并联机器人在任务空间的非线性自适应控制
2014-05-10 06:53陈奕梅
天津工业大学学报 2014年3期
陈奕梅,张 强
(天津工业大学电气工程与自动化学院,天津 300387)
并联机器人在任务空间的非线性自适应控制
陈奕梅,张 强
(天津工业大学电气工程与自动化学院,天津 300387)
针对并联机器人系统本身的结构特点,在任务空间提出了一种非线性自适应控制方案.与已有的自适应控制方案相比,由于充分考虑了惯性矩阵中参数的特点,在设计中不再采取模型的不确定参数线性化的变换,控制律及自适应律的设计也因被估参数的减少变得较为简单.运用Lyapunov方法分析了系统稳定性并给出了系统稳定性条件.该方法能够保证系统的终端位置及速度的全局渐近稳定.最后,仿真结果验证了该方法的有效性.
自适应控制;非线性控制;并联机器人;任务空间;Lyapunov函数
并联机器人是由多条独立的运动链连接末端执行器和固定系统而形成的多闭环机构.它具有刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好等一系列优点,成为一个潜在的高速、高精度的运动平台.但由于并联机器人动力学模型复杂,且存在着强非线性耦合,因此并联机器人动力学建模、控制策略研究及其系统仿真是并联机器人研究的最具挑战性的领域之一,也是研究的难点之一.对于并联机器人的控制可以分为运动学控制及动力学控制.运动学控制依靠机器的运动学关系,不考虑机器人的动力学特性,如PID控制、非线性PD控制[1]以及基于人工智能的控制方案[2],该控制算法较简单、鲁棒性强,但由于并联机器人是一个非线性、强耦合系统,运动学控制在高度轨迹跟踪时效果较差.动力学模型考虑了机器人的动力学特性,所以非线性动态可以得到很好的补偿,在高速跟踪时控制效果较好.Liu[3]提出了一种基于几何映射的控制方法,尚伟伟[4]提出了增广非线性PD控制和计算力矩非线性PD控制.为了进一步提高控制精度,Kim等[5]针对Stewart平台提出了一种鲁棒控制方案,Vivas等[6]为H4并联机器人设计了一种预测控制器,张耀欣等[7]针对二自由度并联机构设计了最优控制器.然而,在动态模型建立时,系统的动态参数很难准确确定,因此,设计自适应控制器对提高控制精度有着很大的意义.然而,由于并联机器人本身模型的复杂性,自适应控制器的设计也较为困难,文献[8-9]在关节空间设计了自适应控制器,但由于跟踪轨迹都是在任务空间进行,需要求解运动学逆解,实现比较困难.文献[10]针对二自由度冗余并联机器人设计了任务空间的自适应控制器,较好地实现了机器人的自适应跟踪.本文利用基于控制Lyapunov函数的自适应控制器设计方法[11],针对并联机器人的任务空间设计了一种自适应控制器,该控制器在设计过程中通过对模型结构以及不确定参数特点进行分析,不再需要对模型进行参数线性化处理;同时,控制器以及自适应律由于被估参数量的减少,其结构也更加简单.
1 机器人动力学模型
具有冗余驱动的并联机器人在任务空间的结构如图1所示.
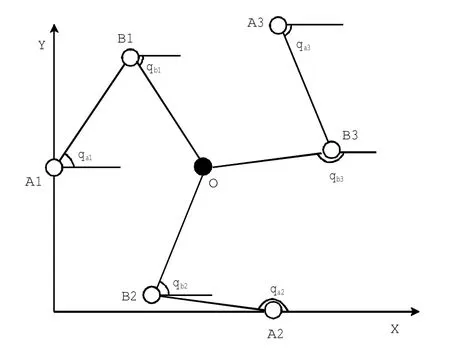
图1 机器人任务空间结构图Fig.1 Structure of parallel robot in task space
图1中:机器人由位于A1、A2、A3的3个伺服电机驱动;qa1、qa2、qa3分别为3个主动关节的主动角;qb1、qb2、qb3分别为3个从动关节的从动角.此装置包含了3个独立的二自由度装置,每个装置具有如下动态方程:

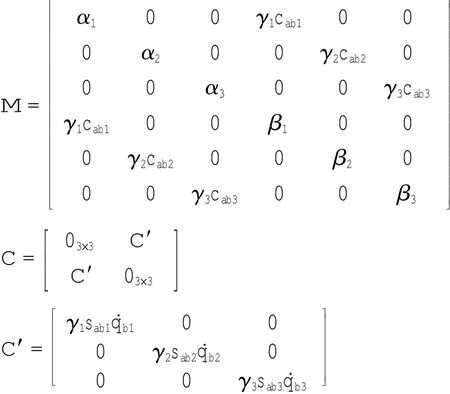
式中:qi=[qaiqbi]T;Mi与Ci分别为每个独立支路的惯性矩阵和离心力矩阵,表示为:

式中:Mi为正定矩阵;αi,βi,γi,i=1,2,3 为动态参数.这些参数由与系统的质量、质心、惯性等物理参数相关,并受测量精度的影响.τi= [τaiτbi]T为关节力矩向量,由于Bi为从动关节,因此τbi=0.fi=[faifbi]T为摩擦力矩向量,fai=sign(q˙ai)fci+fviq˙ai,与 fai相比,fbi非常小,可以被忽略.
并联机器人的动态模型为3个独立的串联机构在一定约束下的组合,建立如下形式[10]:

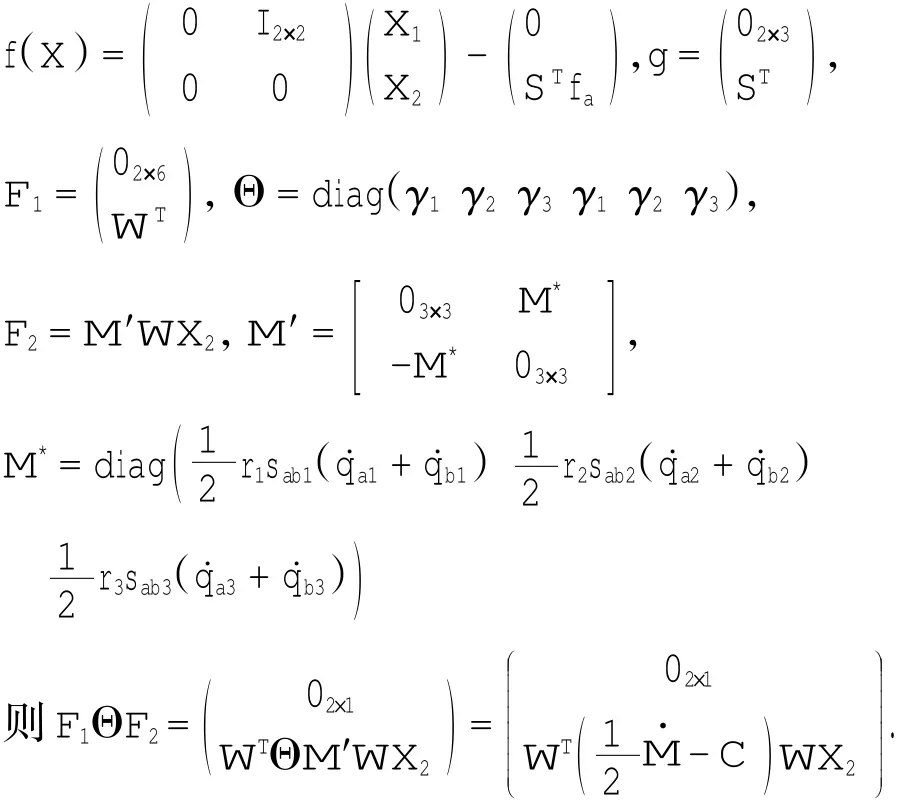
式中:qe=(x y)T为终端位置坐标,记cabi=cos(qaiqbi),sabi=sin(qai-qbi)系统的惯性矩阵和离心力矩阵M与C分别表示为:
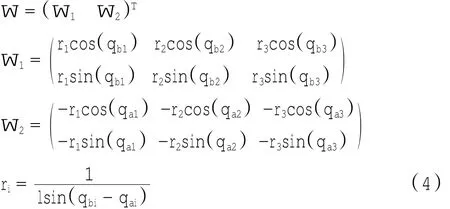
qe=(x y)T与节点关节角向量q=[qa1qa2qa3qb1qb2qb3]T之间满足关系:

W为节点速度与终端速度之间的雅可比矩阵,雅可比矩阵W可表示为
由于τbi=0且fbi非常小可以被忽略,因此(2)可以进一步表示为:

S为终端速度与3个关节的雅各比矩阵,表示为:

设 X1=qe,X2=,X=[X1TX2T]T,根据(5)式,建立并联机器人的动力学模型如下:

2 自适应控制器的设计
记
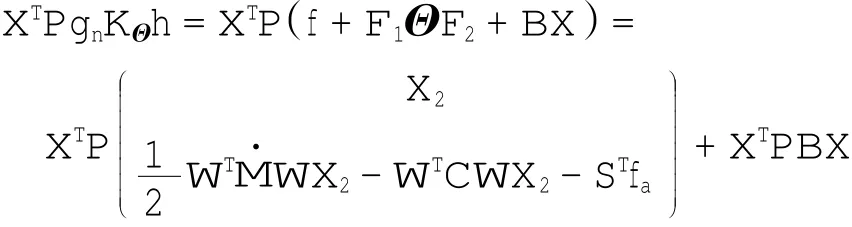
构造f*=f+NX.其中,N为选定矩阵,满足=-NX全局渐近稳定.取 gn=(I4×4F1),KΘ=,h=((f*)T)T,因此可以得到:



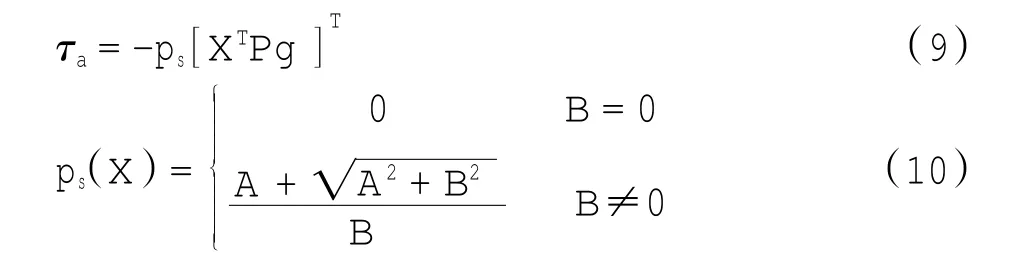
以及自适应律

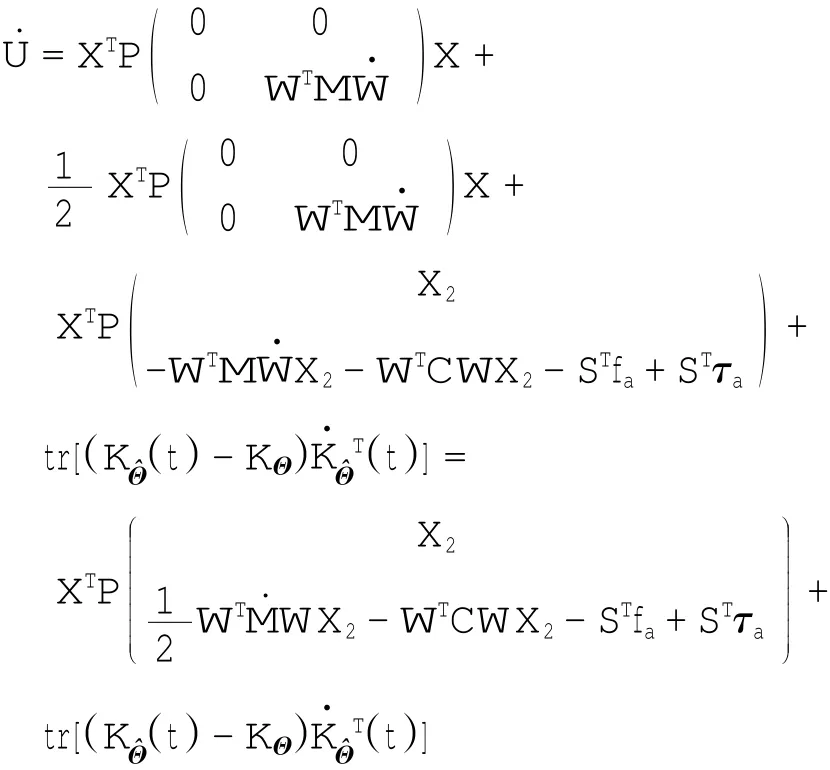
证明:构造Lyapunov函数如下:

则U沿系统(6)的导数为:

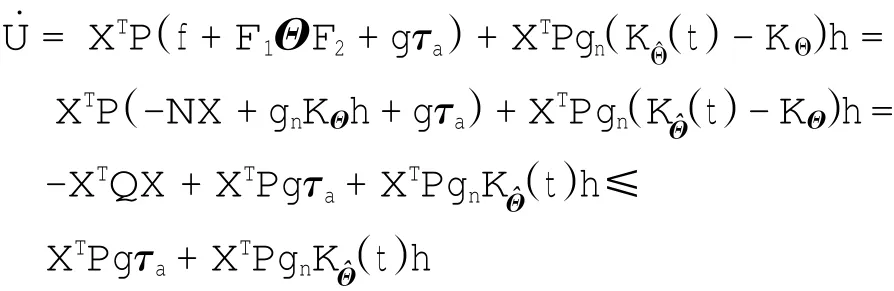
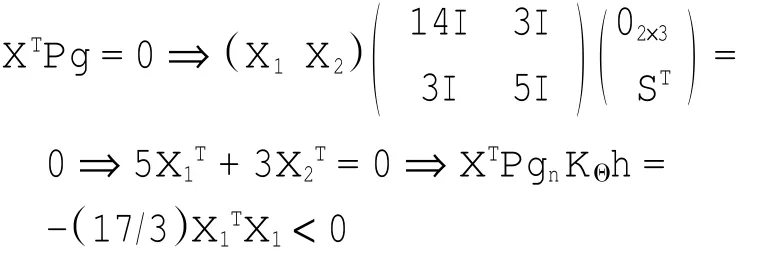
(1)当X≠0,XTPg=0时,由式(9)、式(10)可得 τa=0.由假设条件 XTPg=0 ⇒ XTPgnKΘh< 0,由于 XTPg不含有不确定参数γi(i=1,2,3)的任何信息,因此,KΘ中的不确定参数γi可取任意值.当取γi=?时,可得XTPg=0⇒XTPgnK(Θt)h<0,由此得到,当X≠0,XTPg=0 时,U˙< 0.
(2)当X≠0,XTPg≠0时,由控制律(9)、(10)得:


3 控制器参数的选择
可以得到:
此时,定理1中的条件成立,控制器中的正定对称阵P选定.从推导过程可以看出,该矩阵的选择不唯一.
在控制器中,没有关于对矩阵中参数αi以及βi的要求,事实上,对于 αi,βi,γi,i=1,2,3 参数的选择,只要满足Mi为正定,都能使系统实现平衡点的全局渐近稳定.
4 控制系统仿真
在仿真中,系统的参数选择如下[10]:所有杆的长度都相等l=0.244m;3个固定端的位置分别为A1(0,0.25),A2(0.433,0),A3(0.433,0.5);(α1,α2,α3)=(0.093 2,0.042 7,0.042 7)(kg·m2);(β1,β2,β3)= (0.038 1,0.008 5,0.008 5)(kg·m2);(γ1,γ2,γ3)= (0.042 6,0.011 1,0.011 1)(kg·m2);(fv1,fv2,fv3)=(2.993 6,2.761 7,2.877 1)(NS);(fc1,fc2,fc3)=(0.497 6,0.457 0,0.300 6)(NS);初始角度为(qa1,qa2,qa3)=(54°,174°,-66°),(qb1,qb2,qb3)=(-18°,48°,-174°);末端的初始坐标为 (x,y)=(0.289,0.25),控制目标末端状态为 X=((0.25,0.3,0,0)T;初始的参数估计为 ((0.005,0.005,0.005)(kg·m2).一般情况参数估计值的初值应选择最小的估计值,这样,可以确保 αi,βi,γi,i=1,2,3 使 Mi为正定成立.
图2和图3分别为目标位置及被估参数的仿真结果.
可以看出,尽管存在着不确定的参数值,但系统的目标位置仍然可以收敛到期望值,状态是渐近稳定的.而参数估计值与实际值还略有不同程度的误差,是Lyapunov意义下的稳定.
将本文的控制器与文献[10]相比,控制器与自适应器的结构较为简单,省略了复杂的参数线性化的处理过程,但如果对于参数αi,βi测量不准确时,缺乏一定的估计能力,因此,可在 αi,βi以及的初值的选择上选择一个保守的数值,即≤ αiβi,使 Mi为正定成立,以确保控制器的自适应稳定.
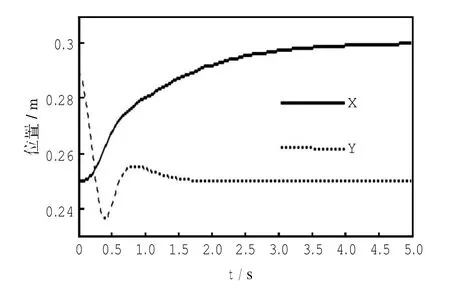
图2 执行器末端位置仿真结果Fig.2 Simulation of end-effector position
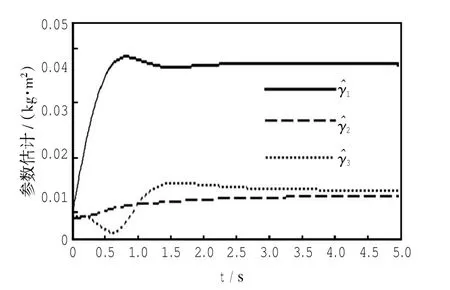
图3 参数估计值仿真结果Fig.3 Simulation of estimated parameters
5 结论
利用基于控制Lyapunov函数的自适应控制器设计方法,针对并联机器人的任务空间设计了一种自适应控制器,实现了系统状态的全局渐近稳定以及被估参数的Lyapunov稳定.根据系统自身的特点,在未对不确定参数 αi,βi进行估计的情况下,只要 αi,βi以及的初值的选择上选择一个保守的数值,便可确保控制器的自适应稳定.
[1]SU Y X,DUAN B Y,ZHENG C H,et al.Disturbancerejection high-precision motion control of a Stewart platform[J].IEEE Trans Control Syst Technol,2004,12(3):364-374.
[2]LI Q,WU F X.Control performance improvement of a parallel robot via the design for control approach[J].Mechatronics,2004,14(8):947-964.
[3]LIU G F,LI Z X.A unified geometric approach to modeling and control of constrained mechanical systems[J].IEEE Trans Robot Autom,2002,18(4):574-587.
[4]尚伟伟.平面二自由度并联机器人的控制策略及其性能研究[D].合肥:中国科学技术大学,2008.
[5]KIM H S,CHO Y M,LEE K I.Robust nonlinear task space control for 6-DOF parallel manipulator[J].Automatica,2005,41(9):1591-1600.
[6]VIVAS A,POIGNET P.Predictive functional control of a par原allel robot[J].Control Eng Pract,2005,13(7):863-874.
[7]张耀欣,从爽.平面二自由度冗余驱动并联机构的最优运动控制及其仿真 [J].系统仿真学报,2005,17(10):2450-2454.
[8]HONEGGER M,CODOUREY A,BURDET E.Adaptive con原trol of the Hexaglide,a 6-DOF parallel manipulator[C]//Proc.IEEE Int Conf Robot Autom.NM:Albuquerque,1997:543-548.
[9]SIROUSPOUR M R,SALCUDEAN S E.Nonlinear control of hydraulic robots[J].IEEE Trans Robot Autom,2001,12(2):173-182.
[10]SHANG W W,CONG S.Nonlinear adaptive task space control for a 2-DOF redundantly actuated parallel manipulator[J].Nonlinear Dyn,2010,59(2):61-72.
[11]CHEN Y M.Direct adaptive control for nonlinear uncertain system based on control Lyapunov function[J].Journal of Sys原tems Engineering and Electronics,2006,17(3):619-623.
Nonlinear adaptive control scheme for parallel robot in task space
CHEN Yi-mei,ZHANG Qiang
(School of Electrical Engineering and Automation,Tianjin Polytechnic University,Tianjin 300387,China)
A new nonlinear adaptive control approach is proposed for a kind of parallel robot.In comparison with the existing adaptive control schemes,the parameterization expression of the model parameters is not needed in the proposed approach according to the properties of the parameters in the inertia matrix,and the adaptive control is simpler because of the reduce of estimated parameters.The stabilized conditions and corresponding proof are also presented,and the globally asymptotical stability of the end-effector position is guaranteed.Simulation results are demonstrated in support of the proposed control scheme.
adaptive control;nonlinear control;parallel robot;task space;Lyapunov function
TP271.72
A
1671-024X(2014)03-0055-04
2014-01-09 基金项目:天津市应用基础及前沿技术研究计划(11JCYBJC07000)
陈奕梅(1972—),女,博士,副教授.E-mail:chenyimei@tjpu.edu.cn
猜你喜欢
空气动力学学报(2022年4期)2022-08-23
舰船科学技术(2022年11期)2022-07-15
黑龙江大学自然科学学报(2022年1期)2022-03-29
中学生数理化·中考版(2021年10期)2021-11-22
自动化学报(2019年6期)2019-07-23
自动化学报(2017年11期)2017-04-04
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
自动化学报(2016年8期)2016-04-16
通信电源技术(2016年5期)2016-03-22