
一组新型大工作空间被动球面铰链构建*
2014-04-09 07:38
制造技术与机床 2014年10期
(燕山大学机械工程学院 河北 秦皇岛 066004)
被动球面铰链是一种可实现3个转动的连接铰链,通常由固连于输出杆的球头与固连于支撑杆的球窝构成,任意一端为机架时,另一端表现出3个转动自由度。作为机构学中基本的运动单元之一,被动球面铰链在机械装备及机器人等领域得以广泛应用,受到国内外学者的广泛关注。
目前,对被动球铰的研究有很多,支前峰[1]提出了一种滚动球铰链结构,利用多万向轮组合形成凹球面,将球头与球窝的滑动摩擦转化为滚动摩擦。周燕辉[2]运用TRIZ理论设计出SSR、SSS两种新型复合球副,并对其自由度和力学性能进行了分析。高金莲[3]等在3-RSS/S型踝关节康复并联机器人的球铰链的设计中,利用球铰转动时极限转角不对称的特点,设计完成了特定球铰链,并给出了球铰链仿真设计法的一般步骤。魏敏和[4]等建立了转台球铰链的无量纲模型,并运用二维空间搜索的方法得到了最优球铰链法线和球铰链最大转角。万福龙[5]提出了球面铰的设计原则、导出了球面副的摩擦力矩计算公式。U.Heisel[6]等设计了一种可控制的球面铰链,用来决定六足机器人的工作空间。Doru Talaba[7]提出了角能量函数来表述球面铰链的结构所允许的运动范围。邓志诚[8]等提出了一种用于可重构移动机器人的主动球铰,采用串并联相结合的形式,既满足了机器人的结构尺寸要求,又能提供较大的输出力矩和工作空间。崔学良[9]等针对大载荷和大姿态要求的工况,设计了一种由三转动副组成,具有高刚度、大偏转角的复合铰链。张林初[10]等设计了一种新型的球铰装置,以满足飞机大部件与通用工装快速联接形成球铰的要求,并能够在调姿完成以后夹紧防止转动。唐群国[11]等提出了一种润滑性能好,摩擦损失小,用于改良曲轴连杆式液压马达的线接触球铰副。尚国强[12]等针对3-RPS并联机床,考虑强度、刚度、功能性要求等关键因素,设计出了一套球铰链。王巍[13]等利用丝杠摇块机构构成并联机构支链,再将两个支链并联且与一个旋转机构串联,从而构成主动球铰机构。
对被动球面铰链的研究,多是针对具体的目标要求,设计具有特殊结构的被动球面铰链,而被动球面铰链工作空间小的共性关键问题,一直没有得到很好解决,迄今也未见有相关研究报道。
实际上,传统球面铰链有许多特点:结构简单、紧凑、占用空间小;工艺成熟、精度高;接触刚度大、可靠性高等。
球面铰链工作空间偏小,严重制约了其在实际工程中的应用,如含有被动球面铰链的并联机床,因受球面铰链的工作空间小的影响,无法实现较大的工作空间要求;在人形机器人机构中,因包含球面铰链、交集后的工作空间变小、难以满足肢体运动要求等,因此,构建一种具有大工作空间的被动球面铰链有重要的理论意义与工程应用价值。
本文以传统球面副为原型,在结构及工作空间分析基础上,采用运动与约束单项分解、交错匹配的方法,将传统球面副输出杆的绕任意转轴的转动等效转换为绕3个彼此正交轴的转动,加大约束球窝半径,重新匹配3个转动与约束之间的顺序、构成方式及位置关系,构建并设计完成一组大工作空间被动球面铰链,即双耳支架固定型被动球面铰链、双耳支架旋转型被动球面铰链、球/窝换位型被动球面铰链和U形拨叉内置型被动球面铰链。实现了增大球面铰链工作空间目的,扩展了作为机构学基本单元在机构综合与创新设计中的适应范围。
1 传统球面铰链结构与工作空间分析
球面铰链(副)可实现3个自由度转动,并可承担拉、压载荷。其典型结构可简化成两种基本形式,如图1所示。其中图1a为垂直剖分球窝式结构,即用与支撑杆轴线垂直且过球心的平面把整体铰链分割成两部分:与支撑杆固联的一部分半球窝称为支撑球窝,另一环形部分用于限制球头分离的、称为约束球窝;约束球窝(输出杆从其中穿过)与支撑球窝为可拆固联结构,限制球头与输出杆的3个线位移。图1b为轴向剖分球窝式结构,即用过支撑杆轴线的轴向剖面把铰链分割成对称的两部分,每部分半球窝结构相同、合扣在一起、固联包住球头,限制球头与输出杆的3个线位移。
球面铰链的运动特征:输出杆具有3个转动,其转动的轴线为不确定的,即输出杆可以绕过球心的任何轴线回转。
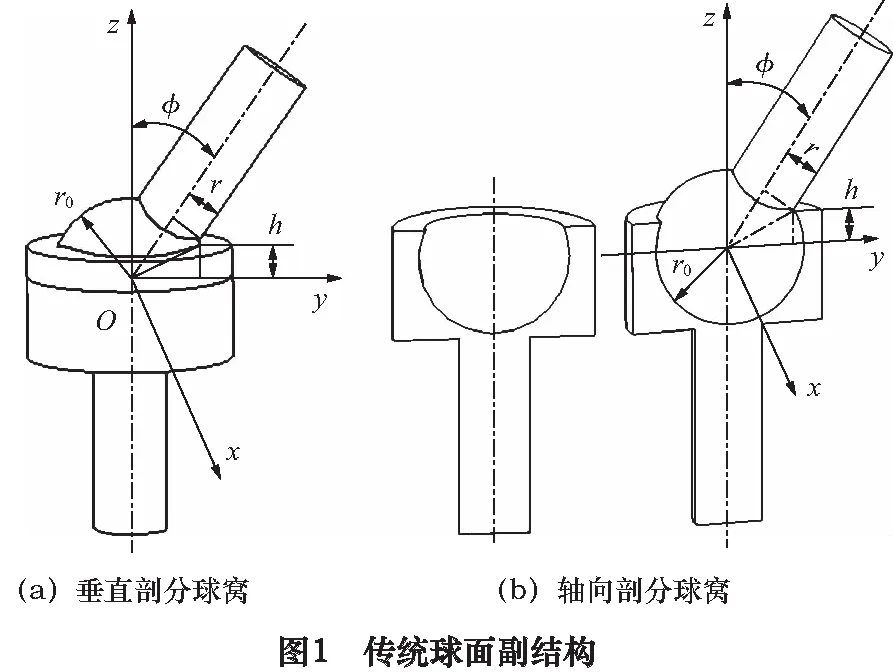
取球心点O为原点,建立固定坐标系O-xyz,其中,z轴过球心与下支撑杆轴线重合,正向向上;y轴过球心与z轴垂直,正向向右;x轴由右手螺旋法则确定。
在球面铰链的构件不出现硬干涉的条件下,输出杆绕x轴、y轴的摆动角范围相同:
φ=90°-arcsin(r/r0)-arcsin(h/r0)
(1)
其中:φ为全方位输出杆最大摆角,r为输出杆的半径,h为约束球窝的环高,r0为球头与球窝公共半径。
在保证机构强度条件下,工程上输出杆半径r、约束球窝的环高h均不能太小,因此,输出杆的摆角范围被限制,一般不超过±52°~58°。

2 大工作空间被动球面铰链构建
基于传统球面铰链的分析,提出新型被动球面铰链构建规则如下:
(1)保持原球面铰链的运动特征不变,将绕任意轴的3个转动等效成绕3个正交轴的转动。
以垂直剖分球窝式球面铰链为原型,将运动、约束进行单项分解、交错匹配,输出杆的运动分解为次序的、正交的3个转动,即绕x、y、z轴转动。
(2)保持支撑球窝半径不变,增大约束球窝半径,采用支撑球窝与约束球窝分离的结构。
两销轴所在轴线定义为y轴、输出杆轴线定义为z′,右手螺旋法定义x轴。
定义约束球窝回转中心线与销轴的轴线所在的平面为对称基准面,在约束球窝上平行基准面方向,开设径向内、外通透的长槽,输出杆由槽中伸出后在长槽的对称面内(沿槽壁面或绕x轴)往复摆动,同时可绕自身轴线z′转动。形成等效的绕y、x、z轴次序转动。
为机械加工方便、排除构件之间的硬干涉,只保留约束球窝的对称基准面两侧一定宽度,形成U形圆柱面组合体,即U形拨叉。
(3)彼此分离的球窝之间,设计特殊的等效球头或等效球头-球窝结构。
在输出杆与U形拨叉之间,增设双短圆柱形支撑辊,用于取代原型铰链结构中的球头与约束球窝的接触,可限制输出杆被拉出;球头与支撑球窝保持不变,在受压力作用下,提供接触抗力。短圆柱形支撑辊与球头(或球窝)构成一组合体,通过输出杆的的连接与支撑,形成特殊的等效双球头结构。在结构上造成约束球窝半径与输出杆半径相对较大差值,进而增大输出杆摆动范围。
基于上述规则,在保持传统球面副功能的前提下,构建一组新型的输出杆具有大工作空间的可绕x轴、与约束球窝一同绕y轴摆动及绕自身轴线z′转动的球面铰链。
2.1 双耳支架固定型被动球面铰链
双耳支架固定型被动球面铰链,如图2所示。双耳支架与下支撑杆固联。U形拨叉为半圆弧形柱面组合体,在其轴向宽度中间对称基准平面内,沿圆周方向开设径向内、外通透的封闭长槽;通过两个同轴、过球心的销轴连接于双耳支架的外侧,可绕两个销轴往复摆动。U形拨叉等效为原球面铰链的约束球窝。
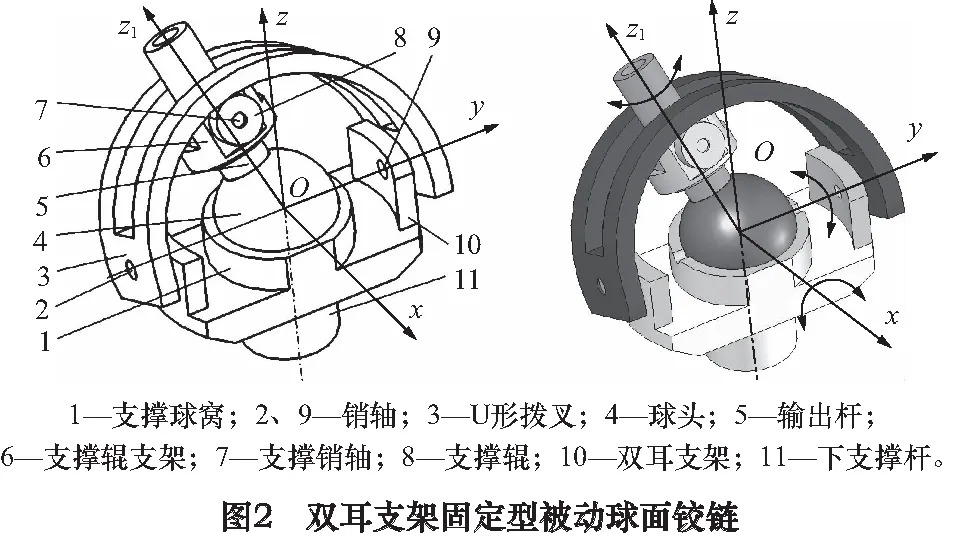
输出杆与球头于下端对心固定,球头置于支撑球窝中两者构成球面副。支撑辊支架为回转体,前后各安装有一支撑销轴及支撑辊,输出杆由支撑辊支架的中间圆柱形孔穿过、两者可相对转动。
输出杆为圆形阶梯结构,与支撑辊支架(连同装在其上的支撑销轴、支撑辊)实现轴向定位。支撑辊的圆柱面与U形拨叉圆弧内表面保持接触,两者轴线相平行,以实现被动滚动支撑。
球头、输出杆、支撑辊支架及支撑销轴和支撑辊构成新的等效双球头。
输出杆具有正交的3个转动:沿U形拨叉的槽侧壁往复摆动,即绕x轴转动;与U形拨叉一起,绕装在双耳支架两侧的销轴往复摆动,即绕y轴转动;绕输出杆自身轴线不受限制地独立旋转。
当输出杆受离心拉力时,该力将由输出杆的定位轴肩传到支撑辊支架、支撑销轴、支撑辊及U形拨叉,最后到双耳支架。共同完成原型铰链的约束球窝的功能;当受到向心压力时,球头与支撑球窝直接接触承担载荷。
工作空间指标:取球心点O为原点,建立固定坐标系O-xyz,其中y轴穿过球心与双耳支架两侧销轴线重合,正向向右;z轴穿过球心与下支撑杆轴线重合,正向向上;x轴由右手螺旋法则确定。
输出杆绕y轴摆动范围为
φy=90°-arcsin(rm/r0m)
其中:rm为输出杆在球头处的半径,r0m为下球头半径。当rm、r0m分别取6 mm、 25 mm时,φy可达±76°。
输出杆绕x轴摆动范围为


与原型球面铰链比较,工作空间增大12°~18°。
2.2 双耳支架旋转型被动球面铰链
为了使关节体积小、结构紧凑简单,提出了新的双耳支架旋转型被动球面铰链,如图3所示。双耳支架可以绕下支撑杆轴线不受限制地旋转(上部轴向定位);U形拨叉结构与双耳支架固定型被动球面铰链中的相同,通过两个同轴、过球心的销装于双耳支架的内侧,可绕两个销轴往复摆动。
输出杆与球头于下端对心固定,球头置于支撑球窝中构成球面副。输出杆穿过U形拨叉的部分采用方形截面,与U形拨叉的槽同宽。位于输出杆上的支撑辊外圆柱面与U形拨叉圆弧内表面抵住接触,两者的轴线平行,从而实现被动滚动支撑。
支撑辊、输出杆及球头构成新的等效双球头。
输出杆具有正交的3个转动:沿槽侧壁往复摆动,即绕x轴转动;与U形拨叉一起,绕装在双耳支架两侧的销轴往复摆动,即绕y轴转动;随双耳支架绕下支撑杆轴线z轴转动,在某一定范围内转动不灵活。
当输出杆受离心拉力时,该力将通过输出杆上的销轴、支撑辊、U形拨叉传至双耳支架,共同完成原型铰链的约束球窝的功能;受到向心压力时,球头直接接触支撑球窝,进而承担载荷。
类似地,取球心点O为原点,建立固定坐标系O-xyz。输出杆绕x轴摆动范围可达±70°;绕y轴摆动范围可达±80°;绕z轴的转动不受限制。
与原型球面铰链比较,工作空间增大18°~24°。
2.3 球头/窝换位型被动球面铰链
上述两种被动球面铰链存在两个相同的问题:
①公式(1)成立的条件是支撑球窝恰为半球窝,两种铰链都没有改变这一基本条件;
如果减小支撑球窝中心角(小于半球),则输出杆绕x或y轴的摆动范围将更大或甚至超过90°。
②来自输出杆轴线方向的压力均通过球头的中心,当输出杆绕y轴偏角较大时,球头与球窝之间垂直轴线方向的约束力变小,球头易于脱出或损坏结构。
观察人体中的髋关节、肩关节,发现其均属于支撑球窝固定(球窝小于半球)、球头与输出杆固联的结构形式,当肢体运动偏角较大且在受轴向压力作用时,球头与球窝容易移位(错位),即通常所谓的“脱臼”。
为了进一步扩大空间、避免球面副“脱臼”、改善铰链受力状态,提出了新的球头/窝换位型被动球面铰链,如图4所示。双耳支架与下支撑杆固联为一体。U形拨叉与双耳支架固定型的被动球面铰链中的相同,通过两个同轴线且过球心的销轴、装在双耳支架的内侧,可绕两个销轴往复摆动。
将球窝中心角缩小(远小于半球窝)、与球头换位,称为活动球窝,输出杆轴线与活动球窝回转轴线重合、且于下端固联,而下支撑杆与球头的球心点对心固定,活动球窝与球头接触仍构成球面副;支撑辊支架、支撑销轴、支撑辊、输出杆的结构和连接关系与双耳支架固定型被动球面铰链的相同。
活动球窝、输出杆、支撑辊支架及支撑销轴和支撑辊共同构成等效球头-球窝。
将活动球窝外形尺寸适当变小,构件间不出现硬干涉的条件发生了改变,输出杆的摆动范围相应被放大。此外,活动球窝与球头之间的力的作用点始终位于球心与输出杆轴外端之间,即球面上、沿法线方向。根本上避免了输出杆处于大摆角或极限位置时,在输出杆轴线方向压力作用下,球窝与球头脱臼的问题。
输出杆具有正交的3个转动:沿槽侧壁往复摆动,绕x轴转动;与U形拨叉一起,绕装在双耳支架两侧的销轴往复摆动,绕y轴转动;绕输出杆自身轴线不受限制的旋转。
当输出杆受离心拉力时,该力通过输出杆、支撑辊支架、销轴、支撑辊、U形拨叉传到双耳支架,实现原型铰链的约束球窝的功能;受到向心压力时,球窝与支撑球头直接接触并承担载荷。
类似地,输出杆绕x轴摆动范围约±68°;绕y轴摆动范围约±110°;绕z轴的转动不受限制。
与原型球面铰链比较,工作空间增大16°~52°。
2.4 U形拨叉内置型被动球面铰链
在上一球面铰链中,由于双耳结构的硬干涉,输出杆绕x轴转动范围较小。为了扩大双耳支架与U型拨叉同平面时,输出杆的摆动范围,提出新的U形拨叉内置型被动球面铰链,如图5所示。
实心U形拨叉与双耳支架两侧的耳同宽,两端设有销孔,装在双耳支架的内侧,可绕装在双耳支架两侧的销轴往复摆动;双耳支架可以绕下支撑杆轴线不受限制的旋转(上部轴向定位)。
中空输出杆中间开有长方形通孔,中间支撑辊置于方孔中,与实心U形拨叉的圆弧内表面接触,并且两者轴线平行实现反向滚动支撑;中空输出杆中间、上部留有适当空间,输出杆摆动至极限位置时,恰好套在单耳外侧。从而增大绕x轴的转动范围。
输出杆下端与活动球窝固定,而球头与下支撑杆在球心点对心固定,活动球窝与球头接触仍构成球面副。活动球窝、输出杆、中间支撑辊和U型拨叉一起构成等效球头-球窝。该铰链的运动、受力特征与球头/窝换位型被动球面铰链相同。同样,输出杆绕x轴、y轴的摆动范围均可达±110°;绕z轴的转动不受限制。与原型球面铰链比较,工作空间增大52°~58°。
3 结语
本文采用运动与约束单项分解、交错匹配的方法,提出了转动等效替代、支撑球窝与约束球窝相分离措施以及等效双球头或等效球头-球窝结构,构建设计了4种新型大工作空间被动球面铰链,增大工作空间10°~58°。解决了传统球面副因工作空间小导致其工程应用受到限制的共性问题,可大幅改善和提高机器人、并联机床等装备的工作空间,对扩大球面铰链的应用范围,具有重要的指导意义和实践价值。
[1]支前峰,刘远伟.滚动球铰链的研究[J].甘肃工业大学学报,2003,29(1): 50-53.
[2]周燕辉.一类新型复合球副的设计及其制造[D].南昌:南昌大学,2005.
[3]高金莲,韩英强,李波,等.并联机器人球铰链的仿真设计[J].机械设计 2007,24(2):53-55.
[4]魏敏和,韩先国,张军.3-UPS/S并联转台球铰链的优化研究[J].制造技术研究,2011(3):19-24.
[5]万福龙.电子机械设备中球面铰的设计[J].现代设计技术,2004,33(2):75-78.
[6]Heisel U, Strutinskiy S, Sidorko V, et al.Development of controllable spherical fluid friction hinges for exact spatial mechanisms[J].Production Engineering, 2011, 5(3): 241-250.
[7]Doru Talaba.The angular capacity of spherical joints used in mechanisms with closed loops and multiple degrees of freedom[J].Robotics and Computer-Integrated Manufacturing, 2012, 28(5): 637-647.
[8]邓志诚,王巍,宗光华.用于可重构地面移动机器人的主动球铰[J].北京航空航天大学学报,2006,32(12):1455-1458.
[9]崔学良,韩先国,陈五一.特殊复合铰链3-RPS并联机构及其连续刚度模型[J].北京航空航天大学学报,2010,36(11):1275-1280.
[10]张林初,蒋君侠.一种新型球铰装置的设计与分析[J].机床与液压,2012,40(22):1-4.
[11]唐群国,陈卓如,金朝铭,等.液压马达新型球铰副的设计[J].机械工程师,2000(1):37-38.
[12]尚国强,陈五一,韩先国,等.并联机床的球铰链设计与分析[C].机械技术史及机械设计,2008:286-290.
[13]王巍,张厚祥,邓志诚,等.基于串并联机构的自重构移动机器人[J].机械工程学报,2008,44(5): 92-101.
猜你喜欢
中学生数理化(高中版.高考数学)(2022年2期)2022-04-26
电工材料(2022年2期)2022-04-26
湖北电力(2021年3期)2021-08-23
设备管理与维修(2021年24期)2021-02-10
矿山机械(2020年12期)2020-12-19
煤矿机电(2020年5期)2020-11-02
制造技术与机床(2019年8期)2019-09-03
汽车实用技术(2019年7期)2019-04-18
中学生数理化(高中版.高二数学)(2018年1期)2018-02-26
中学数学杂志(高中版)(2017年4期)2017-07-27
