
一类连杆机械手指屈伸动作的基本关系*
2014-07-24 10:20刚芹果
机械研究与应用 2014年4期
朱 晔,刚芹果
(河北大学 建筑工程学院,河北 保定 071000)
一类连杆机械手指屈伸动作的基本关系*
朱 晔,刚芹果
(河北大学 建筑工程学院,河北 保定 071000)
对一种刚性连杆机械手指的运动学条件进行了分析。该机构由一个曲柄连杆机构和两个四连杆机构构成推导出了该手指实现屈伸动作时各执行机构几何参数之间应满足的数学关系式,为今后设计此类机械手指提供理论依据。
机械手指; 屈伸; 几何参数关系
Abstract: The kinematics condition of a kind of rigid connecting rod mechanical finger which consisted of a crank rod system and two of four-bar linkage mechanism was studied. The mathematical relationship of the geometric parameters that the mechanical finger should fulfill to complete flexion and extension movements was deduced. The results were the theoretical foundation and guided for the later design of this kind of mechanical finger.
Key words: mechanical finger; flexion and extension movement; geometric parameters relationship
0 引 言
1 手指结构
连杆机械手指的结构如图1。
该机构通过单一动力作用于活塞连杆5,使其完成小幅度往复运动,进而实现手指关节的伸直和蜷曲。并且通过合理设计连杆长度和关节尺寸,确定手指运动幅度大小和活塞行程。整个机构通过一个曲柄滑块机构和两个四连杆机构实现运动,结构简单,制造成本低,可实现参数化设计和大批量生产。
2 工作原理
图1所示机械手指完成伸直到蜷曲动作的过程是:关节3绕点C旋转90°,关节2绕F点旋转90°,关节1绕点I旋转90°。其中连杆4、关节3和活塞连杆5构成曲柄滑块机构(如图2),CDEF以及FGHI构成两个四连杆机构(如图3)。若要顺利完成手指屈伸运动,要求曲柄滑块机构和四连杆机构在运动90°过程中均不出现“死点”[3],该条件就需要连杆长度和关节打孔位置满足一定关系。下面用解析法求出满足上述条件时活塞行程、连杆长度和关节打孔位置关系。
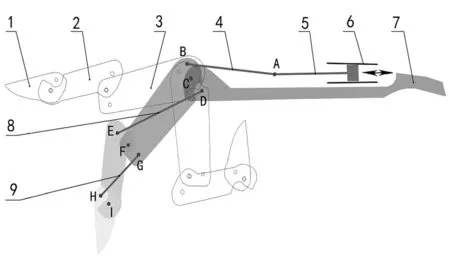
图1 机械手指结构示意图 1.关节 2.关节 3.关节 4.连杆 5.活塞连杆 6.汽缸 7.手掌(固定支座) 8.连杆 9.连杆
2.1 曲柄滑块机构
关节3绕点C由初始位置(A、C、F共线)旋转至垂直位置(AC┴CF)时,可简化为4滑块A杆BC和杆AB组成的曲柄滑块机构(如图2)。其中△ABC为曲柄滑块初始位置,对应边长为a,b,c;△A′B′C为最终位置,对应边长为a,b′,c。A运动到A′过程中,杆CB绕点C旋转90°至CB′。为使计算简便,可设初始∠ACB=45°,转动90°后∠ACB′=135°。
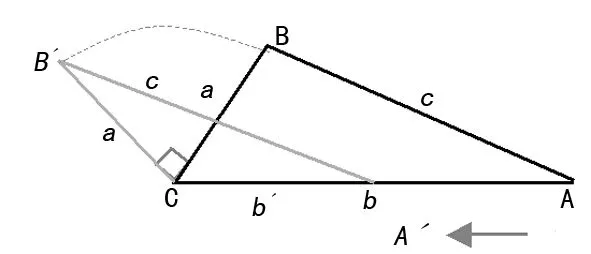
图2 曲柄滑块机构原理
对于初始△ABC,根据余玄定理,有:
a2+b2-c2=2abcos 45°
MRI,即磁共振成像,在临床上有着良好的应用,尤其是在对颅脑、脊髓、心脏大血管等进行成像检查,其效果最佳。因此,采用MRI对儿童进行垂体结构和病变的观察,其效果良好,而且该检查方式是检查异位垂体后叶的唯一影像学方式。而3.0T MRI,其组织对比度、化学位移分辨率、磁敏感性对比都明显较高,不仅可以对显示细微解剖结构进行优化,还可以有效提高影像的分辨率。不仅如此,在相同信噪比的基础上,3.0T MRI还可以提高采集的速度[4]。
(1)
整理,得:
同理,对于△A′B′C有:
a2+b′2-c2=2ab′cos 135°
(2)
整理,得:
式(1)、(2) 整理,得:
(3)

2.2 四连杆机构
关节3绕点C旋转90°,同时,关节2需相对绕点F旋转90°,可以简化为CDEF组成的四连杆机构(如图3),其中CD为不动杆,CF为主动杆,要求杆CF转动90°时,杆FE绕点F转动90°。
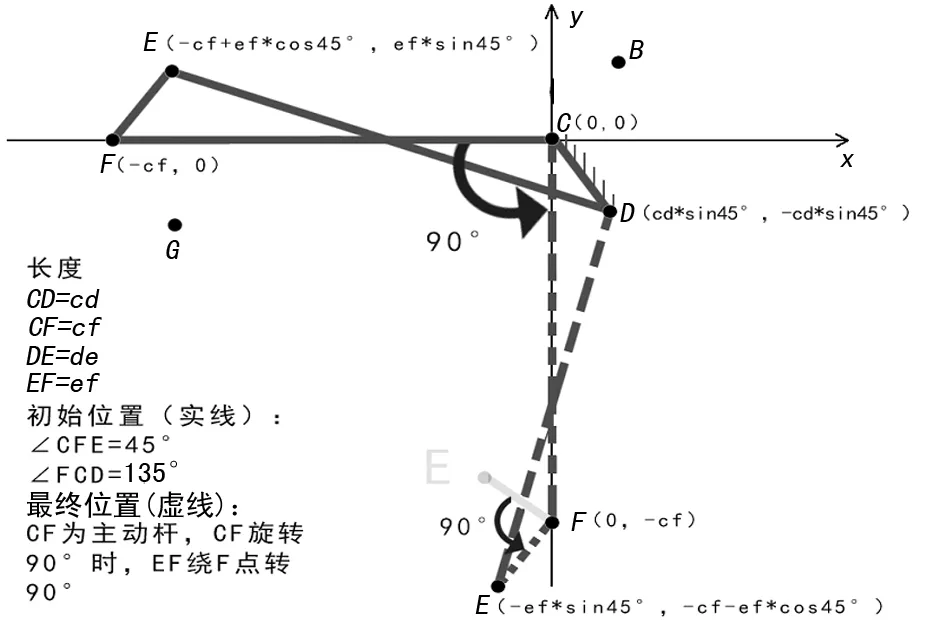
图3 四连杆机构
以点C为原点建立坐标系,初始位置杆CF水平(A、C、F共线),为使计算简便,设点D与点B关于x轴对称,杆CD与x轴夹角为45°,杆EF与x轴夹角45°。根据各连杆长度确定各点的坐标(如图3),初始位置杆DE的长度为:
de2= (-cf+efcos 45°-cdsin 45°)2+
(efsin 45°+cdsin45°)2
最终位置时,杆DE长度为:
de2= (-efsin 45°-cdsin 45°)2+
(-cf-efcos 45°+cdsin45°)2
式(4)、(5),整理得:
cd=ef
由式(6)可以确定杆CD、杆EF的关系,保证关节运动得以实现,该条件是表明机架长度和连杆长度相同。而后可根据真实手指的尺寸首先确定杆EF长度,即孔E的位置,同时也确定了孔D的位置,而后根据工程需要确定杆CF长度,即孔F的位置,最后连杆8(图1)长度可求得。满足初始位置∠FCD=135°,∠CEF=45°,cd=ef,则机构无“死点”。
同理,FGHI可简化为与上述相同的四连杆机构,经过计算可求得fh=hi,根据工程需要确定孔I、孔H、孔G的位置,最终求得连杆9的长度。
至此,连杆机械手指关节各孔位置和连杆长度确定,在满足式(3)和式(6)前提下,调整关节长度和孔的位置,可设计不同尺寸的机械手指,并且能克服运动中“死点”问题。通过销钉进行装配后,通过控制活塞连杆5的往复运动,可以实现手指的伸屈动作,并且由于杆BC(图2)相对各关节长度较小,活塞行程也较小。
3 结 语
本机械手为刚性连杆机械手,其特点为:结构简单,控制方便,制造成本低,能够模拟真实手指的伸屈。但是,该类机械手指只能完成单一的伸屈动作,在处置工序复杂繁琐的操作时缺少灵活性。若想模拟人类手指的灵活动作,还需采用柔性机械手的传感、数控等技术。
[1] 周安明. 基于液压驱动柔性机械手的仿真与分析[D].长春:吉林大学,2009.
[2] 孙 桓. 机械原理[M].第八版.北京:高等教育出版社,2013.
[3] 程引正.平面四杆机构死点问题探究及应用[J].北京:机械研究与应用,2010(3):55-56.
Basic Relationship of Flexion and Extension Movements for A Kind of Connecting Rod Mechanical Finger
ZHU Ye, GANG Qin-guo
(InstituteOfArchitecturalEngineering,HebeiUniversity,BaodingHebei071000,China)
2014-06-20
国家自然科学基金(编号:61203160)
朱 晔(1987-),男,河北保定人,硕士,研究方向:机械设计制造及其自动化。
TP241
A
1007-4414(2014)04-0035-02
猜你喜欢
初中生学习指导·中考版(2021年7期)2021-08-21
机械工程师(2021年4期)2021-04-19
设备管理与维修(2019年22期)2019-12-19
制造技术与机床(2018年11期)2018-11-23
机械研究与应用(2018年5期)2018-11-05
制造技术与机床(2017年4期)2017-06-22
试题与研究·中考数学(2016年3期)2016-12-27
通信电源技术(2016年1期)2016-04-16
河南科技(2014年11期)2014-02-27
河南科技(2014年6期)2014-02-27
