
基于机载LiDAR数据的建筑物点云提取*
2014-07-19 11:10李永强牛路标闫阳阳
河南城建学院学报 2014年1期
曹 鸿, 李永强, 牛路标, 毛 杰, 闫阳阳
(河南理工大学测绘与国土信息工程学院,河南 焦作 454000)
基于机载LiDAR数据的建筑物点云提取*
曹 鸿, 李永强, 牛路标, 毛 杰, 闫阳阳
(河南理工大学测绘与国土信息工程学院,河南 焦作 454000)
LiDAR技术是快速获取地面及地物三维数据的新型测绘技术,也是近年来进行城市三维建模的一种重要手段,而对建筑物的提取是城市三维建模的重要步骤。为了从原始机载点云中有效地提取出城市建模所需要的建筑物点云,在常用机载LiDAR滤波与点云分类思想的基础上,提出了结合面积与斜率两特征参数的区域增长算法,实现了高大植被与建筑物点云的有效分离,完成了建筑物点云的提取。通过设定合理的面积阈值与斜率阈值,结合具体的数据通过该算法获得了较好的提取效果,最后对提取方法及效果进行了客观分析与评价。
机载LiDAR;滤波;建筑物提取;区域增长
机载激光雷达技术是以飞机为探测平台的集激光扫描仪、全球定位系统(GPS)和惯性导航系统(INS)等技术于一体的主动获取地面地物空间信息的新型测量技术,该技术能快速大量地获取地形地物的空间三维信息。现今的机载激光雷达系统还装配了如CCD相机的成像装置,这样在数据中还包括扫面目标区域的光谱信息(如航空影像数据)[1]。机载激光雷达技术的原理为:激光器向地面发射激光脉冲,通过测量脉冲的往返时间来计算出传感器到地面或者目标物之间的距离,并获取地表及地表建筑物等设施的点云数据,结合激光发射处到目标的距离和GPS、INS的数据记录解算出被扫描目标的空间三维坐标。其具有工作效率高、获取信息丰富、全天候的特点,是目前继GPS技术之后测绘界的又一重大技术革命[2]。
机载激光雷达技术起初的目的仅仅是为了获取地形复杂或者难以接近测量的地区的数字高程模型DEM及测图成果。随着信息社会的不断发展,城市建设日新月异,“数字城市”概念的提出与建设应运而生,而其核心任务对城市建筑物的提取与三维重建一直是当今研究的一个热点,LiDAR技术相比于传统的测绘建模手段有着实时性强、数据量丰富、自动化程度高等明显优势[3]。利用机载LiDAR数据进行建筑物的特征提取及三维重建逐渐成为一种重要的手段[4]。
1 机载LiDAR原始数据预处理
机载激光雷达系统得到的原始观测数据主要包括原始激光点云数据(激光束的扫描角度、激光发射点到目标的距离、目标的回波次数、回波强度等),惯导数据,GPS数据以及数码影像数据[5]。在利用点云数据进行地物辨别与提取前需要对点云数据进行预处理,这包括对影像数据进行修正并完成对LiDAR系统设备与POS传感器的姿态参数的测定与检校[6],剔除异常点,转换坐标系以及匹配航带等方面的工作。数据预处理的目的是获得相应的空间坐标信息和姿态信息以完成LiDAR数据与影像数据的大地定向。
对原始机载LiDAR数据进行数据预处理,主要包括剔除异常点、转换坐标系、匹配航带等三个方面的工作:
(1)剔除异常激光点云。在航测飞机飞行过程中,由于系统电路、镜面反射等系统自身的影响与外界条件中高空遮挡物的影响,LiDAR原始点云往往存在异常点,该步骤主要是去除高于飞行高度和低于地面高度的异常点。
(2)转换坐标系。采集的LiDAR点云数据与航片的外方位元素所在的坐标系统均为WGS84坐标系,在测区范围内,通过比较城市局部坐标系与WGS84坐标系中的控制点,采用布尔萨七参数模型实现平面坐标系的转换,再结合城市的高精度水准数据,完成由WGS84坐标向该城市地方高程坐标系的转换。
(3)匹配航带。要完成机载LiDAR数据的完全采集,由于飞行角度与扫描角度等问题,飞行航线需要保持大约30%的重叠度,这样就造成航带与LiDAR点云之间不能很好的匹配,需要通过现有的点云处理软件对两者之间进行配准操作。
2 常用的机载点云滤波原理
机载LiDAR数据经过数据预处理后得到的是大量离散的激光点云,这其中包括地面点、建筑物点、植被点、水域点以及噪声点等,这些点云处在同一个数据层中,滤波即从原始点云中去除建筑物、植被等地物激光脚点,分离出地形表面的激光点[7]。这也是获取建筑物点云的必要步骤。
机载LiDAR点云数据的滤波方法按其原理大致可分两类:第一类是基于高程突变的原理;第二类是基于激光点的回波强度信息的滤波方法。其中基于高程突变的原理是应用较为广泛的滤波原理,其思想是:一般的地形变化是连续且缓慢平滑的,所以两点之间的距离越近它们之间的高差越小,如果在某局部区域出现高程突变的点,则一般认为该处发生了地物类型的变化,如存在树木或建筑物等地物。该原理认为高程较高的点为地物点,高程较低的点则为地面点。第二类滤波原理与航空影像的分类原理相似[8]:因不同类型地物具有不同的反射系数,所以各类型地物表面的激光点对应相应的激光强度信息,将激光强度转化为灰度图像,则不同地物类型对应不同的灰度值,这样通过分析测区灰度值的分布来确定出地面点的灰度值范围,从而将地面点从原始点云数据中分离出来。
常用的滤波方法是基于不规则三角网(TIN)来实现的[9],该滤波方法的基本思想是:首先选择出一些低点,并认为它们是地面点的初始点,将这些初始点构建成初始的不规则三角网,结合所采集地区的具体情况设置距离与角度阈值,然后对其余的点进行判断,如果某点到初始三角面的距离与角度值都小于设定的阈值,则将其划分为地面点,同时将该点加入到三角网中,然后对其余点继续判断,如此迭代下去,反复加入新的激光点以此向上扩建模型,每个加入的点会使模型更加贴近地表。直至非地面点集合中不存在满足距离与角度阈值的点为止。两个参数阈值的定义如图1所示。
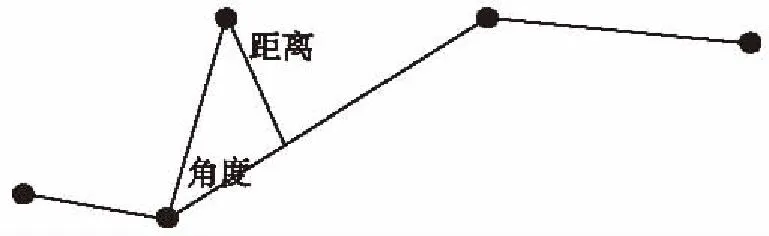
图1 不规则三角网中地面点的判断
两个参数在该算法中被称为“反复参数”。角度阈值是一个点和三角形的最近顶点的连线与这个三角形平面所构成的最大夹角值,该值越小说明该区域在竖直面上的起伏变化越小。距离阈值是指一个点到三角形中最近的那条边的距离的最大值,该参数能确保当三角形很大时,重复向上构建三角形没有大的跳跃,这有助于把低矮建筑物排除在模型之外。
3 建筑物点云提取
3.1 基于高程阈值的地物点点云分类
LiDAR原始数据经过滤波处理后分离出了地物点点云,这其中包括植被、建筑物、人工设施以及车辆等,在未分类的地表点中以分好的地面点云为界按照高程进行分类,设置合理的高程阈值分离出低矮植被以及人工设施,通常将高程阈值设置为2 m,通过比较点云的高程信息,将地物点点云按高程分为两大类,这样就得到了由高大植被、建筑物顶面及电杆等高程值大于2 m的混合点云。对于低于2 m的地物点云,通过设置合理的高度阈值并结合航空正射影像分别将其分类为低矮植被类、中度植被类以及人工设施等类别,并将其分类到相应的预先设置好的数据层中。一般将距离地面0~0.2 m的点云划分为低矮植被,距离地面0.2~2 m的点云划分为中等植被。
3.2 结合斜率与面积两特征参数的区域增长算法
在分离得到的混合点云中,建筑物周围既存在有高大树木等自然地物又有电杆路灯等高大的人工设施。它们只是在高程上具有相同的特征,此时通过高程阈值的分割方法很难将建筑物点云分割出来,但是建筑物顶面与树木电杆等地物在其它特征上还有着明显的区别:建筑物顶面相对而言形状特征较规则且面积较大,而高大植被与路灯电杆等设施却没有规则的外形,并且面积较小。对于平顶建筑物而言,这就导致了建筑物顶部的局部区域切平面的斜率接近为零,即使是复杂建筑物的屋顶该斜率值也远小于离散植被局部区域切平面的斜率值。因此结合斜率阈值与面积阈值这两个特征参数,提出了基于区域增长的算法。只有汇聚面积大于面积阈值,并且离散程度小于相应的斜率阈值的地物才被判断为建筑物,而不满足条件的则为高大植被或者电杆等人工设施。
其中,以待处理点云的8邻域作为局部区域,利用最小二乘法拟合出该局部区域的曲面方程,而在空间上,拟合曲面在某点云处的切平面斜率可用拟合曲面在该点云处的梯度公式来计算。
二次曲面的表达式为:
f(x,y)=ax2+by2+cxy+dx+ey+f
梯度公式为:
由此得到了衡量点云离散程度的斜率值,通过设置该参数的合理阈值,结合适当的面积阈值可以将建筑物点云数据从混合点云中分离出来。该算法的大致步骤如下:
(1)选择待处理点云左下方的点为种子点,在参数空间中建立一个3行3列的数组C,初始化该数组值为0,与面积阈值对应的数组统计阈值为N;
(2)依据最小二乘法的原理拟合出与数组C对应的局部区域的曲面方程;
(3)在拟合的二次曲面内,依次搜索并计算种子点及其周围的8邻域点云处的梯度值,并将各梯度值与斜率阈值进行比较;
(4)若某梯度值大于或等于斜率阈值则将该处点云所在数组C中对应的位置数值赋值为0,若小于斜率阈值将其对应于C中位置的数值赋值为1,比较完成以后,令sumC为数组C中的数值和,该值代表种子点所在局部区域的面积统计值,若sumC大于N,则该种子点为建筑物点,反之则其不是建筑物点;
(5)以从左到右、从下到上的顺序搜索下一个待处理点,重复步骤(1)、(2)、(3)、(4),直到所有点被判断完毕。
4 试验分析
结合具体的机载LiDAR数据,通过以上改进的提取算法,本文成功地分离出城市建模所需要的建筑物顶面点云(如图2所示)。面积阈值和斜率阈值这两个特征参数分别反映了地物点云的疏密和离散程度,通过结合两特征参数对现有的区域增长算法进行了改进,实际处理时,结合实际地形地物情况进行设置:斜率阈值为2.0,面积阈值为10(m2)。
(1)由图2的对比可以看出,根据本文的提取算法可以过滤掉绝大部分的树木及高大人工设施点云,这说明在按高程分类后的地物点点云中,基于离散程度与面积这两个明显特征将建筑物顶面点云从混合点云中提取出来是完全有效的、可行的。
(2)由图2a与图3影像图片的对比可以看出,该方法在滤除植被的同时有可能将建筑物的不规则边缘点及跃迁性大的点云错误地滤除,这是由于由这些点所拟合曲面的切平面斜率太大导致的。
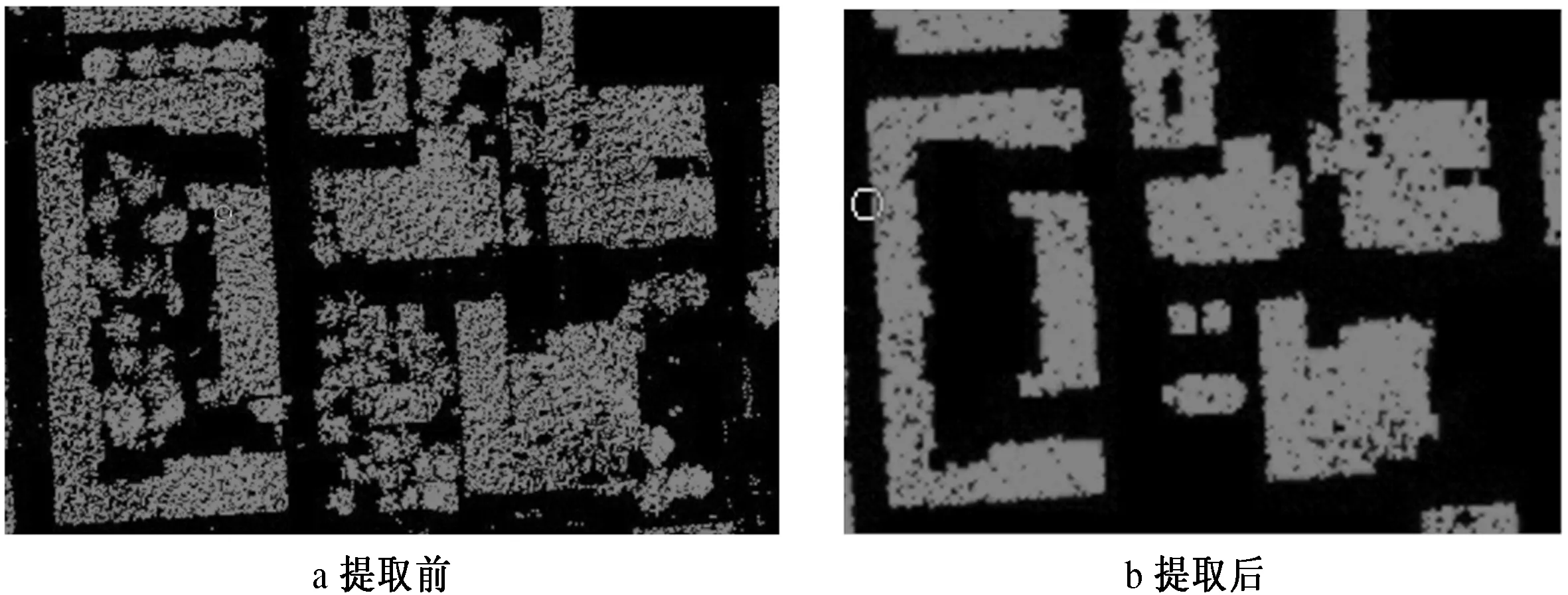
图2 提取前后的对比效果

图3 相应地区的航空影像

图4 提取前后的剖面图对比效果
(3)由图4的剖面对比图可以看出,有极少的噪声点没有被滤除,这是由于该局部区域的植被较密集且排列规则造成的,可以结合相应的影像图片进行点云去噪处理以获得更好的效果。
5 结论
本文通过阐述常用的机载LiDAR滤波与分类原理,提出了结合斜率阈值与面积阈值这两个特征参数的区域增长算法,并结合具体机载LiDAR数据运用该算法有效地提取出了建筑物顶面点云。试验表明,本文算法能滤除绝大部分的植被及高大人工设施点云,能满足建筑物点云提取的要求。此外,在处理含有不规则边缘点及跃迁点的建筑物点云时,会存在局部细节丢失的现象,因此该算法还有待于进一步改进,可以结合航空影像来弥补建筑物局部细节丢失的问题,进而为数字城市的三维建模工作服务。
[1] 窦爱霞,马宗晋,黄文丽,等. 基于机载LIDAR和多光谱图像的建筑物震害自动识别方法[J].遥感信息,2013,28(4):103-109.
[2] 戴永江.激光雷达原理[M].北京:国防工业出版社,2002.
[3] 李树楷,薛永祺.高效三维遥感集成技术系统[M].北京:科学出版社,2000.
[4] 吴俣.三维旋转激光扫描系统的设计与实现[D].北京:首都师范大学,2009.
[5] 赖旭东.机载激光雷达基础原理与应用[M].北京:电子工业出版社,2010.
[6] 刘俊卫,王树文. 基于机载 LIDAR 的 POS 检校与激光数据精度控制分析[J].测绘通报,2013(8):40-44
[7] 张小红.机载激光扫描测高数据滤波及地物提取[D].武汉:武汉大学,2002.
[8] 吴秀芸.基于高分辨率遥感影像的建筑物提取及轮廓矢量化研究[D].南京:南京大学,2011.
[9] 隋立春,张熠斌,张硕,等. 基于渐进三角网的机载LIDAR 点云数据滤波[J].武汉大学学报,2011,36(10):1160-1163.
Extraction of buildings based on airborne LiDAR point clouds
CAO Hong, LI Yong-qiang, NIU Lu-biao, MAO Jie, YAN Yang-yang
(SchoolofSurveyingandLandInformationEngineering,HenanPolytechnicUniversity,Jiaozuo454000,China)
LiDAR technology is a new mapping technology that has a fast access to the three-dimensional data of ground and surface features, it is also an important means to obtain 3D City Model In recent years, the extraction of the building is an important step in the 3D City Model Building. In order to effectively extract buildings point clouds which are necessary for the City Modeling Building from the original point cloud of airborne Lidar data, by introducing the common airborne LiDAR filtering and classification concept, This article puts forward a region growing algorithm of combining area and slope parameters to separate the buildings from the trees and complete the task of building extraction. Through setting reasonable thresholds of area and slope, this article obtains a better extraction effect, and makes an objective assessment for the method and the effect.
Airborne Lidar;Filtering;Building Extraction;Regional growth
国家自然科学基金资助项目(41001304);国家十二五科技支撑项目(2012BAH34B00);河南理工大学博士基金资助项目(B2009-33)。
2013-11-14
曹 鸿(1987-),男,河南杞县人,河南理工大学测绘与国土信息工程学院硕士研究生。
1674-7046(2014)01-0059-04
P23
A
猜你喜欢
河北地质(2022年2期)2022-08-22
当代陕西(2020年23期)2021-01-07
科学大众(2020年17期)2020-10-27
物理之友(2020年12期)2020-07-16
现代园艺(2017年23期)2018-01-18
福建中学数学(2016年7期)2016-12-03
光学精密工程(2016年1期)2016-11-07
电测与仪表(2016年6期)2016-04-11
安徽地质(2016年4期)2016-02-27
应用海洋学学报(2015年2期)2015-11-22
