
基于PLC及反馈电路的步进电机闭环控制系统改造
2014-06-06 06:03王晓瑜
机床与液压 2014年16期
王晓瑜
(1.西安建筑科技大学机电工程学院,陕西西安 710055;2.西安外事学院工学院,陕西西安 710077)
步进电机是将电脉冲转化为角位移的执行机构。步进驱动器接收到一个脉冲信号,就驱动步进电机按设定的方向转动一个固定的角度 (称为“步距角”)运行。脉冲个数与控制角位移量成正比,以此实现准确定位;脉冲频率与电机转速成正比,以此实现调速。步进电机因具有结构简单、可靠性高、成本低和无积累误差的特点,而广泛应用于各种开环控制。但当步进电机启动频率过高或负载过大时,易出现丢步或堵转的现象,停止时转速过高易出现过冲的现象,所以为保证其控制精度,必须加入反馈电路组成高性能的闭环控制系统。文中采用增量型编码器作为位置反馈器件对步进电机实行闭环控制改造,使其控制性能更为可靠。
1 系统总体方案设计
步进电机闭环控制系统原理如图1所示。
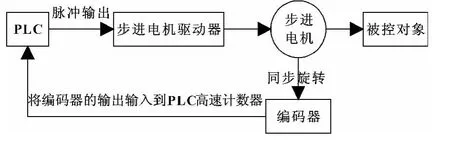
图1 步进电机闭环控制系统原理图
由图1可知,PLC的高速输出脉冲信号和方向信号,经驱动放大后送往步进电机,控制其工作;步进电机带动编码器同轴旋转,由编码器检测转角度,以脉冲的形式反馈到PLC的高速计数器;PLC根据脉冲反馈当量值与预定脉冲值进行比较,发出相应脉冲控制指令,从而实现步进电机转动位置的闭环控制[1-2]。
步进电机闭环控制系统由硬件部分和软件部分组成。硬件部分由PLC、步进电机驱动器、编码器和步进电机组成。软件部分由程序流程框图、主程序和子程序组成[4]。
2 硬件系统设计
2.1 PLC的选型[4]和I/O地址分配。
根据控制功能需求,该系统所需的I/O点数为8点开关量输入、3点开关量输出,综合考虑,选择西门子S7-200系列CPU224XPCN DC/DC/DC。I/O地址分配见表 1 和表 2[4]。
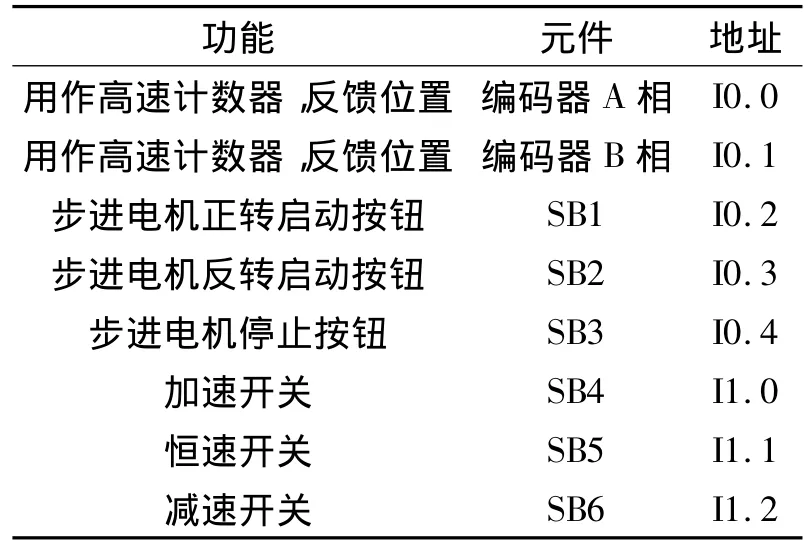
表1 输入信号地址分配表

表2 输出信号地址分配表
PLC端子接线图见图2。
2.2 步进电机驱动器的选型
该控制系统选用雷赛M415B步进电机驱动器。其供电电压为24 V DC,光隔离信号输入,具有1~64细分可选细分精度和电机噪声优化功能。该驱动器按照PLC发来的高速脉冲/方向指令 (每个脉冲将使电机移动一个基本步距角1.80°),对电机线圈电流进行控制,从而控制电机转轴的位置和速度[2-3]。
2.3 编码器的选型
该控制系统选用奥图尼克斯的E40S6-100-3-2-24增量式旋转编码器。其供电电压为24 V DC,为A、B、Z三线制NPN型输出。该编码器转轴旋转时,将旋转角度转换成周期性的电信号,再将电信号转变成计数脉冲,用脉冲的个数表示旋转角度的大小[2-3]。
2.4 步进电机的选型
该控制系统选用雷赛110HS12两相混合式步进电机,该电机的传动方式为两相四拍工作方式 (A—AB—B—BA),步距角为1.80°。
3 硬件系统接线图
硬件系统接线图如图2所示[4]。
4 软件系统设计
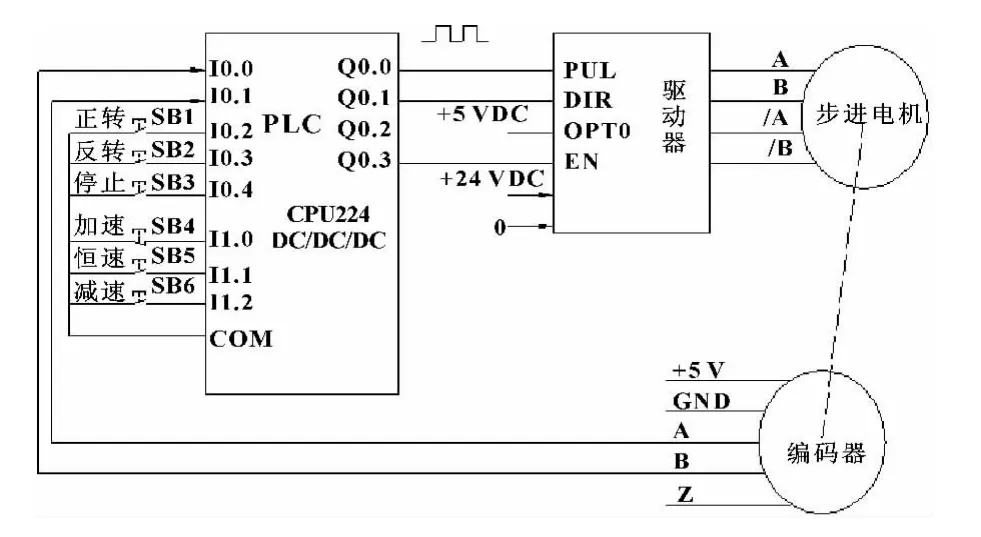
图2 硬件系统接线图
软件部分由程序流程框图、主程序MAIN、初始化子程序SBR-0、包络表子程序PTOSBR1和中断程序PTOINT组成。程序流程框图见图3。
开始→首次选择步进电机→正转或反转启动→移位寄存器赋初值→任选加速、恒速、减速中一个速度→发生移位脉冲→执行移位→移位输出控制步进电机→四拍计数到→移位寄存器赋初值→四拍计数未到→继续执行。
根据步进电机的闭环控制系统要求,结合PLC的I/O地址分配,编制梯形图,共有四部分。
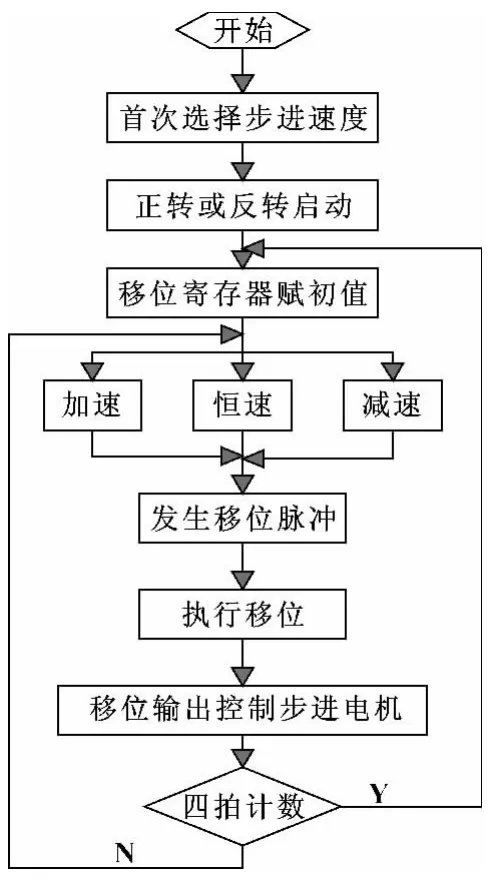
图3 程序流程图
程序设计中,主程序MAIN为PTO输出的三段脉冲管线方式,作用是复位高速输出,调用初始化子程序SBR-0;初始化子程序SBR-0作用是将包络表的起始变量装入包络表的首地址,同时调用包络表子程序PTOSBR1,当高速输出完成时,调用中断程序PTOINT,完成脉冲输出。
5 结束语
采用基于PLC及反馈电路的步进电机闭环控制系统设计,可得到比开环控制更高的运行速度,更稳定、更光滑的转速。控制系统结构简单、动态特性好、适应性强、速度快、精度高、性能稳定。采用编码器作为位置反馈,既能使步进电机达到伺服电机的高速度和高精度效果,又能降低成本,在各种车床、切割机、雕刻机等数控场合有较高的实用价值。
[1]秦常贵.基于PLC的步进电动机的正反转及调速控制[J].煤矿机械,2011,32(8):186-187.
[2]张前毅.一种提高步进电动机定位精度的方法[J].工矿自动化,2010,34(4):120-122.
[3]高琴,刘淑聪,彭宏伟.步进电机控制系统的设计及应用[J].制造业自动化,2012,34(1):150-152.
[4]西门子公司S7-200系列PLC软、硬件手册[M],2003.
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
测控技术(2018年1期)2018-11-25
电子制作(2018年11期)2018-08-04
课程教育研究·学法教法研究(2017年22期)2018-06-08
科学家(2015年12期)2016-01-20
中国科技纵横(2015年2期)2015-11-05
电测与仪表(2015年3期)2015-04-09
数字技术与应用(2014年8期)2014-12-13
科学中国人(2014年16期)2014-11-20
中国新技术新产品(2014年3期)2014-03-24
