时,传动轮受到水平向左方向的作用力,有缓慢减小的趋势,在行程过半后变化幅度不大.图4-b是连接A处传动轮在竖直方向的受力情况,当有切削阻力作用时,传动轮受到竖直向上方向的作用力,呈线性减小的趋势,有较大幅度的变化.
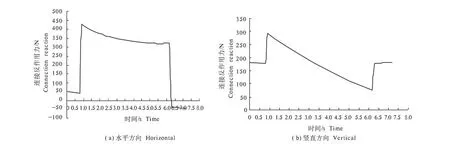
图4 接头A的连接反作用力

图5 接头B的连接反作用力
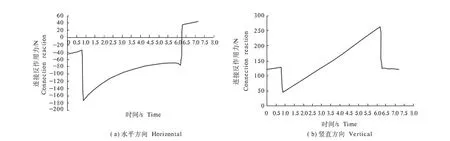
图6 接头C的连接反作用力
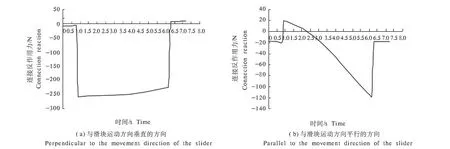
图7 接头D的连接反作用力

图8 接头E的连接反作用力
图5所示是接头B的连接反作用力.图5-a为滑块运动过程中连接B处在运动平面内与滑块运动方向垂直的方向上传动轮的受力情况,当有切削阻力作用时,传动轮在连接B处始终受到向左方向的作用力,有缓慢减小的趋势,在行程过半后变化幅度不大.图5-b为滑块运动过程中连接B处在运动平面内与滑块运动方向平行的方向上传动轮的受力情况,当有切削阻力作用时,传动轮始终受到向上方向的作用力,呈抛物线变化趋势,在行程的一半位置处作用力达到最大.
图6所示是接头C的连接反作用力.图6-a是连接C处导杆在水平方向的受力情况,当有切削阻力作用时,导杆受到水平向右方向的作用力,有缓慢减小的趋势,在行程过半后变化幅度不大.图6-b是连接C处导杆在竖直方向的受力情况,当有切削阻力作用时,导杆受到竖直向上方向的作用力,呈线性增大的趋势,有较大幅度的变化.
图7所示是接头D的连接反作用力.图7-a为滑块运动过程中连接D处在运动平面内与滑块运动方向垂直的方向上导杆的受力情况,当有切削阻力作用时,导杆在连接D处始终受到向右方向的作用力,整体变化幅度不大.图7-b为滑块运动过程中连接D处在运动平面内与滑块运动方向平行的方向上导杆的受力情况,当有切削阻力作用时,导杆受到向上方向的作用力并线性减小,在约2.4 s时变为零,之后受到向下的作用力并线性增大.
图8所示是接头E的连接反作用力.图8-a是连接E处滑枕在水平方向的受力情况,当有切削阻力作用时,滑枕受到水平向左方向的恒定作用力.图8-b是连接E处滑枕在竖直方向的受力情况,当有切削阻力作用时,滑枕受到竖直向上方向的作用力并线性减小,在约2.2 s时变为零,之后受到竖直向下的作用力,呈抛物线变化趋势,在约5 s时再次变为零,之后又受到竖直向上的作用力并线性增大.
综上所述,在考虑了切削阻力、惯性力等外力的作用,牛头刨床六杆机构在工作行程中刚出现切削阻力的位置时,接头A和B所受到的力最大;在工作行程中切削阻力刚消失的位置时,接头C和D所受到的力最大;而接头E所受到的最大力不仅出现在工作行程中刚出现切削阻力的位置,而且还出现在工作行程中切削阻力刚消失的位置.
4 结论
借助Pro/E软件对牛头刨床六杆机构进行建模和虚拟装配,并利用Pro/Mechanism模块对其进行动态仿真分析.首先,计算了虚拟装配模型的自由度,并消除其中的冗余约束;其次,定义各构件的质量属性,添加相应的建模图元,建立了牛头刨床六杆机构的动态仿真模型,最后建立相关的测量并进行动态仿真分析.这样,在充分考虑了机构中各构件的质量属性和工作行程中切削阻力的影响,得到了机构各个构件接头连接的反作用力曲线.其中,接头A和B所受到的最大力出现在工作行程中刚出现切削阻力的位置;接头C和D所受到的最大力出现在工作行程中切削阻力刚消失的位置;而接头E所受到的最大力不仅出现在工作行程中刚出现切削阻力的位置,而且还出现在工作行程中切削阻力刚消失的位置.通过这些曲线可以很直观地了解到机构在工作行程中各构件在相应连接处的受力情况,为牛头刨床六杆机构的结构分析提供可靠的理论依据.
参考文献:
[1]顾维邦.金属切削机床概论[M].北京:机械工业出版社,2001.
[2]马成习.基于Pro/E的牛头刨床运动机构建模及其运动仿真分析[J].机械设计与制造,2008(10):182-183.
[3]李亭洁,李炳文,赵化兰,等.基于Pro_MECHANISM刨床急回机构建模及运动仿真[J].煤矿机械,2009,30(4):185-187.
[4]赵小刚.基于Pro/Mechanism的曲柄导杆机构运动学仿真[J].广西轻工业,2011(10):64-65.
[5]周培显.基于PROE曲柄滑块机构的运动仿真及分析[J].新技术新工艺,2012(2):26-28.
[6]綦耀光,刘 峰.机械设计基础[M].东营:中国石油大学出版社,2006.
[7]孙江宏,黄小龙,罗 珅.Pro/ENGINEER Wildfire虚拟设计与装配[M].北京:中国铁道出版社,2004.
[8]CHANG K H .Mechanism design with Pro/ENGINEER wildfire 3.0[M]. Shawnee :Schroff Development Corporation,2008.
[9]华 昊,梁 文.消除冗余的柴油机曲柄连杆机构优化方法[J].CAD/CAM与制造业信息化,2009 (6):53-57.
[10]祝凌云,李 斌.Pro/Engineer运动仿真和有限元分析[M].北京:人民邮电出版社,2004.
猜你喜欢
橡塑技术与装备(2022年7期)2022-07-06
机械设计与制造工程(2022年1期)2022-02-19
模具制造(2019年10期)2020-01-06
制造技术与机床(2018年7期)2018-08-13
华北理工大学学报(自然科学版)(2017年4期)2017-11-29
制造技术与机床(2017年8期)2017-11-27
婚姻与家庭·性情读本(2017年1期)2017-02-16
中国塑料(2015年9期)2015-10-14
制造技术与机床(2015年10期)2015-04-09
河南科技(2015年2期)2015-02-27
