
木材加工车间清洁机器人的动态避障路径规划1)
2014-08-02 03:54周宏威孙丽萍戴亮霞郭婷婷
东北林业大学学报 2014年6期
周宏威 孙丽萍 戴亮霞 郭婷婷
(东北林业大学,哈尔滨,150040)
木材加工车间清洁机器人的动态避障路径规划1)
周宏威 孙丽萍 戴亮霞 郭婷婷
(东北林业大学,哈尔滨,150040)
针对木材加工车间的地面环境复杂多变的特点,利用CCD摄像头、辅助电路和控制器构成机器人的视觉系统,对多传感器智能清洁机器人进行动态避障路径规划。控制器之间选用并行主从式通讯方式,根据木材加工车间地面非结构化的特点,应用遗传规划对智能清洁机器人的路径规划进行研究,达到运动路径的全局最优化;在避障方面,利用视觉系统的信息反馈,对静态的障碍物进行避开,对复杂多变的动态障碍物进行分析,包括速度和运动趋势,进行智能避障和最优路径的规划。现场试验验证表明:设计能够使机器人实现预期的各项功能指标(如,自主避障及避障后最优路径的选择、无人干预时自主工作等);试验过程中,整个系统的工作稳定,能够很好地实现木材加工车间地面的智能清洁。
木材加工车间;清洁机器人;动态避障;路径规划
Because of the complicated environment of wood processing workshop, we used CCD camera, auxiliary circuit and controller and a robot vision system to establish dynamic obstacle avoiding path plan for multi-sensor intelligent cleaning robot. We uses parallel master-slave way to communicate with the system between the controllers. According to the unstructured characteristics of wood processing workshop ground, we used genetic programming algorism to plan the path, and do the global optimization of motion path. In obstacle avoidance, the static obstacles are avoided based on information feedback of vision system, and the dynamic obstacles are avoided based on analysis of speed and movement trend. Therefore, we realized the intelligent obstacle avoidance and optimal path planning. By field test results, the robot system can achieve all the expected function indexes (e.g., autonomous obstacle avoidance and optimal path selection, autonomous work without any human intervention, etc.). The working system is stable with good ground intelligent cleaning.
木材加工车间,由于其工作的性质,有很多的加工原材料以及由于各加工工序产生的剩余物,包括锯屑、砂光粉尘等,加之工作人员的走动,使得加工车间的环境变得复杂多变。但是,各加工工序产生的木屑、粉尘等,如果不及时的进行清理,会很快的堆积在机器的周围,影响操作人员的工作,严重时甚至会发生安全事故[1]。面对这样的情况,传统的应对方案是人工不定时清扫。但是,这样的操作方案,不仅加大了工作人员的劳动强度,而且在清扫过程中会使空气中的粉尘含量大大增加;这些粉尘甚至是有毒物质,随着人的呼吸进入呼吸道,严重威胁工作人员的生命健康[2-6]。本文尝试应用机器人在木材加工车间从事此项工作。
在应用机器人清扫地面时,运动路径的全局最优化,是提高控制器的计算速度与扩展性能领域研究的核心问题之一[7-9]。针对此问题,国内外学者提出许多解决方案。如:梁家海[10]将三维自然环境进行栅格化,对人工势场法进行改进,规划出一条从起始点到目标点的运行费用较低的路径;但其执行条件是在已知或大致已知的三维环境中。Selekwa[11]提出偏好模糊行为来解决机器人在拥挤环境下的路径规划,该方法能够为移动机器人规划出平滑的路径;但是,这并不能解决机器人在行进过程中的动态避障问题。
动态避障,是智能移动机器人路径规划中一个很重要的研究方向,它是智能机器人对复杂动态环境的自适应性要求,是智能机器人实现自我保护和与环境保持和谐的基础[12]。为了解决移动机器人在未知环境中的动态避障的问题,本文采用CCD(电荷耦合元件)传感器提取视频信号,经信号转换后,DSP控制器接收触感器模块传递的检测信号,并将信号加以处理。由于机器人不仅要绕开静止的障碍物,还要及时避开运动的障碍物,以保证清洁工作的正常进行及自身的安全;这对视频的实时性处理提出了很高的要求。用于视频处理的芯片,不仅需要具备很强的数据处理运算能力,更重要的是需要有灵活的系统整合能力。本文结合遗传算法理论,对检测到的传感器信息进行综合判断,对智能机器人的行动路径进行规划,提高全局寻优性能,更加灵活多变的适应复杂环境。
1 机器人设计及方法
1.1 系统功能设计
本设计方案的智能清洁机器人主要由6个模块组成:主控核心系统模块、传感器模块、电机执行驱动模块、语音提示模块、无线遥控模块、电源管理模块(见图1)。为了提高资源利用率和集成度,本设计将主控核心系统、传感器模块、电机执行驱动模块,安排在同一片电路板上[13];同时,利用光电隔离器件和电磁隔离器件,实现各模块间的电气隔离,以防止干扰,使整个系统能够稳定,实现精确的控制。
传感器模块,由灵敏度高、反应快的红外反射式传感器和方向性好的超声波传感器以及接触式传感器组成;信号检测到后,经传感器电路处理,之后送到控制器,使之做出相应的反应。

图1 清洁机器人的系统组成框图
主控核心系统模块由ARM和DSP组成。DSP主要对CCD摄像头传送过来的信号进行分析和处理,并将处理后的信息输入给ARM。ARM主要负责接收其他模块输入的信号,并综合这些信息做出相应的决策,发出指令,控制电机驱动执行模块;通过对驱动轮的控制,实现行进及自主避障功能;通过对吸尘系统的控制,完成地面的清洁任务。当然,为了方便对电源的管理,ARM控制器还会对电源管理模块进行控制,使智能清洁机器人能够实现自主充电。
1.2 传感器模块设计
1.2.1 CCD摄像头
此部分主要负责主动侦查机器人周围的环境情况,包括对周围静态障碍物的检查和多变的动态障碍物的判别[14]。机器人避障,特别是对动态障碍物的甄别,在实时性方面有很高的要求。使机器人能够实施有效的避障,并实现机器人工作路径的最优化,本文除了采用针对视频处理的DSP控制器以外,对于环境信息的采集,选用基于面阵CCD图像传感器的摄像头。
CCD具有灵敏度高、分辨率高、结构紧凑、像素位置准确、自动扫描等特点,所以在实际工程检测中,在运动物体的检测方面,有得天独厚的优势。同时,相比于传统的图像采集系统,面阵CCD,不仅受天气和环境的影响较小,而且它的响应速度非常快,更重要的是它能够实时保存包含运动目标信息的图像。因此,基于面阵CCD的视频系统,由于它的高可靠性、实时性而得到了广泛的应用。
摄像头置于机器人的头部,光学镜头将机器人前方的环境信息摄入,将环境成像在CCD的光敏面上;通过驱动电路发出的驱动脉冲的驱动下,CCD自动完成光电荷转换、存储、转移和读取,其结果是将二维的光学信号转换成一维的电信号,并将其传输给从控制器DSP。
1.2.2 传感器信息处理
传感器模块由多路传感器测量单元组成,它们可以不断地向控制器反映“路况信息”,控制器需要根据这些信息调整相应的行进策略。这要求控制器能够判断出障碍物的方位。针对这一问题,对于超声波传感器和红外测距传感器,本文在程序中为每一路检测单元都设定了标志位,不同的传感器对应的信息判断标志位的有效性不同;主程序通过不断检测每一个标志位值的有效性,判断障碍物的具体方位。
对于CCD摄像头,由于它是以视频的形式摄入模拟的环境信息,经过一系列的信号变换,最终将这些信号送给DSP控制器,因此,从控制器DSP一直都在处理视频信号。DSP处理图像信息后,将所得到的信息传递给主控制器ARM,由主控制器决策并发出控制指令。
1.3 最优路径规划设计
在本设计中,由于引入了CCD摄像头;所以,最优路径的选择,是基于CCD摄像头对机器人前方环境的反馈进行的。因此,在最优路径的选择上,需要解决两方面的问题:障碍物的识别与定位,路径的规划。
1.3.1 障碍物的识别和定位
CCD传感器提取视频信号后,输出的是PAL制式的模拟信号。本设计用Philips公司的SAA7113芯片,对该模拟信号进行AD转换后,通过IIC总线送给DSP控制器。DSP接收到该信号后,会进行一系列的运算处理,包括图像分析、图像识别和图像定位[15]。
由于加工车间障碍物与背景灰度级差别较大,因此,本文采用基于阈值的分割方法对视频图像进行分析和识别。即将图像灰度分成不同的等级,然后设定阈值,将阈值与像素的灰度进行比较,即可将障碍物和背景分割开来,此时也实现了障碍物的识别。又因为环境中光照比较均匀,图像灰度直方图呈明显的双峰,因此采用全局阈值对图像进行分割。
对障碍物的定位。对于静态的障碍物,本设计是通过对摄像机成像模型进行分析,建立物体的二维图像坐标与其三维世界坐标之间的关系,完成对摄像机参数的标定,从而从二维的图象中获得物体在三维世界坐标下的坐标位置。对于动态的障碍物,主要工作内容是检测出现和消失的物体。主要是CCD摄像头对环境信息不断地摄入,并进行保存,通过相邻的两个图像的比较,以前一个图像作为基准,当后一个图像与前一个出现不同时,则表示环境发生了变化。而且通过不断的比较,机器人系统可以得出运动障碍物的运动轨迹。根据对动态障碍物的运动趋势的分析,机器人做出相应的躲避反应,以实时有效的避开障碍物。
1.3.2 路径规划设计
本设计采用遗传算法(GP算法)进行避障设计。由于遗传算法与控制器程序联系紧密,因此常被用来解决程序的优化设计和代码生成等问题。所谓GP算法,是应用优胜劣汰的自然法则,对由随机产生的初始群体经过交叉变异和自然选择后形成的新群体,进行比较选择,进而自动生成性能良好的控制程序。
本设计中机器人的路径设计,是在GP算法的基础上,结合三维空间结构中机器人的运动特点,根据机器人视觉系统反馈的环境信息,利用程序获取机器人行动路径的过程。GP算法,具有计算速度快[16]、计算结果准确度高[17-18]等优点,因此,利用该方法求取全局最优解的过程中,很轻易的避免了限于局部最小值现象的发生[19]。
在本设计方案中,考虑到机器人的工作环境,其遇到的障碍物会有静止的,也会有运动的;因此,机器人的动态行为是基于视觉系统对障碍物的检测。控制系统对该检测结果的分析选择的结果,具体的设计方案如下。
①生成路径并编码。设目标点是D,机器人是R,两者距离为L,将视觉系统的搜索范围定为长为L,宽为L/2的矩形。将线段DR等分,并在每个等分点作DR的垂线,将每条垂线都N等分。这些点即为路径点,路径点的连线即为路径,即染色体。
②设计适应度函数。先对障碍物进行膨胀处理,视机器人可看成是一个点[20]。由于是找寻最优路径,因此,本设计中涉及到三个适应度函数的设计。
a.路径不经过障碍物的适应度函数(f1,f2)。此时,不仅路径点并不能落在障碍物上(f2),而且要求相邻的两个路径点Pi和Pi-1的连线与障碍物Os无交点(f1)(k是障碍物的数量)。
相邻路径点的连线不经过障碍物适应度函数为(f1):

路径点不在障碍物上的适应度函数为(f2):
b.避开动态障碍物的适应度函数(f3)。其中:mk为动态障碍物和其他机器人的数量和;θ1、θ2为动态障碍物和机器人的连线(RiOj)分别与机器人速度(vi)的角度和到动态障碍物速度(vj)的角度,它们都是矢量;d为避障半径[21]。


综上所述,可以得出综合适应度函数f=αf1+βf2+λf3+μf4,式中:α、β、λ、μ为可调整参数。
遗传算法的操作流程如图2所示。
2 结果与分析
本研究的重点是智能地面清洁机器人的动态避障路径规划。为了验证本设计方案的可行性和有效性,采用环境模拟的方法对该方案进行了验证。在验证试验中,用实验室内的大型实验设备模拟木材加工车间加工设备的存在,在地面铺洒木屑、锯末模拟加工车间的地面。通过静态障碍物环境下和动态复杂环境下机器人的自主清扫模式对本研究中的路径规划进行性能测试。

图2 遗传算法基本流程图
在静态环境试验中,记录机器人的行进路线。结果证明,机器人不仅在直线行进上表现出较好的直行能力,同时在自主避障及避障后路径的选择上有很好的理想性。更重要的是,在整个试验过程中,系统的各功能模块工作稳定。
在复杂动态环境试验中,在与静态试验相同的环境下,通过人员的走动和小型设备的移动对机器人的工作进行干扰,同时也记录下机器人的行进路线。试验过程中,机器人能够及时避开动态的障碍物。动静态避障路径如图3所示。
比较2次试验的行进路线,可以看到,2条路线有相同的地方,也有不同的地方:起初在没有动态干扰的地方,2条线路基本一致;但是,在有动态干扰的地方,2条路线开始出现差异,并且,之后的路线出现的差异越来越大。经过多次试验、多次比较发现,路径的不同都是在第一次出现动态干扰时发生。
3 讨论
本设计设计出了一种不仅能够自主完成清洁工作,而且能够智能避障,同时能够对动态的障碍物进行分析判断的小型木材加工车间地面智能清洁机器人系统,主要是围绕机器人的最优路径的选择进行设计。解决当前木材加工车间地面清洁不便和存在安全隐患的问题。
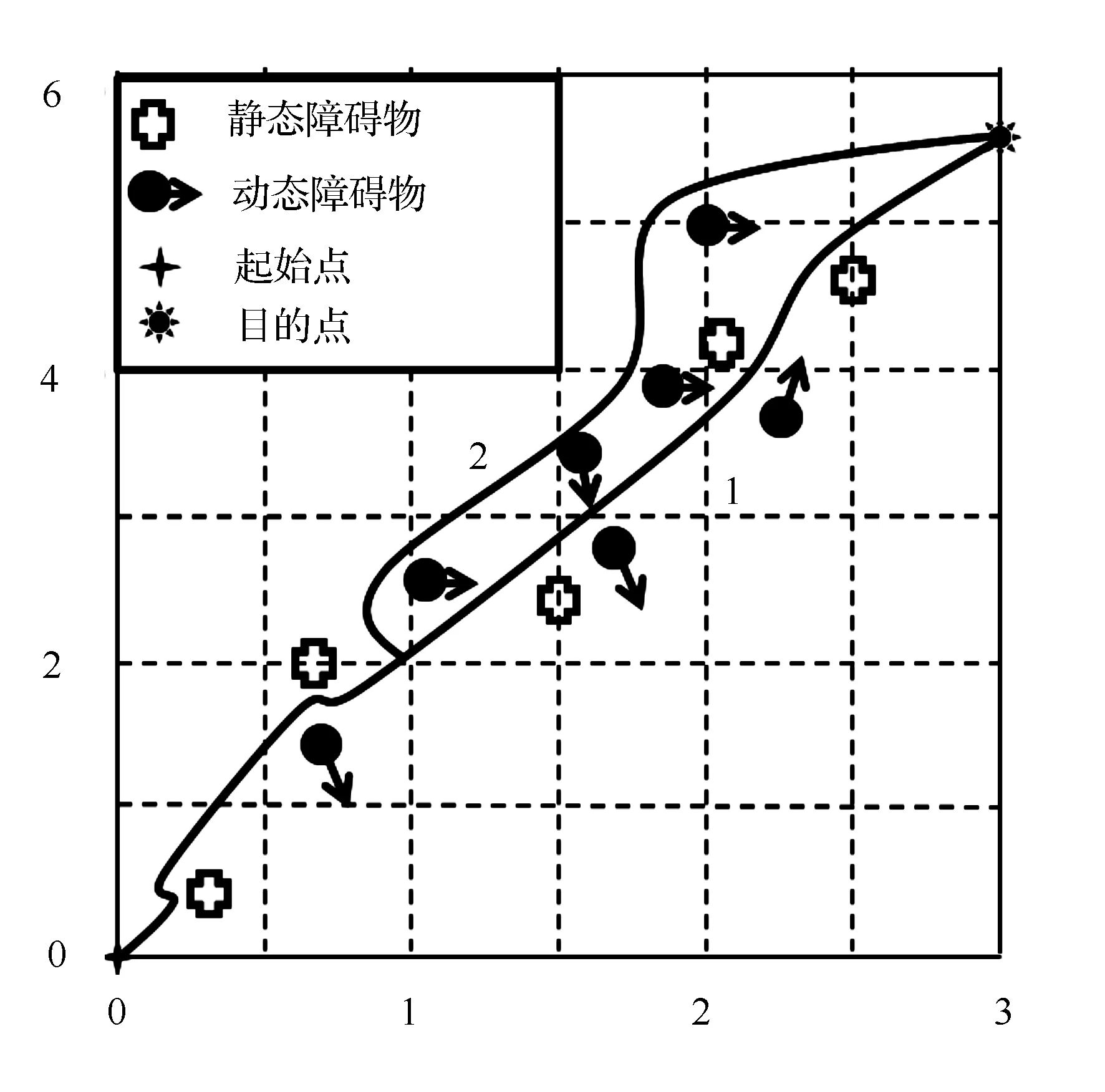
1为静态路径;2为动态路径。
对于机器人的避障,特别是对动态障碍物,在机器人的视觉系统中引用了CCD摄像头,使机器人能够实时有效的了解环境信息;但是,这也同时增加了控制器的工作负担。为了避免控制器因此出现响应不及时的现象,采用了多CPU并行处理器,即用DSP处理各种图像问题,包括图像分割、图像识别、图像定位。最后,通过前面机器人视觉系统对环境的反馈信息,对机器人的路径规划,提出了基于遗传算法的路径设计,着重阐述了路径的设计和遗传算法的操作。试验和仿真结果进一步说明了本设计的合理性和有效性。
在智能清洁机器人研究方面,还需进一步的深入:①如何设计新的检测系统,使智能机器人的视觉系统能够更敏感,获取更多的有用的信息,使之拥有更加丰富的信息量,进而使机器人系统对所处环境有更加全面“认知”。②研究更加合理的图像处理方案,构建更加完善的图像处理系统,使机器人能够提取出更加清楚详细的环境信息,以优化机器人的路径规划。③研究机器人在非结构化环境下,如何实现自主定位以及导航技术在该方面的应用。
[1] 甘人民.家具生产中应注意的防火问题[J].江西化工,2005(3):120-122.
[2] 李坚.木材对环境保护的响应特性和低碳加工分析[J].东北林业大学学报,2010,38(6):111-114.
[3] 王秋颖,周峰,李贵君.炼胶车间粉尘和烟气的危害及防治措施[J].橡塑技术与装备,2013,39(6):61-63.
[4] 赵建光,金维洙.木材加工企业的粉尘污染及防治措施[J].林业机械与木工设备,2008,36(12):52-54.
[5] 侯克忠,王秀兰.木材工业除尘技术的研究[J].东北林业大学学报,1986,14(3):51-56.
[6] 朱孝生,蔡力平.微机在木材加工车间气力吸尘装置设计计算中的应用[J].东北林业大学学报,1987,15(增刊):8-13.
[7] 汤天骄.基于DSTAR和神经网络的未知环境移动机器人路径规划方法[D].哈尔滨:哈尔滨工业大学,2010.
[8] 王勇.智能仓库系统多移动机器人路径规划研究[D].哈尔滨:哈尔滨工业大学,2010.
[9]Besada-PortasE,TorreL,CruzJM,etal.EvolutionarytrajectoryplannerformultipleUAVsinrealisticscenarios[J].RoboticsIEEETransactionson,2010,26(4):619-634.
[10] 梁家海.机器人在已知三维自然环境中的路径规划算法[J].计算机工程与科学,2011,33(6):2452-2454.
[11] 辛江慧.探测车自适应障碍识别与路径规划研究[D].南京:南京航空航天大学,2009.
[12] 马勇.多移动机器人路径规划研究[D].武汉:华中科技大学,2012.
[13] 杨斌.基于DSP的小型视觉履带机器人研究[D].昆明:昆明理工大学,2012.
[14] Yang Fang, Wang Chaoli. Adaptive Stabilization for uncertain nonolonomic dynamic mobile robot based on visual serving feedback[J]. Acta Auto Matica Sinica,2011,37(7):857-864.
[15] Bassiou N, Kotxopoulos C. Color image histogram equalization by absolutediscounting back-off[J]. Computer Vision and Image Understanding,2007,107(1/2):108-122.
[16] 孙靖.用于区间参数多目标优化问题的遗传算法[D].徐州:中国矿业大学,2012.
[17] 刘传领.基于势场法和遗传算法的机器人路径规划技术研究[D].南京:南京理工大学,2012.
[18] 程方晓.基于自适应保持多样性遗传算法的汽车动力传动系多目标优化[D].长春:吉林大学,2011.
[19] Zhang Daiyuan. Training algorithm for neural networks based on distributed parallel calculation[J]. Acta Auto Matica Sinica,2010,32(2):385-391.
[20] 于清晓.轮式餐厅服务机器人移动定位技术研究[D].上海:上海交通大学,2013.
[21] 杨莉.RoboCup小型组足球机器人路径规划关键技术研究[D].武汉:武汉理工大学,2012.
Wood Processing Workshop Floor Cleaning Robot Dynamic Obstacle Avoidance Path Planning Research/
Zhou Hongwei, Sun Liping, Dai Liangxia, Guo Tingting(Northeast Forestry University, Harbin, 150040, P. R. China)//
Journal of Northeast Forestry University.-2014,42(6).-143~147
Wood processing workshop; Cleaning robot; Dynamic obstacle avoidance; Path planning
周宏威,男,1982年2月生,东北林业大学机电工程学院,博士研究生。E-mail:easyid@163.com。
孙丽萍,东北林业大学机电工程学院,教授。E-mail:zdhslp@163.com。
2013年12月31日。
S776.034
1) 东北林业大学大学生创新项目(JD201301)。
责任编辑:张 玉。
猜你喜欢
卫星应用(2022年7期)2022-09-05
卫星应用(2022年3期)2022-05-23
卫星应用(2022年1期)2022-03-09
煤气与热力(2021年12期)2022-01-19
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
环球慈善(2019年6期)2019-09-25
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28
