基于两步估计的空间非合作目标相对轨道确定方法研究
2014-08-09 22:19车汝才
航天控制 2014年3期
车汝才
北京控制工程研究所,北京100190
基于两步估计的空间非合作目标相对轨道确定方法研究
车汝才
北京控制工程研究所,北京100190

研究运行于椭圆轨道的卫星相对轨道确定问题,适用于配置有非合作测量敏感器的卫星。首先给出了以相对运动状态描述的椭圆轨道相对运动方程(T-H方程),并给出了解析解;其次根据星间测量几何关系对应的测量方程,提出一种新的基于两步估计的相对轨道确定方法;最后通过数学仿真对算法的有效性进行了验证。
两步估计;非合作目标;相对轨道确定;椭圆轨道;卫星
对空间非合作目标跟踪飞行可以进行实时观测或监视[1],国外很早就开展了相关研究,如美国XSS系列卫星具有自主交会对接、轨道监视、以及围绕目标近距离机动等能力[2],美国AeroAstro公司提出的Escort微小卫星能够对空间目标进行在轨监视、逼近等,沿航向对目标进行跟踪飞行并实现三维观测[3]。因此,跟踪空间非合作目标在军事、商业和科学等领域具有广泛的应用前景。
若追踪星能利用星载测量设备完成自主相对轨道确定,则可对在轨自主轨道跟踪或构型保持任务提供重要的依据。利用相对距离、方位角和俯仰角测量信息来确定相对轨道信息,已有很多学者开展了研究,如文献[4-5]分别针对圆轨道C-W方程利用Kalman滤波和EKF算法研究了编队飞行的相对轨道确定问题;文献[6]针对非合作目标相对导航问题提出了粒子滤波算法,但是系统模型都局限于C-W方程;文献[7]根据非线性系统方程提出了EKF算法,但是算法收敛速度略慢。对于空间非合作目标跟踪任务,算法的收敛速度将是值得考虑的因素。
考虑到非合作目标的轨道具有一定任意性,利用圆轨道模型的C-W方程将有一定的局限,模型误差较大。因此本文从一般性出发,针对椭圆道卫星的相对轨道确定问题进行了研究,提出了采用椭圆轨道T-H方程进行相对轨道确定的思路。在测量信息选择方面,根据常用的几类相对导航敏感器,如微波测距仪、可见光相机、激光雷达等,采用相对距离、方位角和俯仰角作为系统测量信息,并针对相对轨道确定算法的快速收敛问题,提出一种新的基于两步估计的相对轨道确定方法,该算法收敛速度快,最后通过数学仿真对算法有效性进行了验证。
1 椭圆轨道卫星相对运动方程
首先定义如下坐标系:
1) 地心惯性坐标系OXYZ:坐标系原点O为地心,X轴指向春分点,Z轴指向北极,Y轴按右手法则确定;


图1 空间坐标系示意图
1.1 卫星相对运动方程
参考轨道坐标系原点位于追踪星质心,并设追踪星和目标星在地心惯性系中的位置矢量分别为rc和rt,目标星相对于追踪星的位置矢量ρ在参考轨道坐标系中坐标为[x,y,z]T,则
(1)
求取式(1)对时间的二阶导数:

(2)

(3)
若目标星与追踪星间的相对距离ρ≪rc,可忽略二次以上高阶项,整理得到理想二体轨道运动假设下相对运动方程[8](T-H方程):
(4)
式中,η=1+ecosθ,e为轨道偏心率。将对时间的导数转换为对真近点角θ的导数,可将T-H方程从时域转换至θ域,并写成状态方程的形式:
(5)
(6)
T-H方程是线性方程,其模型误差取决于相对距离与地心距的比值,比值越小误差也越小。
1.2 卫星相对运动方程解析表达式
引入变量X=[x,y,z,x′,y′,z′]T,在理想二体假设下,T-H方程存在如下解析解[9]:
X(θ)=ΦX(θ0)=ΦaΦbX(θ0)
(7)
(8)
(9)
其中,
φa11=esinθ,φa12=2e2H(θ)sinθ-eη-2cosθ,
φa13=-cosθ,φa21=η,φa22=2eηH(θ),
φa23=(1+η-1)sinθ,φa24=η-1,
φa35=η-1sinθ,φa36=η-1cosθ,φa41=ecosθ,
φa42=2e2H(θ)cosθ+2e2H′(θ)sinθ+
eη-2sinθ-2e2η-3sinθcosθ,
φa43=sinθ,φa51=-esinθ,
φa52=2e[H′(θ)-eH(θ)sinθ+eH′(θ)cosθ],
φa53=(1+η-1)cosθ+eη-2sin2θ,
φa54=eη-2sinθ,φa65=η-1cosθ+eη-2sin2θ,
φa66=eη-2cosθsinθ-η-1sinθ,
φb11=e-1sinθ0,φb14=e-1cosθ0,
φb31=-2e-1η0,φb32=sinθ0,φb35=-e-1η0,
φb42=(1+η0)cos2θ0-1,
其中,
(10)
E为偏近点角,dH保证H(θ0)=0。
2 基于两步估计法的相对轨道确定
2.1 相对轨道测量方程
在对空间非合作目标进行测量时,一般采用微波雷达、光学相机等设备获取相对距离ρ、方位角α和俯仰角ε信息,图2为测量示意图。本文主要研究相对轨道确定算法,因此不对姿态确定作详细讨论,选择相对位置和相对速度作为估计变量,根据空间几何关系,测量值ρ,α和ε可表示为
(11)

图2 相对轨道测量示意图
2.2 基于两步估计的相对轨道确定

(12)


两步估计法可以更好地利用有效的测量信息,提高状态估计的精度,其中的迭代计算有助于消除初始误差带来的影响。下面给出其具体计算公式。
第1步估计可由如下方程进行描述:
(13)
式中,
(14)
(15)
由于第1步估计的测量方程为线性方程,利用卡尔曼滤波可求出Yk的最优估计值

(16)
(17)
(18)
其中,ek为第2步估计的测量噪声,其协方差矩阵为Pyk。式(18)为非线性方程,可以利用Gauss-Newton算法求其最优解,迭代计算公式如下
(19)

(20)
需指出第2步估计必须在第1步估计的测量更新和时间更新之间进行。图3给出了两步估计算法的详细计算流程。

图3 两步估计法计算流程图

(21)
其中,K为采样数。
3 仿真算例
卫星初始轨道根数如表1,仿真中考虑J2摄动,假设相对距离测量精度10m,方位角和俯仰角测量精度均为0.01°,测量采样周期1s。系统动态噪声协方差阵Q=diag{0.1,0.1,0.1,0.1,0.1,0.1},测量噪声协方差阵R=diag{102,3×10-8,3×10-8},初始状态协方差阵MX1=diag{108,108,108,108,108,108}。仿真时间为1个轨道周期,同时采用两步估计和EKF两种方法进行比较。
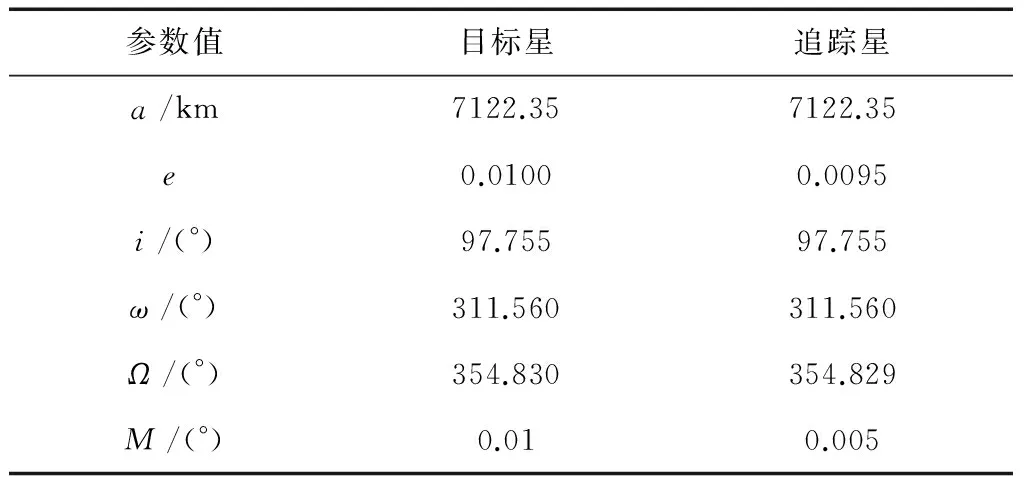
表1 初始轨道参数
图4~5给出整个仿真周期内相对位置估计误差和相对速度估计误差曲线。为了便于分析,图6~7给出仿真初期50s内相对位置估计误差和相对速度估计误差的变化曲线。可以看出,两步估计算法的初始收敛速度快于EKF算法。图8~9给出仿真末期1000s内相对位置估计误差和相对速度估计误差曲线,滤波算法精度与敏感器测距精度和测角精度有关。仿真表明,两步估计算法的相对位置估值和相对速度估值基本趋于稳定,EKF算法的相对位置估值已稳定,但相对速度估值仍有一定偏差,但从总体趋势来看,也将逐渐收敛。

图4 相对位置估计误差(整个仿真周期)
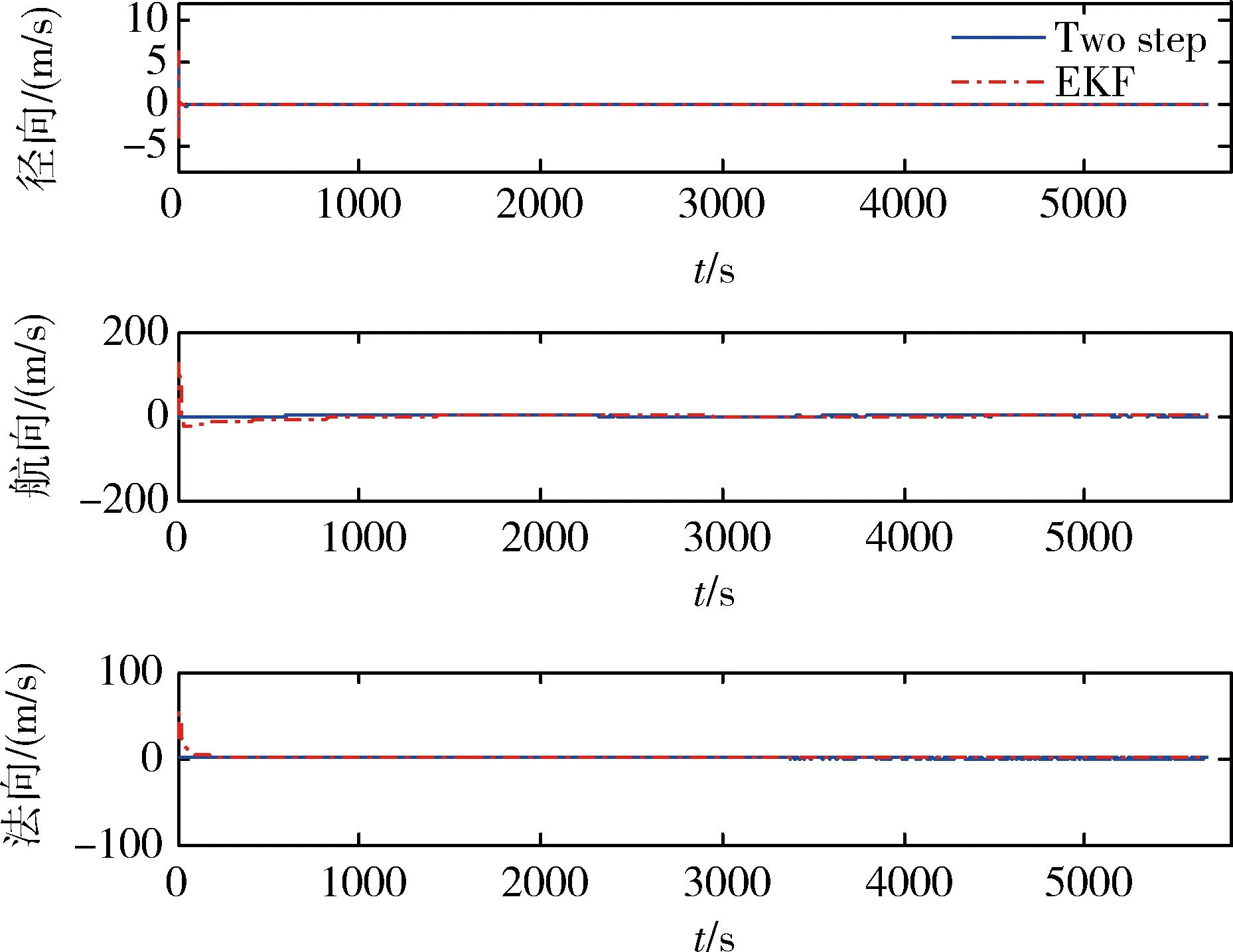
图5 相对速度估计误差(整个仿真周期)

图6 相对位置估计误差(仿真初期50s)

图7 相对速度估计误差(仿真初期50s)

图9 相对速度估计误差(仿真末期1000s)
为了验证两步估计算法的有效性,对两步估计算法和EKF算法同时进行50次Mente-Carlo仿真。仿真末期的相对位置误差和相对速度误差统计结果见图10~11。统计结果表明,在相同的仿真时间内,两步估计算法的计算精度优于EKF算法计算精度。

图10 相对位置估计误差统计
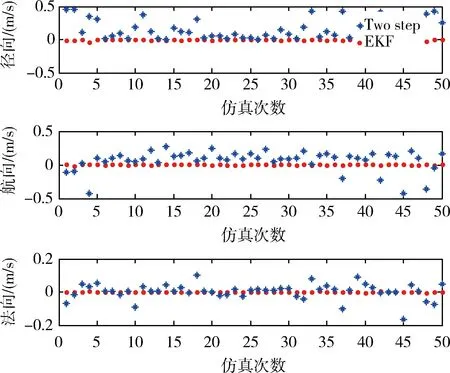
图11 相对速度估计误差统计
以上仿真结果表明两步估计算法收敛速度快于EKF算法,而且两步估计算法对初始状态的选取不敏感,具有一定的鲁棒性。对于空间非合作目标跟踪任务来讲,算法的快速收敛性将是一个明显的优势,能为跟踪星后续的制导控制提供有利的时机。由于两步估计法需要一定的迭代计算,计算量较扩展卡尔曼滤波大。考虑到目前星载计算机的计算能力大幅提升,足以满足两步估计算法的计算量。因此,两步估计算法在未来空间非合作目标跟踪问题上将有一定的应用前景。
4 结论
研究了椭圆轨道卫星跟踪空间非合作目标的相对轨道确定问题,利用相对轨道状态描述的相对运动方程(T-H方程),提出一种基于两步估计的相对轨道确定方法,该方法收敛速度快、精度较高,对于快速跟踪非合作目标具有一定应用价值。考虑到计算模型中未考虑地球形状摄动的影响,对算法的估计精度有一定影响,后续还需进一步深入研究。
[1] Toso A R. System-Level Feasibility Analysis of A Microsatellite Rendezvous with Non-cooperative Target [D]. Master thesis, Air Force Institute of Technology,2004.
[2] Thomas M D, Baker M T L, Belchak T A, Larsen W R. XSS-10 Micro-Satellite Flight Demonstration Program[C]. The 17thAnnual AIAA USU Conference on Small Satellite,Utah,SSC03-1-IV-1, Aug., 2003.
[3] Aaron J, Thomas W Vaneck. AeroAstro’s Escort-A Microsatellite for On-Orbit Inspection of Space Assets[C]. The 17thAnnual AIAA USU conference on Small Satellite,Utah, SSC03-IV-7, Aug., 2003.
[4] 张洪华,林来兴.卫星编队飞行相对轨道的确定[J].宇航学报, 2002, 23(6): 77-81.(Zhang Honghua, Lin laixing. The Determination of Relative Orbit for Satellites Formation Flying [J]. Journal of Astronautics , 2002, 23(6): 77-81.)
[5] 雪丹,曹喜滨,吴云华.多星编队相对轨道的自主确定[J].宇航学报, 2006, 27(6): 1406-1408.(Xue Dan, Cao Xibin, Wu Yunhua. Autonomous Determination of Relative Orbit for Multi-satellite Formation[J]. Journal of Astronautics, 2006, 27(6): 1406-1408.)
[6] 金煌煌,温奇咏,夏红伟,王常虹.空间非合作目标的相对导航粒子滤波算法[J].空间控制技术与应用, 2009, 35(4): 6-11.(Jin Huanghuang, Wen Qiyong, Xia Hongwei,Wang Changhong. Particle Filter Algorithm for Relative Navigation of Space Non-Cooperative Target[J].Aerospace Control and Application, 2009, 35(4): 6-11.)[7] 刘涛,解永春.非合作目标交会相对导航方法研究[J].航天控制, 2006, 24(2): 48-53.(Liu Tao,Xie Yongchun. A Study on Relative Navigation for Spacecraft Rendezvous with a Noncooperative Target [J]. Aerospace Control, 2006, 24(2): 48-53.)
[8] Inalhan G, Tillerson M, How J P. Relative Dynamics and Control of Spacecraft Formations in Eccentric Orbits [J]. Journal of Guidance, Control and Dynamics, 2002, 25(1): 48-59.
[9] 于萍, 张洪华.椭圆轨道编队飞行的典型模态与构型保持控制方法[J].宇航学报, 2005, 26(1): 7-12. (Yu Ping, Zhang Honghua. Representative Formation-Keeping Mode and Control for Spacecraft in Eccentric Orbits[J]. Journal of Astronautics, 2005, 26(1): 7-2.)
[10] Haupt G T, Kasdin N J, Keiser G M, Parkinson B W. Optimal Recursive Iterative Algorithm for Discrete Nonlinear Least Squares Estimation[J]. Journal of Guidance, Control and Dynamics,1996,19(3): 643-649.
The Relative Orbit Determination for Non-cooperative Target Based on Two-step Estimator
CHE Rucai
Beijing Institute of Control Engineering, Beijing 100190,China
Therelativeorbitdeterminationofellipticorbitsatelliteisdiscussedinthispaper,anditcanbeusedforthenon-cooperativetargetmeasuringandtracking.Firstly,therelativemotionbetweenthechaserandtargetinarbitraryellipticorbitisdescribedbyusingTschauner-Hempelequations.Thehomogenoussolutionoftheseequationscanbeobtainedduetotheeccentricanomaly.Secondly,basedonthethegeometricrelationbetweenthechaserandthetarget,anewtwo-stepestimatorispresentedfortherelativeorbitdetermination.Thesimulationresultsshowtheeffectivenessofthisproposedmethod.
Two-stepestimator;Non-cooperativetarget;Relativeorbitdetermination;Ellipticalorbit;Satellite
2013-07-08
车汝才(1979-),男,山西人,博士,高级工程师,主要研究方向为卫星相对运动动力学及控制技术。
V448
A
1006-3242(2014)03-0038-06
猜你喜欢
数学杂志(2022年5期)2022-12-02
中学生数理化·七年级数学人教版(2022年5期)2022-06-05
中学生数理化·七年级数学人教版(2021年5期)2021-11-22
中学生数理化(高中版.高二数学)(2021年12期)2021-04-26
空间科学学报(2020年6期)2020-07-21
新世纪智能(数学备考)(2020年12期)2020-03-29
空间科学学报(2020年6期)2020-01-08
环球时报(2019-12-05)2019-12-05
中学数学杂志(2019年1期)2019-04-03
福建中学数学(2016年4期)2016-10-19