UUV集群探雷效能评估方法
2014-08-02 03:56袁思鸣
舰船科学技术 2014年12期
陈 强, 袁思鸣
(海军装备研究院,北京 100161)
UUV集群探雷效能评估方法
陈 强, 袁思鸣
(海军装备研究院,北京 100161)
针对UUV探雷作业任务,建立UUV集群探雷作业效能评估模型。针对UUV集群搜索和探测水雷2种机动方式,进行集群探雷作业效能评估分析,给出UUV集群搜索效率和发现目标概率。
UUV;集群探雷;效能评估
0 引 言
本文主要研究典型作业条件下,UUV集群探雷作业效能评估问题。在以典型作业为背景进行效能评估时,效能评估方法和评估结果实际上与UUV装备性能、作战环境、作业方法密切相关,应该考虑这3个方面的要素。实际进行评估时,为简化工作量,减少评估的复杂性,常常会假定某个条件,或简化模型,以突出某个阶段重点关注的问题,淡化其他影响因素。例如,在主要考虑UUV机动方式或主要战术技术性能影响因素时,可能会取典型海洋环境条件下探测传感器的性能指标,从而弱化不同海洋环境因素对探测传感器性能和作业效能的影响。UUV探测水雷一般有2种方式:一是在某个区域以固定航速沿直线方向搜索和探测水雷;二是在某个区域按“梳”字形机动搜索和探测水雷。
典型想定为:UUV由Ngc个探测传感节点和Ntx个通信节点构成1个群使用。UUV探测传感节点之间的距离为d/m,探测水雷距离为Rgc/m。探雷作业区域大小,横向宽度为Bhx/n mile,纵向长度为Lzx/n mile,作业区域面积Ssq/n mile2,考察UUV集群探雷作业效能。
1 在某个区域以固定航速沿直线方向搜索和探测探雷
UUV集群以航速Vgc/kn沿着作业区纵向搜索。UUV群可采用横向线式队形搜索,也可采用三角形队形搜索。
对于采用三角形分布的集群,领航者在前面,其他UUV在其后面跟随。领航者与各UUV之间的间距为d,其在横向方向投影为dhx,在纵向方向投影为dzx,UUV集群队形长度Lhx与作业区域宽度Bhx相同,dhx由下式确定:
Lhx=(dhx(Ngc-1)+2Rgc)/1852,
(1)

图1 搜索区域为一个纵向长度远大于横向长度的矩形Fig.1 Rectangle search area (lognitudinal length more longer then transverse length)

图2 UUV横向间距的确定Fig.2 Establish transverse distance between a UUV and another UUV
(2)
当UUV群采用横向线式分布时,只需将UUV间距d替换原来的横向间距dhx,即可利用上述公式计算横向线式分布情况下的集群搜索效率和发现目标概率。当给定UUV探测距离Rgc时,可根据搜索区域横向总宽度,确定UUV之间的横向间距。若2个UUV之间的横向间距大于UUV探测距离2倍时;二者之间会出现空隙区;若小于UUV探测距离2倍时,二者之间会出现重叠区。设:
Zpj=dhx-2Rgc。
(3)
若Zpj<0,则出现重叠区;若Zpj>0,则出现空隙区;若Zpj=0,则既没有空隙区,也没有重叠区,此时,UUV队形为最优配置。取各UUV探测覆盖范围在横向投影宽度之和与搜索区域横向宽度之比作为发现目标概率,可计算得到UUV集群搜索发现目标概率。
Pfx=各UUV探测覆盖范围在横向投影宽度之和
/搜索区域横向宽度。
(4)
UUV集群搜索效率分以下2种情况进行计算。
有空隙区时:
Cjq=(2RgcNgc)Vgc/1852;
(5)
有重叠区时:
Cjq=(2RgcNgc-abs(Zpj)
(Ngc-1))Vgc/1852。
(6)
1)算例1
假设Ngc=3,Ntx=2,横向宽度Bhx=914 m,纵向长度Lzx=20 n mile,作业区域面积约9.8 n mile2。UUV航速Vgc=3 kn,作业时间需6~7 h。将基本数据带入式(1)~式(6),可计算得到UUV之间的横向间距、UUV之间的横向空隙区或重叠区、发现目标概率和集群搜索效率。
计算结果表明:若UUV探测距离小于140 m,则2个UUV之间有空隙区域,目标会有遗漏;若UUV探测距离大于140 m,则2个UUV之间有重叠区域。2个UUV有空隙区时,发现目标概率较低,空隙区减小,发现目标概率增加;有重叠区时,发现目标概率达到1,重叠区增加对目标发现概率没有影响。UUV探测距离增加,集群搜索效率提高;出现重叠区后,重叠区增加对集群搜索效率没有影响。

表1 UUV集群搜索效率和发现目标概率计算
2)算例2
假设Ngc=3,Ntx=2,搜索区纵向长度Lzx=20 n mile。UUV航速Vgc=3 kn,作业时间需6~7 h。航向器探测距离为Rgc,UUV之间的横向间距为dhx,则搜索区横向宽度Bhx可根据UUV探测距离和UUV之间的横向间距来确定。将基本数据代入式(1)~式(6),可计算得到搜索区横向宽度、UUV之间的横向空隙区或重叠区、发现目标概率和目标搜索效率。
表2 UUV探测距离为100 m时的集群搜索效率和发现目标概率
表3 UUV探测距离为140 m时的集群搜索效率和发现目标概率

表4 UUV探测距离为180 m时的集群搜索效率和发现目标概率
计算分析表明:UUV探测距离增加,在保持相同发现目标概率条件下,搜索区域横向宽度可增大,集群搜索效率增加;有重叠区时,重叠区越大,集群搜索效率越低,发现目标概率不变保持为1;有空隙区时,空隙区越大,发现目标概率越低,而集群搜索效率不变。
3)算例3
UUV主要性能如表5所示。假设Ngc=3~5,Ntx=2,作业区域横向宽度Bhx=914 m,纵向长度Lzx=20 n mile,作业区域面积约9.8 n mile2。UUV航速Vgc=4 kn,作业时间需5 h。将基本数据代入式(1)~式(6),可计算得到UUV之间的横向间距、UUV之间的横向空隙区或重叠区、发现目标概率和目标搜索效率。
表5 典型UUV主要性能参数
Tab.5 Typical UUV main performance parameter

项 目UUV-AUUV-B搜索速度/kn44续航力/km100180搜索时间/h1324侧扫声呐工作频率/kHz300400侧扫声呐覆盖角/(°)150128侧扫声呐侧扫范围/m100200

表6 典型UUV集群搜索效率和发现目标概率
从表中计算结果可知,UUV-A由于探测目标距离近,配置3个UUV-A不能完全覆盖搜索区域横向宽度,存在较大空隙区,发现目标概率为0.656,集群搜索效率为1.296;配置4个UUV-A仍不能完全覆盖搜索区域横向宽度,存在一定空隙区,发现目标概率提高到0.875,集群搜索效率提高到1.728;配置5个UUV-A能完全覆盖搜索区域横向宽度,发现目标概率达到1.00,集群搜索效率达到1.974,与配置3个UUV-B的集群搜索效率和发现目标概率相同。因此,在上述假设条件下,所需UUV-A与UUV-B数量之比为5∶3, 即3艘UUV-B相当于5艘UUV-A的作业效果,说明探测目标距离对集群搜索效率有很大影响。
在发现目标概率为1.00条件下,集群搜索效率为1.974,假设目标落入探测声呐作用区域的概率为P接触,则UUV在单位时间内发现静止目标的期望数为:
γ期望= (C集群/Ssq)×P接触。
(7)
取接触概率P接触为1.0,将有关数据代入式(7),得到单位时间内发现静止目标的期望数为:
γ期望=(1.974/9.8)×1.00=0.2(1/h)。
搜索整个区间所需时间为5 h,5 h发现目标期望数为1.0,即采用上述搜索方法和搜索队形参数,搜索5 h必定能够发现目标。
2 在某个区域按“梳”字形机动搜索和探测水雷
假定UUV采用“梳”字形机动搜索一个面积为Ssq(n mile2)的区域。作业区域横向宽度Bhx=2 n mile,纵向长度Lzx=10 n mile,作业区域面积约20 n mile2。探测UUV数量Ngc=3~5,通信UUV数量Ntx=2,航速Vgc=4 kn,UUV探测距离Rgc为100 m或200 m。UUV采用横线式队形搜索目标,UUV之间的横向间距d=2Rgc,发现目标概率Pfx=1,将基本数据代入式(1)~式(6),可计算得到UUV队形长度Lhx和集群搜索效率。
图3 “梳”字形机动搜索和探测作业示意图Fig.3 Mobile search and detection operation in comb form
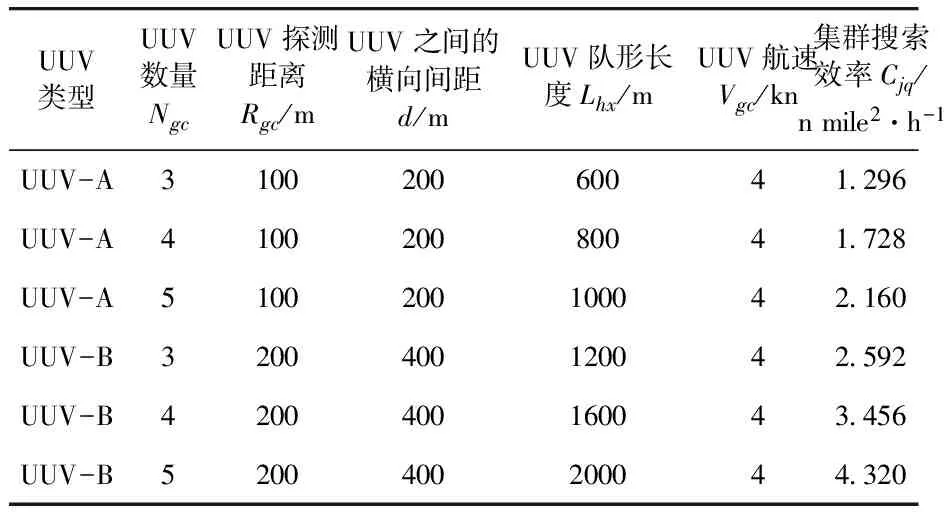
UUV类型UUV数量NgcUUV探测距离Rgc/mUUV之间的横向间距d/mUUV队形长度Lhx/mUUV航速Vgc/kn集群搜索效率Cjq/nmile2·h-1UUV-A310020060041296UUV-A410020080041728UUV-A5100200100042160UUV-B3200400120042592UUV-B4200400160043456UUV-B5200400200044320
UUV编队沿着横向走“梳”字形,根据UUV编队长度Lhx和搜索区纵向长度Lzx,可确定编队完成整个区域搜索沿着横向需要搜索次数,即:
Nbs=INT(1852×Lzx/Lhx)。
(8)
式中:INT为取整数的函数。
根据几何概率公式,在搜索区域内编队集群搜索时发现目标的概率为编队搜索目标面积与搜索区域面积之比,并考虑UUV编队纵向搜索发现目标概率,即:
Pjqfx=(Sgc/Ssq)×Pfx。
(9)
式中:
Sgc=Lhx×Bhx×Nbs/1852,
(10)
Ssq=Lzx×Bhx,
(11)
Pfx=1。
将基本参数代入式(8)~式(11),可得编队集群搜索该探雷作业区的发现目标概率。

表8 编队集群搜索探雷作业区的发现目标概率
UUV作业效能可用UUV在单位时间内发现静止目标的期望数γ期望和期望时间T期望表征。对于编队集群搜索,在单位时间内发现静止目标的期望数为:
γ期望=C集群/Ssq,
(12)
若搜索整个区域所需时间为Tssh,则在Tssh发现目标期望数为:
γ=Tss×γ期望。
(13)
编队搜索整个探雷作业区时间为编队航行距离除以航行速度。显然,编队航行距离等于作业区横向宽度乘以编队搜索往返次数。采用上述搜索方法和搜索队形参数,搜索Tssh发现目标期望数与编队发现目标概率一致,在95%以上。

表9 “梳”字型编队搜索探雷作业区发现目标期望数
分析表7~表9的计算结果可知:UUV-B的集群搜索效率和UUV-B队形长度为UUV-A的2倍,编队搜索往返次数和搜索目标时间减少一半,UUV-B采用3 kn或5 kn航速发现目标概率最大,4 kn航速时续航时间约为27 h,满足上述给定区域搜索作业时间的需求;UUV-A采用4 kn航速发现目标概率最大,由于4 kn航速时续航时间为13 h,难以满足上述给定区域搜索作业时间的需求。
3 结 语
本文针对UUV的探雷任务,提出了典型的探雷作业方法。按照设定的典型探雷作业想定,建立了集群探雷作业效能评估模型,给出了不同装备性能参数、编队队形要素对作业效能的影响规律。针对典型UUV装备性能参数,根据设定作业海区开展了不同搜索样式下的效能评估分析。研究和分析结果可用于UUV装备型号研制立项综合论证,也可为部队使用UUV进行探雷作业训练提供参考。
[1] В.А阿勃楚克,В.Г苏兹达尔.搜索目标法[M].中国系统工程学会军事系统工程委员会,1982.
В.А阿勃楚克,В.Г苏兹达尔.Searching target method[M].Systems Engineering Society of China Military Syst-ems Engineering Committee,1982.
[2] 武器装备论证通用规范:战术技术指标论证[S].GJBz 20221.6-94.
General specification for demonstration of weapon and equipment Tactical and technical goal demonstration.GJBz 20221.6-94.
[3] WILLCOX S,et al.Multi-vehicle cooperative navigation and autonomy with the bluefin cadre system[M].Cambridge, MA:Bluefin Robotics Corporation.
Research on efficiency evaluation method of UUV group detection mine
CHEN Qiang,YUAN Si-ming
(Navy Equipment Academe,Beijing 100161,China)
Paper established efficiency evaluation model of UUV group detection mine for UUV detection mine task. This progressed efficiency evaluation analysis of UUV group detection mine and presented search efficiency and find target probability in UUV group manner for two kind of mobile manner of UUV group search and detection mine.
UUV;group detection mine;efficiency evaluation
2014-01-17;
2014-03-24
陈强(1961-),男,研究员,从事舰艇和水下无人航行器论证研究。
TP242
A
1672-7649(2014)12-0178-05
10.3404/j.issn.1672-7649.2014.12.001
猜你喜欢
满族文学(2019年5期)2019-10-08
北京航空航天大学学报(2017年3期)2017-11-23
领导决策信息(2017年14期)2017-06-21
北京航空航天大学学报(2017年10期)2017-04-20
北京航空航天大学学报(2017年10期)2017-04-20
人生十六七(2015年5期)2015-02-28
海军航空大学学报(2015年4期)2015-02-27
筑路机械与施工机械化(2014年8期)2014-03-01
销售与市场·管理版(2009年21期)2009-09-03