基于ADAMS的一种六足移动机器人的设计与研究
2014-07-01 23:36王佳佳唐雪梅何小龙
机械工程师 2014年5期
王佳佳, 唐雪梅, 何小龙
(西南科技大学智能机器人创新实践班,四川绵阳621010)
基于ADAMS的一种六足移动机器人的设计与研究
王佳佳, 唐雪梅, 何小龙
(西南科技大学智能机器人创新实践班,四川绵阳621010)
针对复杂环境对机器人的移动要求,提出了一种新型六足移动机器人的设计思想。设计了机器人的主要结构,对该机器人的设计进行阐述,并分析了其越障构态的变化特点。用静力学方法对机器人进行了越障理论分析,建立了六足机器人参数化模型,经ADAMS对机器人进行机构运动仿真,获得了机器人运动学特性曲线,为机器人总体系统设计与数值计算提供了参考依据。
腿式机构;越障;性能分析;ADAMS
0 引言
移动机器人在航天、救灾、军事等领域应用广泛,常见的移动机器人可分为轮式、腿式和履带式3种,这3种型式都有各自的特点。轮式机构具有良好的机动性,履带式机构具有动载荷小、地形适应能力强的优点。轮、履式机器人由于结构简单、容易控制,并且轮、履驱动方式技术成熟,一直是机器人研究的主要方向[1]。但是足式移动机构具有轮式和履带式移动机构所没有的优点,足式机器人的足具有大量的自由度,使机器人可以相对容易地跨过较大的障碍,由于足式机器人运动灵活,使其具有较强的环境适应能力。目前国内外已经研究出了很多腿式机器人,例如:美国University of Michigan、UC Berkeley和加拿大McGill University共同研制的RHex仿生蟑螂机器人;俄罗斯研制的六腿探测机器人NMIIIA;德国研制的BISAM四足步行机器人;哈工大研制的复合运动模式四足机器人;上海交通大学研制的四足机器人JTUWM-III等。
传统的足式移动机器人往往存在结构复杂、车体重量大、移动速度慢等缺点,本文提出的一种新型六足移动机器人采用了对称式结构,兼有体积小、移动速度快、越障能力强等特点。对该机器人的结构设计进行阐述,用静力学方法对机器人进行了机构分析。通过ADAMS进行机构运动仿真,实现了机器人前进、后退、越障等多种运动方式,可为提高机器人的机构系统和复杂环境适应能力提供了理论依据,便于机器人进一步地优化设计与分析研究。
1 机器人机械结构分析
新型六足移动机器人的机械本体如图1,采用对称结构,由机身和两组结构相同的腿式机构构成。腿式机构由一个曲柄杆、3个腿杆和3个连杆组成,各系杆间通过转动副连接。机器人单侧腿式机械部分机构简图如图2所示,由电机带动曲柄转动实现步足的往复起落。按契贝谢夫平面机构自由度计算公式F=3n-2pl-ph,机器人单侧腿部机构系统共7个活动构件,10个平面低副,没有平面高副,得出腿部起落机构自由度为F=1,所以由一个电机带动机器人单侧腿部机构运动。整个机器人由两个电机分别带动两侧腿式机构,实现机器人的整体运动。

图1 六足移动机器人结构图

图2 机器人腿部机构简图
2 机器人越障过程的描述
机器人在复杂环境中行进,会遇到各式各样的障碍物。这些障碍物可以抽象地分为斜坡、台阶、凸台、壕沟、楼梯等5种类型,其中台阶式障碍(即垂直障碍)最为典型[2]。针对台阶式障碍进行分析,六足机器人越障过程分为三步,即前足越障、中足越障、后足越障。越障高度由车体和腿式机构协同作用决定。从本质上看,该六足机器人模仿的是“六足纲”昆虫,这类昆虫之所以能在地面上快速行进,主要是依靠其采用的三角步态,即在步行时把6只足分为呈三角形分布的两组,一组为支撑相,另一组则为运动相,两组交替,始终保证一组支撑虫体,而另一组使虫体前移,通过两组交替地摆动和支撑,实现昆虫的快速运动[3]。六足移动机器人正是基于这一仿生运动原理,依靠腿的协调动作来保持机身平稳从而适应复杂地形,机器人越障过程如图3。

图3 机器人翻越台阶过程分析图
3 机器人理论分析
首先,对机器人前足越障性能进行分析计算,如图4所示。
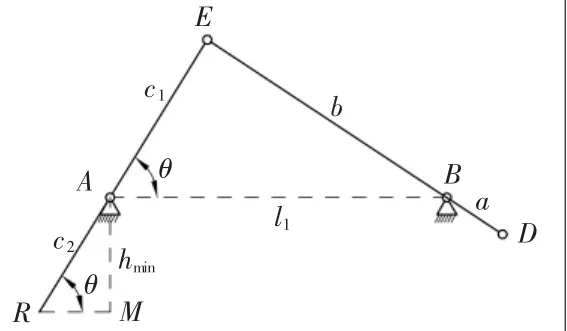
图4 前足分析图(足根位于最高处)
前足运动时,车板离地面的最小距离 hmin对应足长 c2的关系为:

根据三角函数关系得各尺寸间的关系为:


图5 前足分析图(足根位于最低处)

图6 中足分析图
中足不容易找出极限位置,于是采用解析法进行运动分析,求解出点S(x,y)的运动方程,如图6所示。
根据各构件位移矢量图,可写出位移矢量方程的两种形式为:

图7 中足矢量图

应用欧拉公式将式(7)的实部与虚部分离得:

先将l2相关项移至等号左边,等号两边取幅值即可消去φ3而求得φ2,并将a和l2的相关项作为整体leiφ1-lei0= leiφ看待,先求l和φ,该矢量是由C→D的矢量,则:

原位移矢量方程变为:

等号两边取模得:

以机构实际工作情况确定此式中的±号。

机器人后足越障性能与前足越障性能相同,后足越障分析参照前足越障分析。
4 机器人ADAMS仿真运动分析
应用Pro/E软件设计了1∶1的实体模型,导入ADAMS中对机器人进行机构运动仿真,台阶障碍高度都设定为50 mm。通过仿真不仅可以真实模拟机器人行进越障过程,同时对模型的参数化修改也将实现机器人结构的优化,从而指导机器人的结构参数改进的设计,仿真越障过程如图8(a)~(h)。最后进行综合评价与优化,得到了相对较优的设计方案,优化后的整车模型参数为:500 mm× 265 mm×140 mm。
六足移动机器人仿真中成功完成了下台阶、上台阶越障过程,如图8所示。并且得到了车体质心运动学曲线,如图9中(a)、(b)、(c)分别为机器人车体质心的位移、速度、加速度曲线,表示在外载荷作用下,机器人在台阶障碍且不受任何控制时,主车体的位姿的变化。

图8 机器人跨越台阶运动仿真过程图
5 结论
设计了一种六足移动机器人,对机器人进行了结构设计和分析计算。通过虚拟样机软件ADAMS对机器人模型进行了仿真分析,实现了机器人上下台阶的功能,验证了机器人较强的越障能力和环境适应能力。通过ADAMS内部强大的测量和曲线分析功能,获得了机器人的运动学性能参数,为机器人的设计、优化与运算控制提供了参考数据。上述结果可为提高机器人的复杂环境适应能力提供理论依据,为下一步的深入开发奠定了基础。

图9 机器人车体质心运动学曲线
[1] 崔星,许耀鹏,李思齐.四腿机器人步态控制与仿真研究[J].微计算机信息,2007,7(20):205-206.
[2] 田海波,方宗德,古玉锋.轮腿式机器人越障动力学建模与影响因素分析[J].机器人,2010,5(3):390-397.
[3] 罗庆生,韩宝玲,毛新,等.新型仿生六足机器人运动控制技术的研究与探索[J].机械设计与研究,2006,22(2):17-21.
[4] 乔凤斌,杨汝清.六轮移动机器人爬楼梯能力分析[J].机器人,2004,26(4):289-294.
[5] 黄博,王鹏飞,孙立宁.复合运动模式四足机器人机构设计及分析[J].机械设计与研究,2006,22(5):49-53.
[6] 郑建荣.ADAMS虚拟样机技术入门与提高[M].北京:机械工业出版社,2002:1-3.
[7] Siegwart R,Lamon P,Estier T,et al.Innovative Design for Wheeled Locomotion in Rough Te Rrain[J].Journal of Robotics and Autonomous Systems,2002,40:151-162.
[8] Tunstel E,Huntsberger T,Aghazarian H,et al.Fido Rover Field Trials as Rehearsal for the Nasa 2003 Mars Exploration Rovers Mission[C]//Proceeding of 5th Biannual World Automation Congress,2002:320-327.
[9] VNIITRANMASH.Specimens of Space TechNology,Earthbased Demonstrators of Planetary Rover,Running Mock-ups[R].Russian Mobile Vechicle Engineering Institute Research Research Report,2002:10-31.
(编辑立 明)
Design and Research of the Six-legged Adaptive Mobile Robot Based on the ADAMS
WANG Jiajia,TANG Xuemei,HE Xiaolong
(School of Intelligent Robot Innovation Practice Class,Southwest University of Science and Technology,Mianyang 621010,China)
According to the requirement of the motion of mobile robot in complex environment,the design thought of a new six-legged robot is made.The principal structure of the robot was designed and elaborated,and the change characteristics of the obstacle configuration was analyzed.A theoretical analysis of the robot obstacle navigation was presented by static method.The parametric models of the six-legged mobile robots and obstacles were built and the surmounting analysis of mobile robot was carried out,the dynamic characteristic curves of each body and whole body of the robot are eventually acquired,which provide theoretical foundation for design and numerical computation of the robot structure.
leg structure;obstacle crossing;performance analysis;ADAMS
TP 242
A
1002-2333(2014)05-0092-03
王佳佳(1992—),女,在读本科生,从事机构与虚拟样机学习研究。
2014-03-06
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
制造技术与机床(2017年3期)2017-06-23
股市动态分析(2016年23期)2016-12-27
股市动态分析(2016年7期)2016-09-29
股市动态分析(2016年4期)2016-09-29
股市动态分析(2016年29期)2016-08-04
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28