基于STC89C58芯片的小型GPS船舶航迹仪的设计
2014-08-02 03:56潘谈
舰船科学技术 2014年12期
潘 谈
(吉林电子信息职业技术学院,吉林 吉林 132021)
基于STC89C58芯片的小型GPS船舶航迹仪的设计
潘 谈
(吉林电子信息职业技术学院,吉林 吉林 132021)
为克服航海日志和纸海图进行船舶航迹记录的缺点,本文基于STC89C58芯片设计一种经济实用的小型GPS船舶航迹仪,能够完整、准确的记录船舶的大量航行数据,且具有船舶航行必备的导航功能。该航迹仪主要由STC89C58单片机、GPS模块、存储器、TFT彩屏显示模块、串口通信接口、按键模块和电源模块组成,以Gstar-GS-15C作为GPS数据信息接收器。硬件系统的总功耗仅为85 mA,所测船舶经度和纬度数据标准偏差分别小于0.03 s和0.136 s。经调试,本文所设计的航迹仪在功能和测量精度上均满足使用要求。
航迹仪;GPS;单片机;船舶
0 引 言
随着海洋资源对人类生产和生活重要性的不断提高,使得用于海洋资源运输的船舶快速向大型化和高速化发展且海上船舶的数量也不断增加。海洋运输已成为我国外贸领域中最重要的运输方式之一,约占全部运输量的80%以上[1-2]。因此,进行船舶航迹记录,确保船舶航行安全,降低航行事故的发生,已成为船舶科学领域研究的热点和难点[3-5]。人工《航海日志》和纸海图是目前航迹记录的2种基本形式:《航海日志》是一种简单直接的航迹记录方式,但是对操作者要求较高,记录内容主观性较强,在特殊情况下,记录数据的真实性和完整性有待验证,一旦出现记录数据不准确或不完整将会给船舶的安全航行埋下隐患。纸海图是一种具有智能化的航迹记录仪器,记录数据由特种绘笔绘制而成,记录数据的内容主要包括:航行轨迹、方向、船位和锚位等。然而,这种方式使用的前提是具备大量的海图信息库,成本较高,一般的小船很少有条件使用这种设备。GPS具有海洋、陆地和空中实时定位、测速和导航的功能,对船舶航海技术的快速发展起着巨大的推动作用[6-7]。现有的海用型GPS导航仪仅能显示船舶的实时位置、速度和方向信息。少见专门用于航行数据记录的小型GPS航迹记录仪。本文将基于STC89C58芯片设计一种经济实用的小型GPS船舶航迹仪,能够完整、准确的记录船舶的大量航行数据,且具有船舶航行必备的导航功能。
1 航迹仪硬件设计
小型GPS船舶航迹仪硬件主要由STC89C58单片机、GPS模块、存储器、TFT彩屏显示模块、串口通信接口、按键模块和电源模块组成。航迹仪硬件系统结构框图如图1所示。
硬件系统以STC89C58单片机为微处理器,当单片机接受到GPS模块传输过来的数据后,进行数据分析以提取所需信息,最后将处理后的数据进行数据存储和显示。以Gstar-GS-15C作为GPS数据信息接收器,该芯片将从GPS卫星接收到的信息通过串行接口实时传送给微处理器。采用SD卡作为数据存储器,容量大,能够存储大量船舶的地址位置信息、航速和航向等,适用于海上船舶航行时间长数据量大的需求。航迹数据的显示采用TFT液晶显示器,实时显示船舶的位置信息并设置开关机和重启复位等按键信息。由于微处理器及整个硬件系统耗电量较小,因此,本系统只需4节充电电池或电脑USB供电即可。
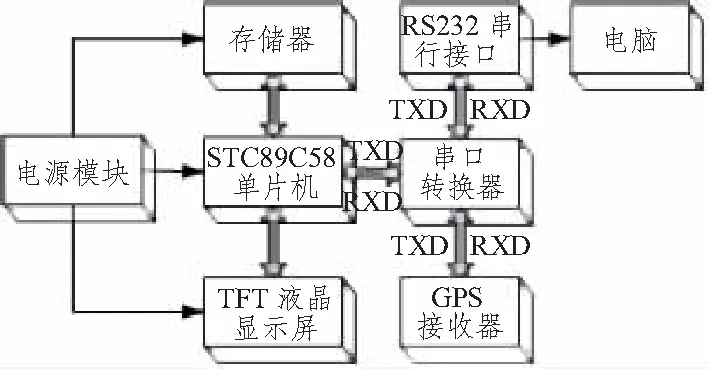
图1 航迹仪硬件系统结构框图Fig.1 The structure diagram of course tracking hardware system
Gstar-GS-15C将集GPS接收机的主要功能于一体,具有接收效果好、体积小、性价比高等优点,是一种32通道的卫星定位接收芯片,抗干扰能力强,广泛适用于海洋上各种复杂环境。其主要参数设置如表1所示。通过实验实测上述硬件系统的总功耗约为85 mA,因此,为满足船舶在野外一到两天的使用要求,采用容量为2 700 mAH的中档镍镉电池即可,价格低廉。

表1 Gstar-GS-15C参数设置表
本文所设计航迹记录仪力求体积小巧还能够为船员提供足够丰富的航迹信息。TFT-LCD是目前较为成熟的一种LCD显示器,具有体积小、功耗低和显示内容丰富等特点且价格便宜。
2 航迹仪软件及界面设计
为便于软件调试和软件的移植和修改,按照模块化软件设计要求,本文设计的航迹仪软件主要分为主程序、GPS数据处理模块、显示程序模块、文件系统及数据读写模块5个软件模块。为实现数据采集、显示和存储功能分离,软件总体设计流程图如图2所示。其中,系统初始化是指GPS模块、液晶显示模块、数据读写模块等进行初始化,经单片机处理后如接收到的设计有效,则将对有效数据进行处理,处理过程主要包括数据的解析、显示和储存等操作。
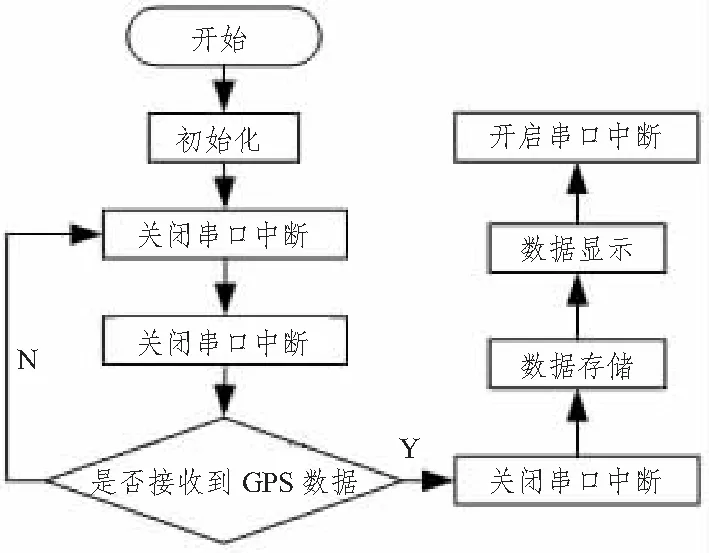
图2 航迹仪软件流程图Fig.2 The flow chart of course tracking software
GPS接收机与用户之间的数据通信格式大多采用NMEA-0183(The National Marine Electronics Association,即美国海洋电子协会)数据标准。其通信格式定义如下:波特率4 800 bit/s,数据位8位,停止位1位,无奇偶校验位。图3所示为液晶显示芯片时序图,其中,DC是数据与命令之间的切换,低电平表示命令,高电平表示数据。以写入命令为例,DC拉低—CS位拉低—片选开—单片机PORT写入—WR输出低电平—TFT液晶写入命令并恢复高电平。吸入数据与写入命令程序类似。图4所示为航迹记录仪的液晶显示界面,主要分为开机初始化界面和定位信息界面。

图3 TFT液晶时序图Fig.3 TFT LCD write command sequence diagram

图4 航迹仪界面设计Fig.4 The interface design of course tracking
3 系统调试和分析
为了测试本文所设计的航迹记录仪的可靠性,在对硬件和软件进行分别调试后进行软硬件的联机调试。制作的航迹记录仪如图5所示。依次进行单片机最小系统调试、GPS模块Gstar-GS-15C调试、系统软件调试和整体调试。GPS模块Gstar-GS-15C调试的主要内容摆阔模块是否正常运行、波特率大小和数据的输出格式,调试软件采用J-Nav-Analyzer软件。测试结果表明:TFT液晶显示效果达到预期要求,能够准确显示经纬度和时间等信息,文件操作满足一般应用要求且存储的读写功能完整。
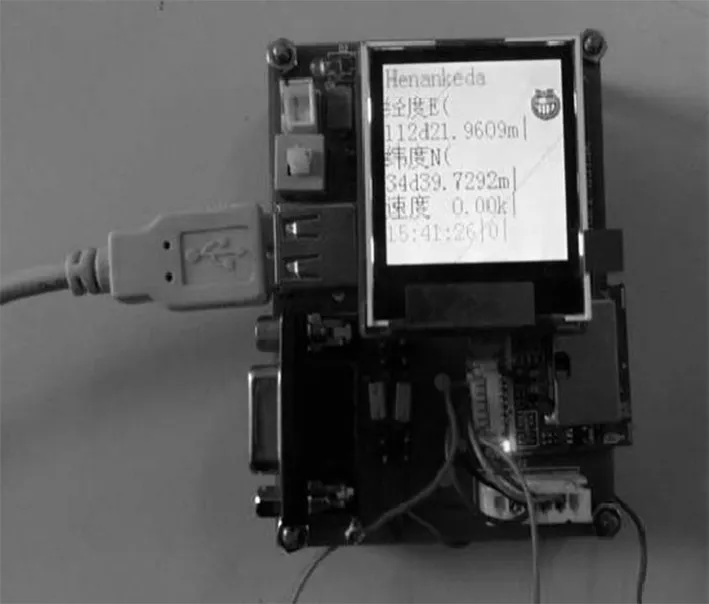
图5 航迹仪硬件实物图Fig.5 The hardware physical figure of course tracking
GPS模块的输出数据的最低位为0.0001 min。因此,在国内地区A精度的最小里程测量精度为0.15 m,经度的最小里程精度为0.19 m。理论上,GPS模块的测量精度是很高的,可达到厘米数量级。本文所设计的航迹记录仪数据采集频率是1 Hz,共采集10组数据,数据的记录格式为“xx°xx.xxxx’”。所测10组经度和纬度数据如表2所示。
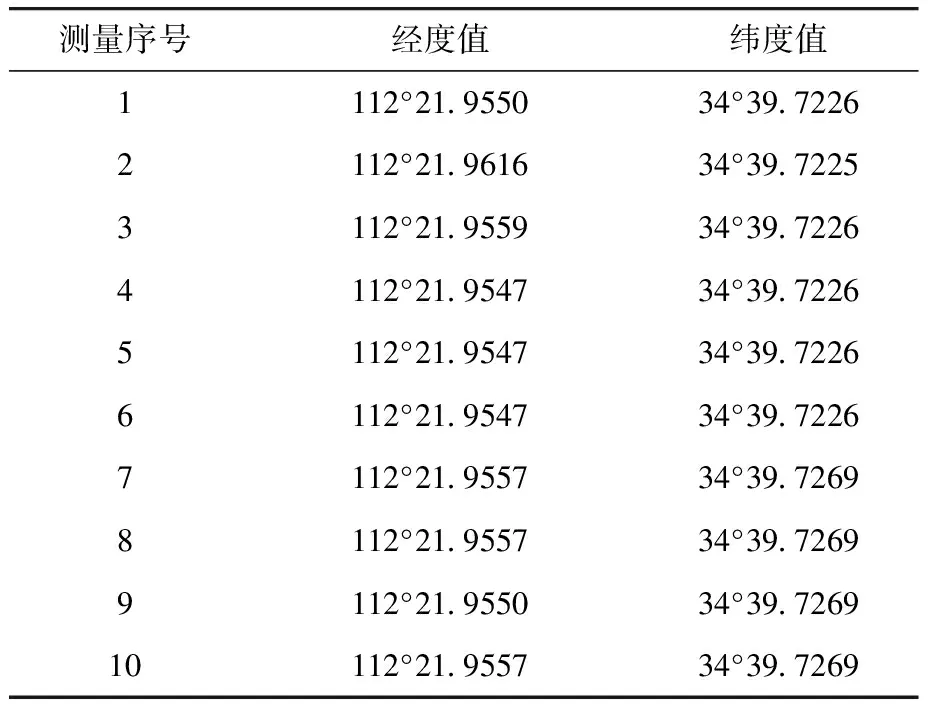
表2 航迹仪实测经纬度数据
设测得的10个经度数据分别记录为x1,x2,…,x10,则经度的算术平均值可由式(1)进行计算。
(1)

(2)
所得结果为σx=0.000 53′=0.03″,σy=0.002 26′=0.136″。此外,本文还对单次测量的误差限进行考察,即极端误差。单次测量或测量的数据平均值不超过该极端误差概率P且设误差限为δlim。测量的极端误差可由式(3)进行计算,其中t为置信系数,本文取t=3,则对应的概率p=99.73%。
δlim=±tσ。
(3)
所得结果为δlim=±3×0.03×25.6=±2.3 m,δlim=±3×0.136×30.9=±12.6 m。
本文仅用一个GPS接收机对船舶进行定位,属于单点定位,因此定位精度受大气延误和卫星星历的影响较大,易造成定位的不稳定,因此存在上述定位误差是不可避免的且误差范围在船舶航行可接受的误差范围之内。
4 结 语
本文基于STC89C58芯片设计一种经济实用的小型GPS船舶航迹仪,能够完整、准确的记录船舶的大量航行数据,且具有船舶航行必备的导航功能。该航迹仪主要由STC89C58单片机、GPS模块、存储器、TFT彩屏显示模块、串口通信接口、按键模块和电源模块组成,以Gstar-GS-15C作为GPS数据信息接收器。硬件系统的总功耗仅为85 mA,所测船舶经度和纬度数据标准偏差分别小于0.03 s和0.136 s。经调试,本文所设计的航迹仪在功能和测量精度上均满足使用要求。
[1] 方泉根.船舶船舶规范化安全评估(FSA)与船舶航行安全[J].南通航运职业技术学院学报,2007,6(1):59-64.
FANG Quan-gen.Formal safety assessment and safety navigation of ships[J].Jounrnal of Nantong Vocaional & Technical Shipping College,2007,6(1):59-64.
[2] IBRAHIM A,VURAL A,VOLKAN A,et al.Optimal ship navigation with safety distance and realistic turn constraints[J].European Journal of Operational Research,2013,229:707-717.
[3] 罗浩,邹伟,郭勇.一种用于确定融合航迹与真实航迹对应关系的方法[J].舰船科学技术,2013,35(4):54-57.
LUO Hao,ZOU Wei,GUO Yong.A method for determining the corresponding relationship of fusion track and truth track[J].Ship Science and Technology,2013,35(4):54-57.
[4] 周卫东,王克文.一种基于ARM及FPGA的新型智能化航迹仪的设计[J].嵌入式技术,2008(2):34-38.
ZHOU Wei-dong,WANG Ke-wen.Design of a new intelligent course plotter based on ARM and FPGA[J].Embeded Technology,2008(2):34-38.
[5] 周卫东,王克文.针对航迹仪系统振动噪音的分析与改造[J].船舶工程,2008,30(3):46-49.
ZHOU Wei-dong.WANG Ke-wen.Analysis and transformation against vibration and noise of the track plotter system[J].Ship Engineering,2008,30(3):46-49.
[6] PETER H D.Global positioning system (GPS) time dissemination for real-time applications[J].Real-Time Systems,1997,12(1):9-40.
[7] 贾晓博,范勇.惯导辅助的GPS船舶测姿系统关键技术研究[J].舰船科学技术,2010,32(3):74-77.
JIA Xiao-bo,FAN Yong.A key technology research on inertia-a ided GPS-based ship attitude determination system[J].Ship Science and Technology,2010,32(3):74-77.
Design of a portable GPS track plotter based on chip STC89C58
PAN Tan
(Jilin Technology College of Electronic Information,Jilin 132021,China)
To overcome the shortcomings of logbook and paper chart in recording the voyage data of ships, this paper designed a kind of economical and practical portable GPS voyage data recorder based on chip STC89C58. The designed recorder can record the abundant voyage data of ships integrally and accurately and bas the necessary navigating function for ships. The designed recorder is composed of chip STC89C58, a GPS module, a memorizer, a TFT color display, serial communication interface, keypress module and power module. The Gstar-GS-15C was chosen as the receptor of GPS data. The total power consumption of the hardware system was as small as 85mA, the standard deviation of the measured data of longitude and latitude is smaller than 0.03 second and 0.136 second separately. After debugging, the track plotter is satisfied with the application requirements in function and measuring accuracy.
track plotter;GPS;microcontroller;ship
2014-03-14;
2014-07-02
吉林省教育厅“十一五”科学技术研究资助项目
潘谈(1980-),女,硕士,讲师 ,研究方向为计算机应用技术、计算机软件技术及仿真技术。
U665.26
A
1672-7649(2014)12-0124-04
10.3404/j.issn.1672-7649.2014.12.028
猜你喜欢
疯狂英语·新读写(2021年6期)2021-08-05
建材发展导向(2021年23期)2021-03-08
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
当代工人(2020年8期)2020-05-25
青年歌声(2019年12期)2019-12-17
电子制作(2018年12期)2018-08-01
创新作文(1-2年级)(2017年7期)2017-12-26
北京航空航天大学学报(2017年7期)2017-11-24
电子制作(2017年19期)2017-02-02