北斗铁路列车卫星定位与辅助预警系统
2014-05-09 12:48余颜丽
铁路通信信号工程技术 2014年2期
余颜丽 虞 凯
(中国中铁二院工程集团有限责任公司,成都 610031)
1 概述
北斗卫星导航系统是中国正在实施的自主发展、独立运行的全球卫星导航系统,与美国GPS、俄罗斯格洛纳斯、欧盟伽利略系统并称全球4大卫星导航系统,可在全球范围内全天候、全天时为各类用户提供高精度、高可靠的定位、导航、授时服务[1]。与GPS、格洛纳斯和伽利略系统相比,北斗系统的优势在于短信服务和导航结合,增加了通信功能;自主系统,高强度加密设计,安全、可靠和稳定,适合关键部门应用[2]。目前北斗卫星系统已经广泛应用于交通运输、通信、电力、金融、气象、海洋和水文监测等各个方面。
在我国铁路领域,凡与卫星导航相关的技术产品,一般都采用GPS。随着北斗卫星导航系统的建设和应用,以及我国既有线列车提速和客运专线建设步伐加快,北斗导航卫星将在铁路行业开展大面积应用,例如列车、地质灾害的监控和工程测量等[3]。
实时、精确地确定列车在线路中的位置是保证安全、发挥效率、提供最佳服务的前提。在轨道交通行车安全和指挥系统中,列车定位是一项关键性的技术。准确、及时地获取列车位置信息,是列车安全、有效运行的保障。针对此,本文引入北斗卫星导航技术,提出北斗铁路列车卫星定位与辅助预警系统,防止列车追尾事故的发生。该系统是一种相对独立于信号系统的列车追踪接近预警系统,系统能够对行驶中列车进行准确定位,并根据铁路运行列车的运行位置进行相邻列车间距预警计算。当相邻列车间的距离达到预警条件时,提示司机和调度人员注意行车安全,同时,当运用成熟时,可提供与列车调度体系中其他运行系统的通信数据接口。
2 系统需求
本系统的实现,首先需要确定合适的列车追踪预警距离,既要保证在列车间距超过认可的安全范围时及时提醒司机,又要避免频繁提醒对司机正常行车的干扰;其次需要按不同线路、不同线别(上行、下行)对运行列车进行位置识别,根据线路间距等技术指标综合考虑系统中对列车定位精度的要求。
2.1 列车追踪预警距离
列车预警距离应包含3部分:列车紧急制动距离、司机做出判断时列车运行距离和预警信息传输时列车运行距离。
按照我国铁路相关规定的要求[4,5,6],列车的紧急制动距离如表1所示。
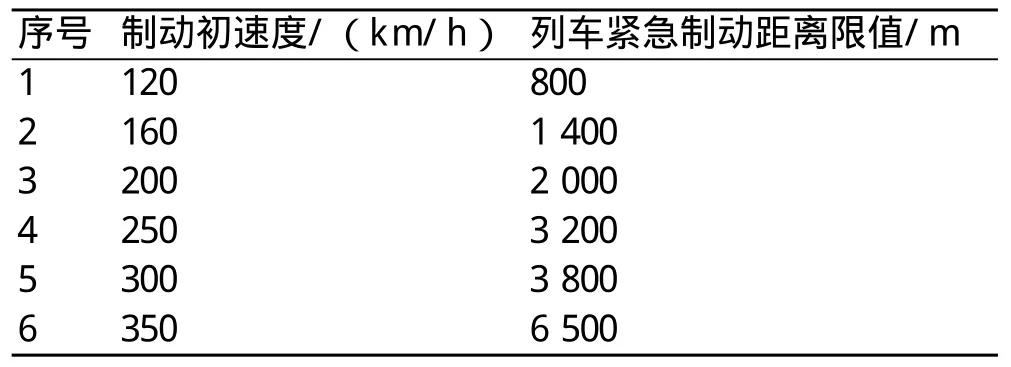
表1 列车紧急制动距离限值表
从表1可以知道,列车在不同制动初速度时的紧急制动距离限值是不同的,系统中可以考虑按列车运行速度的不同设置预警距离。
同时,为了降低接近预警提示对司机的干扰,系统中设置的预警距离应该大于列车紧急制动距离限值,但也不能设置过大而影响预警效果。考虑系统对司机预警后给司机30 s的思考和处理时间,然后司机才可能采取相应的处理措施,因此,这段时间内列车的运行距离如表2所示。

表2 30 s内不同运行速度的列车运行距离表
预警信息传输时延与所选用的通信网络有关。按最大传输时延10 s考虑,则在这段时间内列车的运行距离如表3所示。
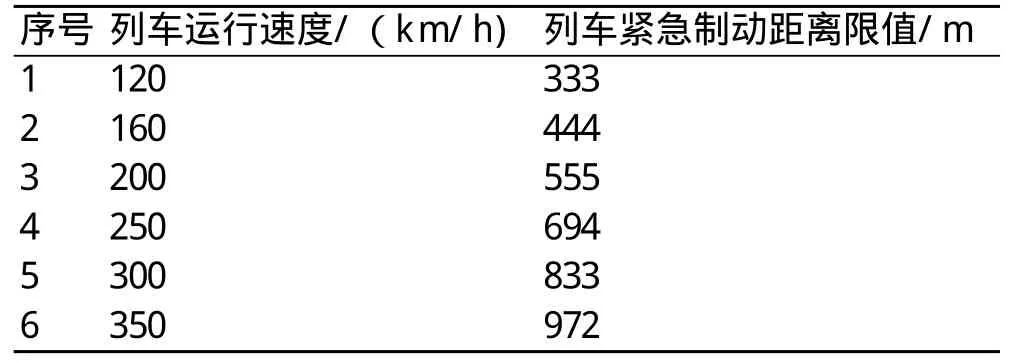
表3 10 s内不同运行速度的列车运行距离表
由此,可计算得到针对不同运营速度的线路,列车追踪预警距离如表4所示。
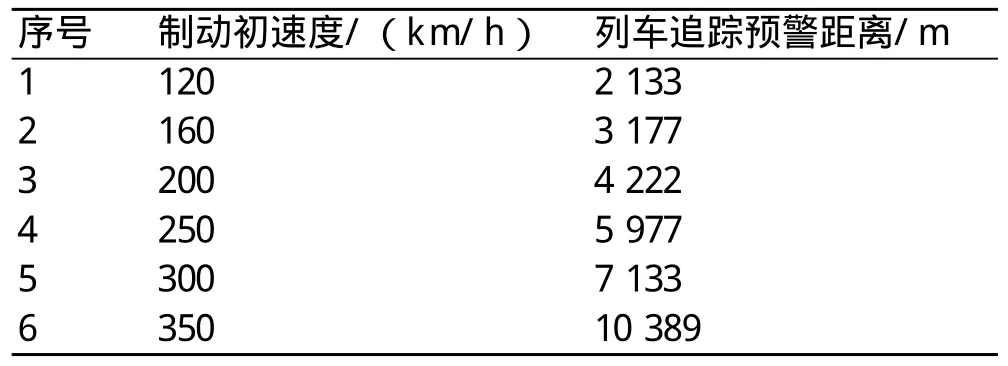
表4 不同运营速度线路的列车追踪预警距离表
2.2 列车运行位置定位精度
列车运行位置的定位可按轨道方向分为纵向和横向。纵向上,系统对列车位置的定位精度应保证能识别在同一轨道上运行的前后两列车,能达到100 m就足够了;横向上,系统对列车位置的定位精度应保证能识别在上行轨道和下行轨道上运行的两列车,需根据高速铁路上、下行线路线间最小间距而确定。
按照我国铁路相关规定的要求[4,5,6],高速铁路区间正线、站内正线的线间最小距离如表5所示。
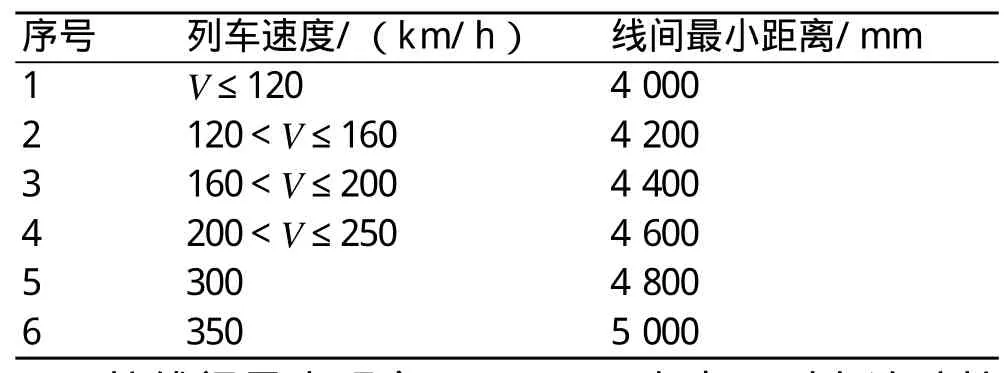
表5 铁路线间距要求
按线间最小距离4 000 mm考虑,列车追踪接近预警系统可按列车定位精度优于2 m考虑。
3 系统构成
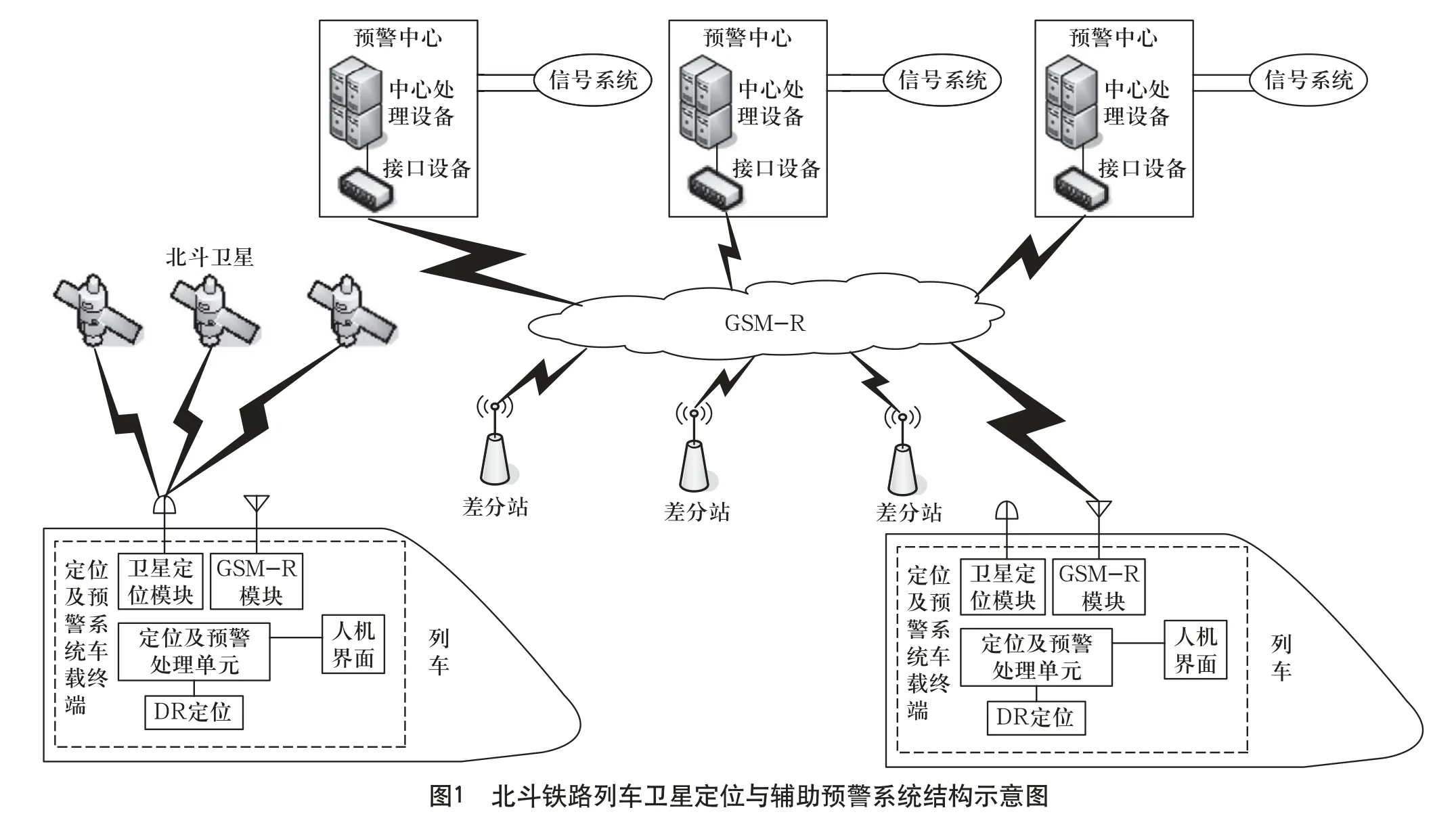
北斗铁路列车卫星定位与辅助预警系统由预警中心、GSM-R通信网络、定位及预警系统车载终端(简称车载终端)、差分基准站等构成。系统结构示意如图1所示。
北斗铁路列车卫星定位与辅助预警系统由列车卫星定位子系统和列车安全行驶辅助预警子系统构成。
列车卫星定位子系统实现对列车运行位置的精确定位,主要由车载终端、差分基准站、GSM-R通信网络构成。车载终端和差分基准站实时接收北斗定位卫星的信号,计算位置信息,并通过GSM-R网络位置信息(包括经度、纬度等)实时传送至列车安全行驶辅助预警子系统的数据处理中心。
列车安全行驶辅助预警子系统主要由预警中心、GSM-R通信网络构成。预警中心接收来自于列车卫星定位子系统的定位信息,计算列车间的距离,对列车间距实时监控。当列车间距达到预警距离时,则通过车地无线网络发送预警信息给司机,为司机提供辅助预警,防止列车追尾事故的发生。
4 列车卫星定位子系统
4.1 定位技术方案
列车在运行过程中,由于线路、地形及其他情况的变化较大,不同的地方需要采用不同的定位方式。在铁路区间北斗卫星信号接收状况良好的情况下,采用北斗卫星定位。当在隧道、山区、森林和城市建筑群等处,北斗卫星信号会减弱或消失,这时需要采用其他辅助定位方式。
可供选择的辅助定位方式如下。
1)车轮速度传感器定位
利用列车车轮速度传感器脉冲信号,计算列车实时运行速度。在北斗卫星信号失效时,根据列车速度推算列车运行位置。由于列车在运行过程中轮轨磨损,空转、打滑,利用车轮速度传感器计算列车运行速度存在较大的误差。
2)采用航位推算(DR)进行定位
采用DR方法进行定位,在进入隧道后利用陀螺仪判断列车运行方向,通过读取列车在进入隧道时的即时速度,配合加速度传感器获得精确的位置信息。DR是典型的独立定位技术[7]。其原理就是陆地车辆定位可以认为是行驶在二维平面内,在已知起点的情况下,测出车辆行驶的方向和距离,求出X、Y方向上的位移量,从而推算出行驶列车的位置。
综合考虑,本系统采用“北斗卫星+DR组合定位”的方案。结合目前我国铁路列车己有的行车监控仪,并安装上压电速率陀螺,与定位终端一起形成卫星定位+DR组合定位导航方案。方案示意如图2所示。

4.2 卫星差分定位技术方案
对列车运行位置的精确定位是列车安全行驶辅助预警系统的关键点。北斗卫星导航系统的定位精度在10 m左右,尚不能满足列车精确定位的要求,需要采取差分等误差补偿处理技术。
差分定位是根据两台以上接收机的观测数据来确定观测点之间相对位置的方法[8]。为了实现差分定位,需在铁路沿线设置地面卫星差分基准站,要达到高精度定位,大概每50 km需要设置1个差分站。同时,为了传输地面卫星差分基准站接收的卫星差分定位信息,还需要在地面卫星差分基准站与预警中心建立传输通道。采取卫星差分定位技术后,定位精度优于1 m,根据定位信息可以很容易识别出列车当前的运行线路、运行线别等。
4.3 车地无线数据通信方案
车地无线通信用于运行中的列车与预警中心之间的通信,实现列车定位信息、预警信息、差分定位信息的无线传输。适合车地无线数据通信的主要方式如下。
1)卫星通信
目前,北斗卫星导航系统具备短报文通信的能力。然而,对于山区、隧道等区域,卫星信号无法实现覆盖,则存在通信盲区,通信不可靠。
2)公众移动通信网
公众移动通信网提供短消息和通用分组无线业务(General Packet Radio Service,GPRS)两种通信方式。公众移动通信网同样存在信号覆盖不足的问题,通信可靠性不能得到保障。
3)铁路专用无线通信网
目前,所有铁路区段均设置有铁路专用移动通信系统,如GSM-R(GSM for Railw ay)通信系统等。GPRS是在GSM基础上发展起来的移动高速分组数据业务。GSM-R系统的GPRS网下行信道平均吞吐量大约为3~5 k By te/s,上行信道平均吞吐量大约为2~3 k By te/s。目前GPRS网络主要承载的调度命令信息无线传送、列车无线车次号校核信息传送和DM S信息传送等业务的容量约占系统容量的三分之一左右。
本系统的列车定位信息和预警信息数据量少,一般在几十By te/s左右;差分信息大概为200~300 By te/s。因此,GSM-R系统的GPRS网络完全有能力承担本系统的业务传输,可作为车地无线传输平台的首选方案。
5 列车安全行驶辅助预警子系统
5.1 子系统结构
如图3所示,列车安全行驶辅助预警子系统主要由预警中心、通信网络、车站预警接口3部分组成,预警中心配置有数据库服务器、应用服务器、通信服务器、G IS服务器和显示终端,并具有与列车调度体系中其他运行系统等的外部数据接口。
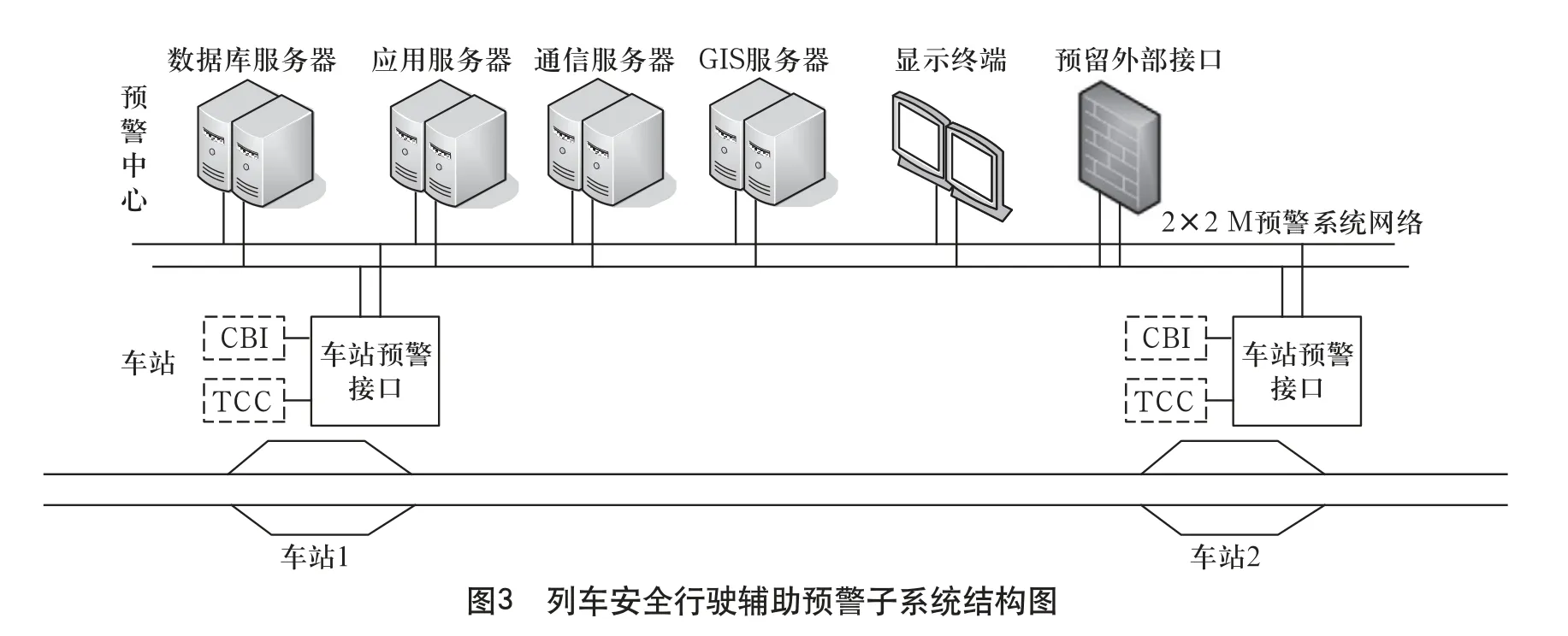
数据库服务器:接收从通信服务器传送来的列车运行实时信息和提供用户的各种共享信息,经整合处理并存在数据库中,并为各级应用服务提供相应的信息服务。
通信服务器:负责数据信息的整合和数据流的动态管理。其内容包括车-地信息转发、地-车信息转发、地-地信息转发。
应用服务器:完成对输入系统各项数据的综合处理,包括列车安全行驶的状态监控信息的获取、安全辅助预警计算、信息查询与统计等。
G IS服务器:存储铁路网络的地理信息数据,处理其他服务器发送的查询请求,进行空间地理数据分析等。
显示终端:负责以二维视图、三维视图等形式展示列车运行状态,实现可视化管理。
5.2 子系统功能
列车安全行驶辅助预警子系统的总体功能主要包括:基础信息管理、列车安全行驶监控、安全行驶辅助预警、信息查询与统计分析、人机交互界面、系统维护6个功能模块。各功能模块详细的功能结构如图4所示。
基础信息管理:形成列车安全行驶监控与预警基础信息数据库,对北斗信息、列车基础信息、机车基础信息及其他基础信息等进行整合与管理。
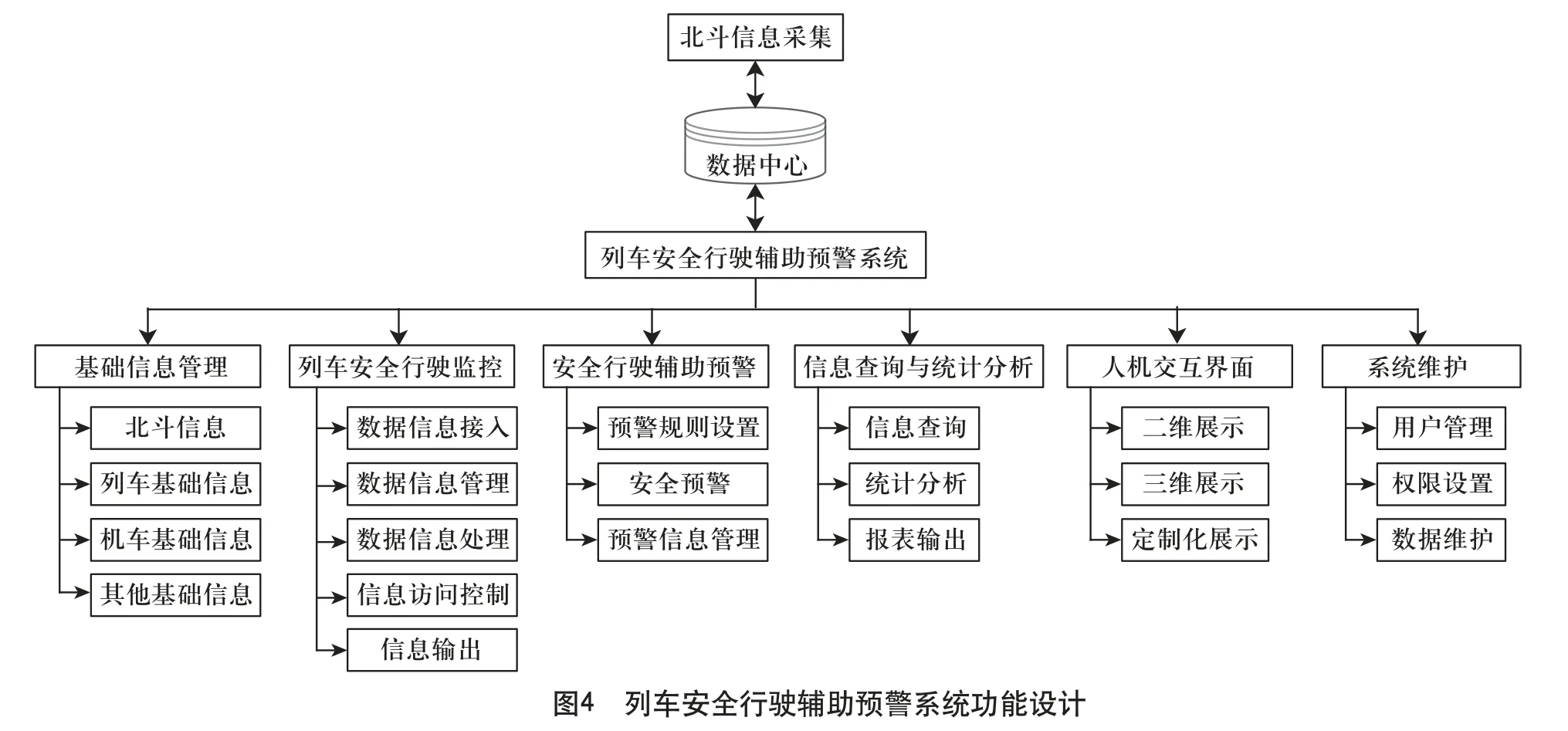
列车安全行驶监控:通过将列车车载终端设备获得的位置数据、以及其他系统相关数据信息接入列车安全行驶辅助预警系统中,并进行整合、集成、处理、管理等操作,实现列车安全行驶的实时监控。
安全行驶辅助预警:主要功能为预警规则设置、安全预警计算及提示、预警信息管理。通过建立列车安全行驶预警指标体系和模型,划分安全预警等级。预警中心根据列车运行位置信息对同一铁路正线运行的列车按照上、下行线路分别进行列车追踪预警计算,判断同一线别上相邻列车的距离。当发生越限、故障时,系统向司机发出安全预警提示。
信息查询与统计分析:对历史监控与预警信息进行分析统计,用户可以通过监控信息查询来获得所监控列车的在途行驶信息、运行状态、辅助预警评估和其他详细情况。
人机交互界面:在对北斗精确位置数据信息综合处理的基础上进行列车在途行驶运行状态的可视化展示,并为上级领导或列车调度体系中其他应用服务系统提供直观的视图展示和决策支持。
系统维护:包括用户管理、权限设置、数据维护3个功能,有效保障列车安全行驶辅助预警系统的安全性、稳定性和可扩展性。
6 结束语
本文提出的铁路列车定位及辅助预警系统独立于现有信号系统,不参与控车,通过北斗卫星实时接收列车的位置信息,当列车间距离达到预警条件时,系统向司机发出预警提示,防止列车追尾事故的发生。
系统应用取得丰富经验并验证了其可靠性,其中的定位信息可应用于我国铁路CTCS-4级列控系统,相关技术有助于搭建CTCS-4级列控系统雏形。同时,考虑在地理气象条件恶劣,人烟稀少,生活条件艰苦的线路得到推广应用,以减少轨旁设备的运营维护成本,提高系统可靠性。
[1]郑枫.北斗公众卫星导航系统民用化研究[J].中国智能交通,2009(1):86-87.
[2]李俊峰.“北斗”卫星导航定位系统与全球定位系统之比较分析[J].北京测绘,2007(1):51-53.
[3]于天泽.北斗卫星导航定位技术在我国铁路应用探讨[J].中国铁路,2013(4):4-7.
[4]中华人民共和国铁道部 铁路技术管理规程[S].2007.
[5] TG/03-2009 铁路客运专线技术管理办法(试行)(200~250km/h 部分)[S].
[6] TG/04-2009 铁路客运专线技术管理办法(试行)(300~350km/h 部分)[S].
[7]李杰.车载GPS/航位推算(DR)/电子地图组合导航系统[D].太原:华北工学院,2002.
[8]徐周.GPS差分定位技术及实现方法的研究[D].郑州:解放军信息工程大学,2006.
猜你喜欢
数学杂志(2022年5期)2022-12-02
湘潭大学自然科学学报(2022年2期)2022-07-28
小哥白尼(神奇星球)(2022年3期)2022-06-06
新世纪智能(数学备考)(2021年5期)2021-07-28
铁道通信信号(2020年1期)2020-09-21
当代陕西(2019年18期)2019-10-17
铁道通信信号(2018年10期)2018-12-06
太空探索(2016年12期)2016-07-18
太空探索(2016年3期)2016-07-12
中国铁道科学(2015年6期)2015-06-21