基于FPGA的多波束实时动态聚焦波束形成方法
2014-05-25 00:34李海森
振动与冲击 2014年3期
李海森,鲁 东,周 天
(1.哈尔滨工程大学水声工程学院,哈尔滨 150001;2.哈尔滨工程大学水声技术重点实验室,哈尔滨 150001)
基于FPGA的多波束实时动态聚焦波束形成方法
李海森1,2,鲁 东1,2,周 天1,2
(1.哈尔滨工程大学水声工程学院,哈尔滨 150001;2.哈尔滨工程大学水声技术重点实验室,哈尔滨 150001)
提高多波束测深系统的综合精度,不仅需要提高远场精度,近场精度也不可忽视。针对常规多波束测深系统中采用远场近似模型,使得近场精度急剧下降的不足,研究了基于FPGA的多波束实时动态聚焦波束形成(RT-DFBF:Real-time Dynam ic Focused Beam-forming)方法。该方法引入相移聚焦波束形成,论证其在多波束测深系统中解决近场问题的可行性,同时深入分析各个影响因素的实时处理情况,提出了一种基于FPGA的实时处理结构,该结构在输入通道为80个、采样率为28 kHz、波束数为128个的条件下完成RT-DFBF。水池实验结果验证了该方法的实时性、有效性和实用性,具有重要工程应用价值。
多波束;实时动态聚焦波束形成;RT-DFBF;FPGA;实时
我国大部分的海域都属于浅海,浅水多波束测深系统中近场动态聚焦波束形成已成为必然趋势。对于近场聚焦波束形成国内外学者做了较多的研究。在超声成像方面Kim等[1]提出了PSDF(Pipelined-Sampled-Delay-Focusing),对不同通道非均匀采样实现动态聚焦,Gurun等[2]则采用可调模拟延时来实现动态聚焦,但两种方法的效果在聚焦波束的数目增加时大打折扣。而Freeman等[3]提出了SDO(Sigma-Delta Oversampled)方法,该方法利用sigma-delta信号的高采样率特性实现精确延时,利用其单Bit特性降低计算的复杂度,但sigma-delta芯片通常需要特殊定制,其广泛应用则受到了限制。在声纳领域,周泽明等[4]提出了基于信号相位匹配的聚焦方法,周天等[5]提出了近场条件下的超分辨的聚焦方法,陈欢等[6]提出了基于幅度补偿的MVDR水下噪声源近场定位识别方法,以上算法都属于高分辨算法,具有较高的精度,但运算量巨大限于理论仿真阶段,并未实时实现。
近场动态聚焦在Murino等[7]的文章已经提及,但其运算量巨大,实时处理难度大,学者们不得不采取各种方法折衷处理。谌颖等[8]就提出了将阵列划分为小子阵,在子阵中采用远场近似条件,减轻近场聚焦的计算量,实时性提高了,计算误差也会变大。杨长根[9]为了实时实现图像声纳的动态聚焦,采用了15个焦点的分段近似的方法,实时性虽然得到了很大的提升,但聚焦误差仍然很大。
随着海底地形测量质量和效率要求的提高,传统远场近似模型和和非实时动态聚焦的理论仿真已不能满足目前的需求。本文在深入研究了各种聚焦波束形成的方法之后,结合浅水宽覆盖测深系统的具体要求,提出了一种实现RT-DFBF的方法。为同时满足实时性和动态聚焦精度,在存储器资源与逻辑资源的利用率之间做了折中。并论证了RT-DFBF解决多波束测深系统近场测深精度的可行性;进一步分析了RT-DFBF的计算量和实时计算对硬件的需求;提出了基于FPGA的实时实现结构和方法;最后通过理论分析和水池实验验证了该方法的实时性和有效性。
1 算法分析
1.1 理论模型
在常规多波束测深系统中,设r为目标离阵元中心的距离,D为基阵的孔径大小,λ为接收信号的波长,为简化计算,通常采用远场假设,但只在r≫D2/λ范围有效[10]。在浅水多波束测深系统中,近场测量时,再沿用常规远场假设的波束形成方法将导致测深误差变大甚至错误。设阵元数为M的等距线阵,各阵元指向性相同,阵元间距为d,K(K<(M/2))个近场窄带信源,到达方向分别为θ1,…,θK,τmk是信源k在阵元m[-(M/2)+1≤m≤(m/2)]与阵元0之间的相位差,在文献[5]中提到可由Fresnel近似得到如下公式:

式(1)中rk是信源k与阵元0的距离,可表示为rk=0.5Nc/fs,其中N为采样点号,fs为采样率。设阵元m的回波信号经过放大、滤波、数模转换和正交变换后的复信号为Vm,则θk方向上时域波束形成结果V(θk)的公式[11]如下:

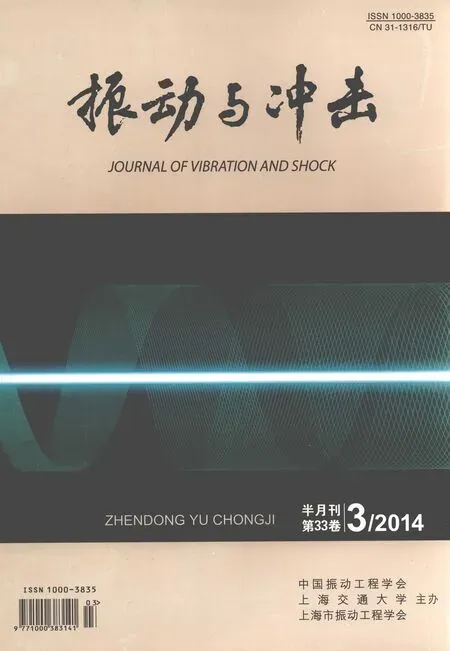
为了验证近场情况下常规波束形成与聚焦波束形成的区别,本文基于fieldⅡ软件进行仿真研究,假设信号频率fsigmal=180 kHz,阵元间距d=4.17 mm,阵元数M=80,目标距离r为0.5 m到10 m,角度为-15°、0°和15°共计30个目标点。对回波信号分别进行常规波束形成和动态聚焦波束形成,两种处理结果对比效果如图1所示。在图1中可以看出对于常规波束形成而言,离基阵越近,目标越模糊,甚至不能分辨三个目标,但对于动态聚焦波束形成而言,从0.5 m到10 m的范围内,都比较清晰,能清晰的分辨开每一个目标点,说明了动态聚焦的有效性。
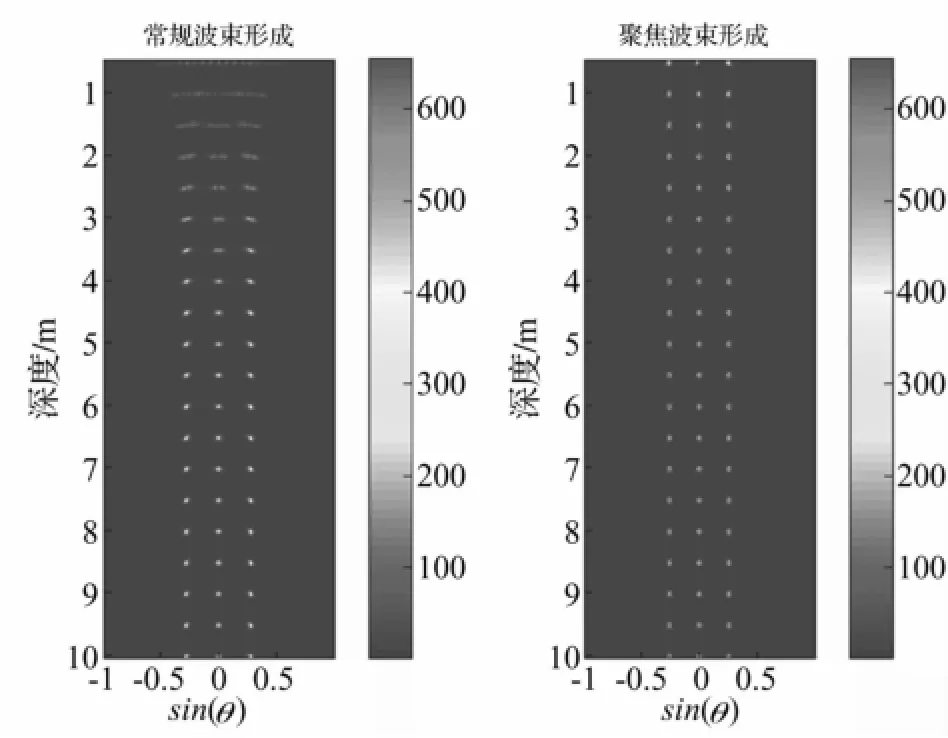
图1 常规与动态聚焦波束形成对比Fig.1 Comparison of conventional beam-form ing and dynamic focusing beam-forming
为了更清晰地看到动态聚焦的效果,从图1中取出深度为2 m的时间片,如图2所示。在图2中可以看到常规波束形成结果,很难清晰的分辨回波角度,但动态聚焦波束形成结果却能较好的分辨目标的方位。同时观察图2,常规波束形成的能量的聚集程度也远不如动态聚焦。证明了动态聚焦波束形成解决多波束测深系统近场测深精度的可行性。但分析前面式(1)和式(2)可以发现,为计算单个采样点各波束的各通道之间的时延,需要计算1次正弦和余弦,同时还会涉及多次乘法和加法,更为重要的是不可避免的遇到除法运算,因此DFBF算法运算量十分庞大。为了量化分析运算量的大小,本文通过Matlab仿真,统计600个采样点的计算时间,得到计算单个采样点数据的时间为19.5ms,这对于多波束系统中的实时处理来说是不可想象的(其中电脑处理器为Intel(R)Core(TM)i5-2450MCPU@2.50 GHz内存为2GB,操作系统为32位操作系统)。
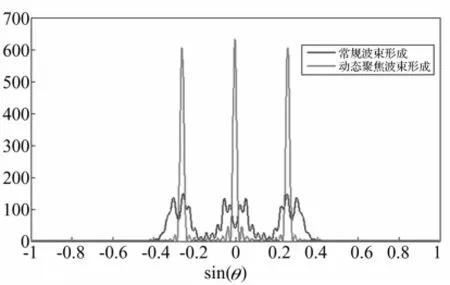
图2 目标在2m时常规与动态聚焦波束形成对比Fig.2 Target of 2m conventional beam-forming and dynamic focusing beam-forming comparison
1.2 实时实现分析
在浅水多波束测深系统中,信号频率和阵元数和上文中仿真参数一致,预成波束数为128个;经过带通采样、正交变换和降采样后采样率fs=28 kHz;波长λ=c/fsigmal;基阵长D=33.3 mm;近场距离r≫D2/λ≈13.3 m;近场条件下采样点号的最大值Nmax=2rfs/c=560;预处理后信号位宽为16 bit。
由采样率fs可知在35.7μs的时间里必须完成一个采样点数据的RT-DFBF。分析式(1)和式(2)可知涉及大量的复杂计算,这给实时计算带来了一定的难度,本文基于此做了大量的分析研究。分析式(1)可知rmk主要存在以下几个变量:rk,m和θk。从实时的角度考虑这个问题,可以用查表法和实时计算的方法。
查表法具有高速的优点,但需要存储128 mNmax个系数,则存储器容量需要91 Mbit,由于近场的实时处理时间为17.7 ms,则存储器的吞吐速度至少要达到4.5G bit/s才能满足要求,对于单片FPGA而言有一定的困难,即便是外扩RAM也需要32位宽,而且时钟速率需达到140 MHz以上才能勉强满足,当然也可以采用分段聚焦的方法[9]来降低对存储器的要求,但会损失一定的精度。
本文在不降低动态聚焦精度的情况下,对逻辑资源与存储资源之间做一定的折衷,提出如下的RTDFBF方法。根据实时处理需求,重写式(1)如下:
γk和φk由变量θk和一些常量计算而得,而θk在本系统中仅为128个,故把γk和φk事先计算存储在ROM里面,再参与动态聚焦的计算,这就需要256个系数,对于浅水多波束测深系统就仅需要256个系数空间,为使计算精度上有所提高,每个系数的位宽采用20位,则存储器仅需5.12 kbit,仅用FPGA内部存储就足够了。再考虑计算τmk就只剩下3个乘法,一个除法和一个加法,可以考虑完全采用逻辑来实时计算。相对于查表法而言,本文提出的方案优势十分明显,以较小的逻辑资源的代价换来了存储资源的极大降低。
在式(2)中,重点在于实时计算SIN和COS两个三角函数,再加上复数乘累加的过程。对于三角函数的计算,在合理评估其精度与逻辑资源占用量的基础上,本文使用CORDIC算法来实时计算三角函数。对于复数乘累加而言,由于其本身对逻辑资源的占用量巨大,考虑把输入数据串行起来计算。这就需要在一个采样周期里面,完成128×80=10 240次的乘累加。如果充分的使用流水线技术,保证数据每个时钟都能处理一次复数乘累加。这样系统时钟需大于1024×28 kHz= 286.72 MHz,如此高的系统时钟频率,对流水线的拆分技术要求比较高,较难实现。但是由于各个波束计算的过程相互独立,故可根据速度与面积互换原则加大面积来提高数据处理速度,在本文中可以复制两套完全相同的处理逻辑来实时计算,这样时钟速率只需大于143.36 MHz即可。
2 FPGA实时实现
在FPGA里面直接实现除N计算是比较困难的,即便是应用Altera的IP核,充分采用其流水线技术,在该款FPGA中时钟频率最高也只能达到40 MHz左右,而成为了整个算法的瓶颈。但经过仔细分析可以发现本算法中N的变化速率仅为28 kHz,使串行化计算N成为了可能。本文将除N变为乘65 536/N再右移16位的运算,而65 536/N可以采用串行除法器来实现。65 536/N运算需要20个时钟,因为N的变化速率为28 kHz,因此系统时钟仅需达到560 kHz即可满足要求,然而串行除法器模块由于其操作仅需移位、判断加减等简单操作,其速度在FPGA实现时里面可以达到180 MHz左右,完全满足本文的需要。为实时计算τmk,在FPGA中构造实时计算结构如图3所示。其中m计数器循环产生0到79的通道信号,通过m平方器与φkROM的预存数据相乘,其结果乘上65 536/N,再简单左移16位即可得到m2φk/N,同时m计数器的输出,直接和γkROM的预存数据相乘即可得到mγk部分,两部分相加即可得到τmk。
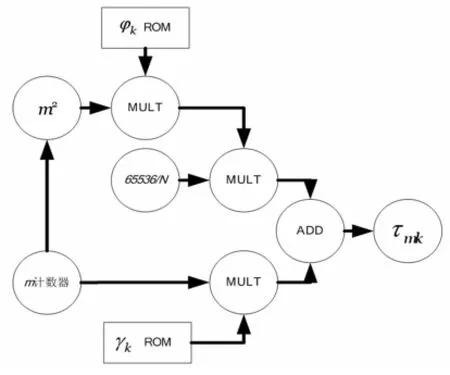
图3 τmk实时计算结构Fig.3τmkReal-time computing architecture
一旦τmk实时处理后,式(2)的正弦和余弦计算也必须实时处理,综合考虑实时和精度问题,本文采用18次迭代的CORDIC算法。将τmk结果送入到CORDIC处理模块中,经过迭代运算产生对应的正弦和余弦,然后与串行输入的原始数据进行复数乘法运算,最后由累加器得到波束形成结果,具体结构如图4所示。考虑到FPGA内部的时序问题,将系统工作的主时钟定到150MHz,并将图4的逻辑复制两套并行计算,即可达到系统的指标要求。
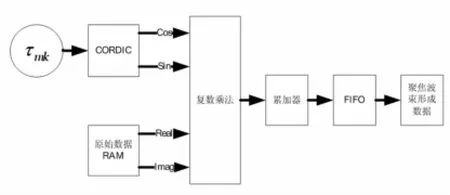
图4 RT-DBFB结构Fig.4 RT-DBFB architecture
经过前面的分析,本文中的FPGA采用Altera公司的Stratix II系列的EP2S130F1020C5,该款FPGA包含106 032个ALUT,674 784 0 bit存储器和504个DSP运算单元。
3 实现结果验证
3.1 精度验证
通常情况下,在FPGA里面进行浮点处理,会消耗大量的逻辑单元,同时也会导致最大系统时钟频率下降,故在FPGA里面通常只做定点计算。本文所提算法均采用定点计算,但这势必会引入定点舍入误差。分析发现本算法的主要误差来源于以下几个方面:两个ROM计算后保留为定点引入的舍入误差;引入流水线除法器做整数除法引入的误差;τmk计算完成后位数较多,需舍掉部分低位才能输入到CORDIC模块中,引入了舍入误差;CORDIC算法采用了18次迭代处理,也会引入误差。通过对算法中的各个波束和近场范围内的所有采样点的定点和浮点模型进行仿真,并对结果进行对比分析,发现在计算正弦部分时的最大误差为1.680 2E-005,而计算余弦时的最大误差为1.603 0 E-005。由于RT-DFBF对幅度要求不是很严格,故该定点模型完全满足需求。
为验证以上结论,在Matlab中仿真在20°方向,距基阵5 m处有点目标的情况,分别经过浮点和定点模型,处理结果如图5所示。在图5中,上图把双精度浮点结果和定点结果画到一张里面,其中蓝色实线代表浮点结果,红色星线代表定点结果,可以发现,基本重叠在一起,角度都精确的指向20°方向。然后把定点与浮点结果做差得到定点误差图如图5的下图,可以发现最大的误差为3E-3。由于在地形测量中往往关心的是角度和时间的准确率,而对幅度的准确率要求较低,所以本定点模型是有效的。

图5 定点与浮点对比图和定点误差图Fig.5 Fixed-point and floating-point comparison chart and fixed-point error p lots
3.2 实时性验证
波束形成器的逻辑部分采用FPGA实现,由于逻辑部分可控性较强,该部分的时钟采用150 MHz,通过QuestaSim6.5a仿真可知,波束形成器处理一个采样点数据需要5160个时钟,共耗费时间34.4μs,满足采样率为28 kHz,采样间隔为35.7μs的设计要求。
在Quartus II 10.1中经过Synthesis、Fitter和Assember,由全编译后的报告可知,波束形成器的逻辑部分,需要占用的资源为12个M4K,3744个ALUT,110个DSP单元。经过TimeQuest时序分析可以得到系统时钟频率最大可以达到177.15 MHz,相对于150 MHz的系统时钟而言,完全满足系统设计要求。由此证实了该方法的实时性,同时该方法所占的逻辑资源和存储资源相对较少,易于工程实现。
为对比说明本文方法的实时性,将动态聚焦方法在DSP器件TMS320C6713-300 MHz上编写同参数,同功能的DSP处理代码,通过CCSV3.3仿真可知计算单个采样点数据时需要9 476 925个时钟周期,计算时间约为31.6ms。而本文方法在计算单个采样点时,只需34.4μs,处理速度相对TMS320C6713-300 MHz提高了918倍,由此可见本文方法的实时优越性。
3.3 实用性验证
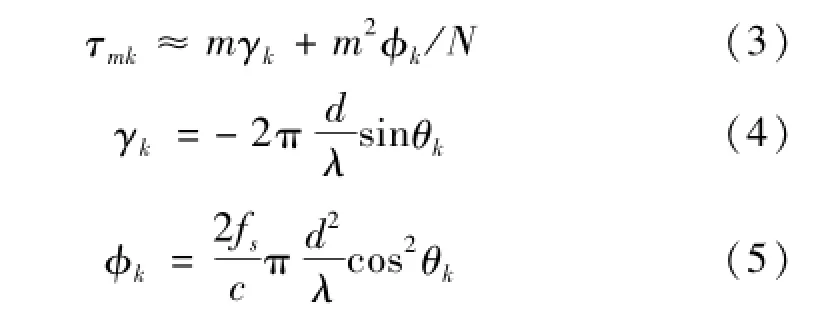
为验证RT-DFBF的实用性,分别采用分段聚焦方法[9](20个焦点)、分段分级聚焦方法[8](20个焦点)和常规波束形成在10m范围内对正下方目标进行波束形成,并以DB图的形式对比如图6所示,其中分段聚焦方法采用了20个焦点,聚焦波束形成产生128个波束;分段分级聚焦方法采用了20个焦点,每10个阵元一组,分为8组,第一级远场近似时波束形成产生80个波束,第二级聚焦产生128个波束。从聚焦精度上来看,RT-DFBF>分段聚焦>分段分级聚焦>常规波束形成。而从实时处理时所需的存储器来看,RT-DFBF需存储256个系数,分段聚焦方法需要存储204800个系数,分段分级聚焦方法需要存储21120个系数。同时从所需的逻辑资源来看,RT-DFBF比分段聚焦多一个τmk计算结构,而在计算一个采样点时分段聚焦比分段分级聚焦多2 816次复数乘法运算,分段分级聚焦比常规波束形成多7 424次复数乘法运算。由此可说明本文方法在不损失聚焦精度的情况,以较小面积的计算结构换取了大量的存储器,有较强的实用性。
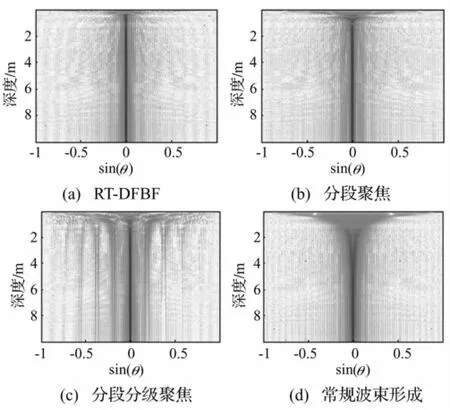
图6 RT-DFBF、分段聚焦、分段分级聚焦和常规波束形成对比Fig.6 RT-DFBF、sectionalize focusing beam-forming、sectionalize and stepped focusing beam-forming、conventional beam-forming comparison chart

图7 浅水多波束测深系统和目标小球Fig.7 Wide coverage shallow water bathymetry and the target ball
同时将该方法应用到图7左图中的哈尔滨工程大学的浅水宽覆盖测深系统中,并以图7右中直径为13 cm的空心小球作为目标。在距离基阵声中心0.4 m到5.6 m范围内设置14个观察点,每个点均以0.15 ms的180 kHz脉冲信号进行照射。为了分析方便,将14次常规波束形成的结果合成到图8的左侧,将RTDFBF结果合成到图8的右侧。在图8中,对比左右两图可以清晰地看出左图在0.5 m 2.5 m范围内基本不能清晰地分辨目标,而右图的RT-DFBF结果仍能非常清晰地分辨目标。同时可以验证在2.5 m 5 m范围内,RT-DFBF的幅度仍然高于常规实时波束形成,由此可见RT-DFBF在近场范围内有着较好的实用性。

图8 常规波束形成与RT-DFBF对比Fig.8 Comparison of conventional beam-forming and RT-DFBF
由图8中可以清晰的看出RT-DFBF随着深度的减少,波束宽度明显优于常规方法。对于多波束测深系统而言,能量越集中,波束宽度越小,目标分辨力越强,精度越高,由此证明了RT-DFBF在浅水宽覆盖测深系统中的实用性。
4 结 论
本文基于哈尔滨工程大学浅水宽覆盖测深系统的需求,提出了一种实时计算动态聚焦波束形成的方法,该方法在不损失算法精度的条件下在FPGA上实现了RT-DFBF,同时在逻辑资源和存储资源的使用率上取得了较好的平衡。本文首先通过对该方法进行定点误差分析,证实了该方法的有效性,其次用QuestaSim进行功能验证,用TimeQuest进行时序分析,并和DSP的实时计算做对比分析,证实了该方法的实时性。最后将该方法应用到实际浅水宽覆盖测深系统中,经过水池实验验证了该方法的有效性和实用性,具有在其他类似声纳系统中推广的应用价值。
[1]Kim JH,Song T K,Park SB.A pipelined sampled delay focusing in ultrasound imaging systems[J].Ultrason.Imaging,1987,9:75-91.
[2]Gurun G,Sisman A,Zahorian Z,et al.A tunable analogdelay element for high-frequency dynamic beam form ing[J].IEEEUltrasonics Symposium,Sep,2008:345-348.
[3]Freeman SR,Quick MK,Morin MA,et al.Delta-sigma oversampled ultrasound beamformer with dynamic delays[J].IEEE Trans.Ultrason.Ferroelectr.Freq.Control,1999,46:320-332.
[4]周泽明,杨鹏飞,陈 羽,等.基于信号相位匹配原理的聚焦波束形成算法[J].声学技术,2009,28(5):103-104.
ZHOU Ze-min,YANG Peng-fei,CHEN Yu,et al.Arithmetic of fcoused beamforming based on signal phase matching principle[J].Technical Acoustics,2009,28(5):103-104.
[5]周 天,李海森,么 彬.近场源定位算法在水声主动成像系统中的应用[J].武汉理工大学学报,2008,30(5):135-138.
ZHOU Tian,LIHai-sen,YAO Bin.Application of positioning algorithm for near-field sources in underwater acoustic active mapping system[J].Journal of Wuhan University of Technology,2008,30(5):135-138.
[6]陈 欢,何 良,杨德森,等.基于幅度补偿的MVDR水下噪声源近场定位识别方法研究[J].振动与冲击,2012,31(2):51-55.
CHEN Huan,HE Liang,YANG De-sen,et al.Underwater noise sources identification in near-field locating based on MVDRmethod with amplitude compensation[J].Journal of Vibration and Shock,2012,31(2):51-55.
[7]Murino V,Trucco.Underwater 3D imaging by FFT dynamic focusing beam forming[J].in Proc.1st IEEE Int.Conf.Image Processing,vol.I,Austin,TX,Nov,1994:890-894.
[8]谌 颖,叶青华,黄海宁.采用分级聚焦波束形成的快速声成像算法[J].应用声学,2008,27(3):207-210.
CHEN Ying,YE Qing-Hua,HUANG Hai-ning.A fast imaging algorithm usingmultistage-focusing beamforming[J].Applied Acoustics,2008,27(3):207-210.
[9]杨长根.基于FPGA的声成像算法研究与实现[D].哈尔滨:哈尔滨工程大学,2009.
[10]邬燕和.三维成像算法在并行系统上的实现研究[D].哈尔滨:哈尔滨工程大学,2000.
[11]李家彪.多波束勘测原理技术与方法[M].北京:海洋出版社,1999:38-39.
Multi-beamreal-time dynamic focused beam-form ing method based on FPGA
LIHai-sen1,2,LU Dong1,2,ZHOU Tian1,2
(1.College of Underwater Acoustic Engineering,Harbin Engineering University,Harbin 150001,China;2.Key Lab of Underwater Acoustic Technology,Harbin Engineering University,Harbin 150001,China)
To increase the synthesized accuracy of amulti-beam sounding system not only requires to increase farfield accuracy,but also to raise near-field accuracy.Adopting a far-field approximation model in a multi-beam sounding system makes the near-field accuracy sharply drop.Here,themulti-beam real time dynamic focused beam-formingmethod was proposed based on FPGA.With the method the phase shifting focused beam-forming was introduced,and its feasibility to solve the near-field problem in a multi-beam sounding system was verified.Meanwhile,the real time processing of each influential factorwas analyzed deaply,and a real time processing structurewas proposed on the basis of FPGA.RT-DFBF in conditions of 80 input channels,sampling rate of 28kHz and 128 beams was completed with this structure.The pool test result testified the effectiveness and feasibility of the method.It was shown that the proposed method is valuable in engineering applications.
multi-beam;real-time dynamic focused beam-forming;RT-DFBF;FPGA;real-time
TB51+6
A
国家863计划资助项目(2007AA09Z124,2008AA092701);国家科技部国际合作计划资助项目(2008DFR70320);国家自然科学基金(41006057,41076056,60872107);中国高等学校博士点基金项目(20102304120028,20112304130003,20122304120012);水声技术重点实验室基金项目(9140C200105120C20001,9140C200403110C2002)
2013-05-03 修改稿收到日期:2013-09-17
李海森男,博士,教授,博士生导师,1962年5月生
猜你喜欢
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
今日农业(2021年21期)2021-11-26
新世纪智能(教师)(2021年2期)2021-11-05
数学小灵通·3-4年级(2021年9期)2021-10-12
教育周报·教育论坛(2021年21期)2021-04-14
成都信息工程大学学报(2021年6期)2021-02-12
小学生学习指导(低年级)(2020年10期)2020-11-09
舰船科学技术(2020年3期)2020-04-22
通信技术(2019年3期)2019-05-31
数学大王·中高年级(2017年2期)2017-02-08