
导航接收机功率控制参数优化与性能分析
2014-08-21 09:46陈道伟唐小妹李柏渝王飞雪
全球定位系统 2014年5期
陈道伟,唐小妹,李柏渝,王飞雪
(国防科技大学电子科学与工程学院卫星导航定位技术工程研究中心,湖南 长沙 410073)
0 引 言
近年来随着全球卫星导航定位技术的快速发展和普及,各种类型的便携式导航信号接收设备得到了极大的推广和应用。以卫星导航接收机为代表的导航终端产品,近年来得到了快速的发展和应用,其功能越来越强大,定位精度也越来越高。但是随着功能的逐渐增多,接收机算法的日趋复杂和先进,能量消耗也越来越大,而相应的电池的电量却并没有得到显著的提升。这对于接收机的可持续使用和低发热量都存在很大的问题,功耗问题已成为接收机设计的一个关键问题。
当前国外相关导航芯片、模块生产公司和研究机构,在低功耗控制技术方面拥有较为明显的优势,芯片功耗普遍在十几毫瓦的级别,最低可低于10 mW.相比之下,国内导航芯片和模块的生产机构,在低功耗设计方面还存在较大的差距,相关专利和技术相对较少,终端产品的功耗普遍在80 mW以上,严重制约了产品的竞争力。目前国内外对于导航接收机功耗控制技术的研究,主要可以划分为两类,一类是静态功率控制技术[1],它主要通过对接收机内部模块的合理调度和安排,达到降低功率消耗的目的,同时使接收机定位性能保持在较高水平。另一类则是动态功率控制技术[2],它的基本原理是在满足需求的前提下,动态地调整接收机的工作频率和电压,以此来实现功率控制的目标。但是目前动态技术还未实现广泛深入的应用[3]。
对于实际应用的静态功率控制技术,目前尚未有文献对其原理和性能优化进行研究和分析,本文从该角度入手对其功率控制原理和参数进行了建模和分析,在功耗最低和不影响性能的优化目标下,给出了功率控制的最优时间参数选择,并且最后利用实验验证了该方法,并分析了功率控制对性能的基本影响情况。
1 接收机基本功率控制方式和原理
在导航接收终端低功耗研究设计方面,目前国外的CSR,U-blox等公司处于技术领先水平,不仅可以实现极低的功耗,而且还能保持较高的灵敏度。
1.1 CSR功率控制技术
CSR的前身为著名的SIRF公司,其前两代产品功耗较高,不便于集成在便携式终端载体上,从第三代导航产品SIRFstarIII芯片开始通过引入先进的功率控制模式[4]包括:自适应省电模式(ATP)、强制定位模式(PTF)、先进功率管理模式(APM),这些模式的应用使得定位芯片功耗得到大幅降低,可以直接集成在便携式终端等载体上例如手机、pad等。
省电模式,是指接收机周期性地开启进行定位解算,在获得位置信息后,又关闭接收机的大部分模块使接收机处于低功耗状态,即接收机在不定位的时候,维持待机状态,以此来节省功耗,具体过程如图1所示。省电模式适用于那些信号强度较好且需要频繁(周期1~10 s)更新定位结果的环境。而对于弱信号场景,在省电模式下接收机容易失锁信号,为了保持接收机的定位的可用性提出了自适应省电模式,即接收机在信号强度较低时,转入连续工作状态,以此来保证对信号的持续跟踪和定位解算。相比于接收机连续实时的跟踪解算,省电模式节省了多余的跟踪过程中所消耗的功率。
接收机在省电模式下需要保存前一次的定位结果,同时还需要对内部核心寄存器、RTC(实时时钟)和RAM(随机存储器)保持1 mA左右的电流供应并对RTC时间进行告警编程,以便下次叫醒接收机重新工作。
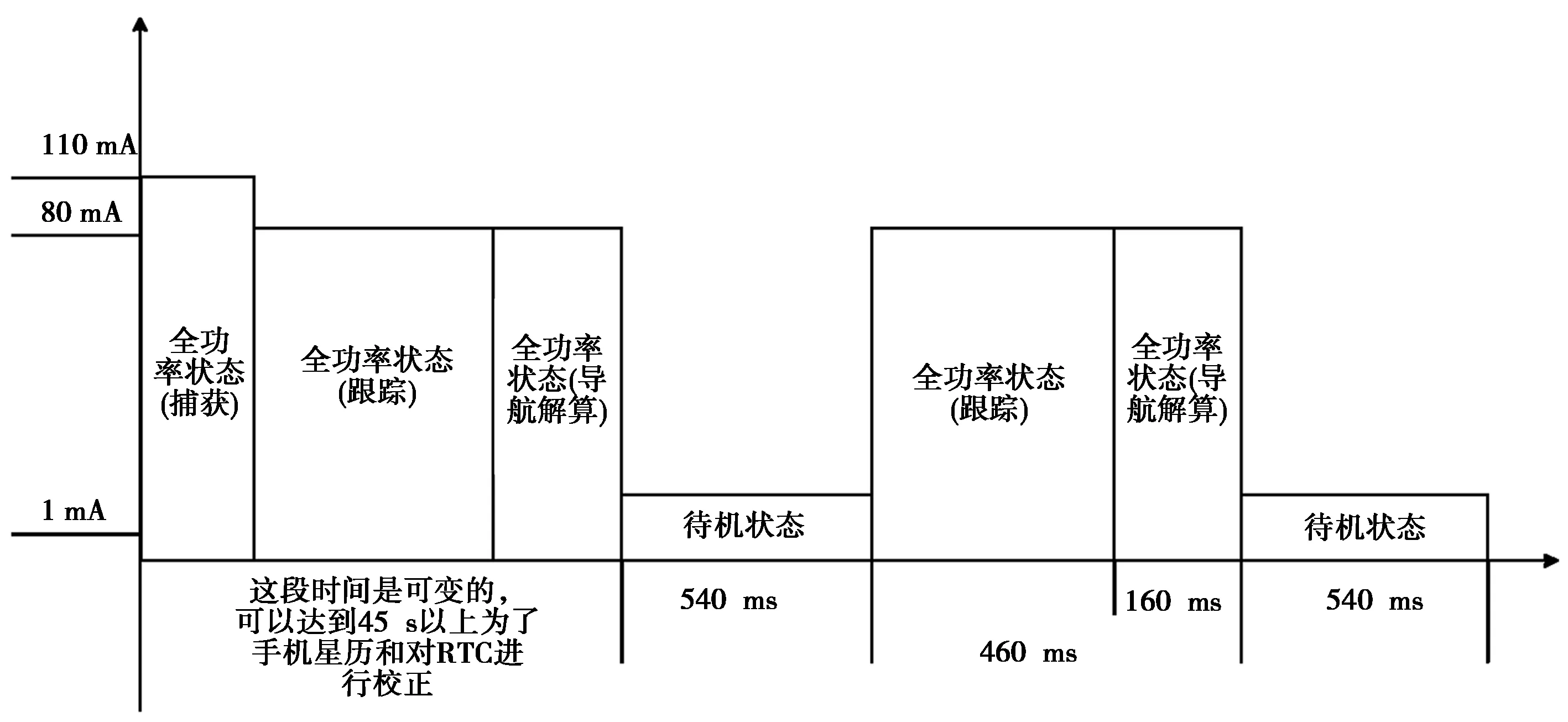
图1 SIRF III 省电模式
强制定位模式,是指接收机以较长的时间间隔周期性地更新定位结果,更新周期一般为几分钟、几十分钟、甚至几小时,适用于不需要频繁更新定位结果的场景。在定位解算过程中,接收机更新位置、时间等信息并收集星历数据,在获得位置信息后则进入低功耗的待机状态。在待机状态下,当某个时刻用户需要获取位置时可快速恢复定位,即可强制进行定位解算。相比于连续定位模式和省电模式,强制定位模式下功耗可以得到大幅降低,基本流程如图2所示。

图2 SIRFIII 强制定位模式
先进功率管理模式,适用于移动无线设备位置获取过程中的功耗控制,它给予了用户更多的设置选项,允许用户在服务质量(QoS)和定位时间间隔之间灵活选择,服务质量主要为定位误差和功耗节省比例。
SIRFstarIV芯片在SIRF III功率控制的基础上增加了自适应微功耗控制器[5],集成了各种传感器包括温度传感器、陀螺仪、磁力计等,可以始终保持热启动状态,并能对温度变化进行监视以及对运动状态进行探测,可将接收机功耗维持在一个极低的水平。最新的SiRFatlasVITM则定义了深睡眠模式、休眠模式、待机模式、正常模式[6],其中深睡眠模式只对时钟供电,休眠模式则对I/O(输入/输出)内存和时钟供电,待机模式则开启CPU和时钟及I/O,正常模式则对所有器件完全供电。
1.2 U-blox功率控制方式
U-blox公司最新的导航芯片U-blox 7芯片定义了两种功率控制模式:连续模式(Continuous Mode)和功率节省(PSM)模式[7]。
连续模式是连续的正常供电,当位置可以被计算并且有足够的卫星数目被跟踪时,关闭捕获模块以节省功耗,如果接收机不能再计算位置或者跟踪的卫星信号小于4颗,则重新开启捕获模块进行重捕获。
功率节省模式通过选择性转换接收机部分模块的开启和关闭来减少系统功耗,分为循环跟踪和开启/关闭两种操作,前者以较短的周期(1~10 s)更新定位结果,在两次定位之间只用极低的功耗保持跟踪模块的开启,有较高的跟踪灵敏度;而后者则简单地开启和关闭大部分器件,使接收机处于低的或者是几乎没有系统活动的水平,功耗节省比例较高,适用于定位结果不频繁更新的场景,周期可以为几分钟、几小时甚至几天。对于开启/关闭操作,其流程图如图3所示。
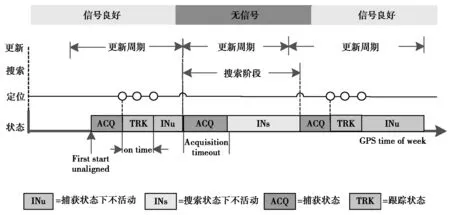
图3 开启/关闭下流程图
而在循环跟踪操作下,其流程图如图4所示:
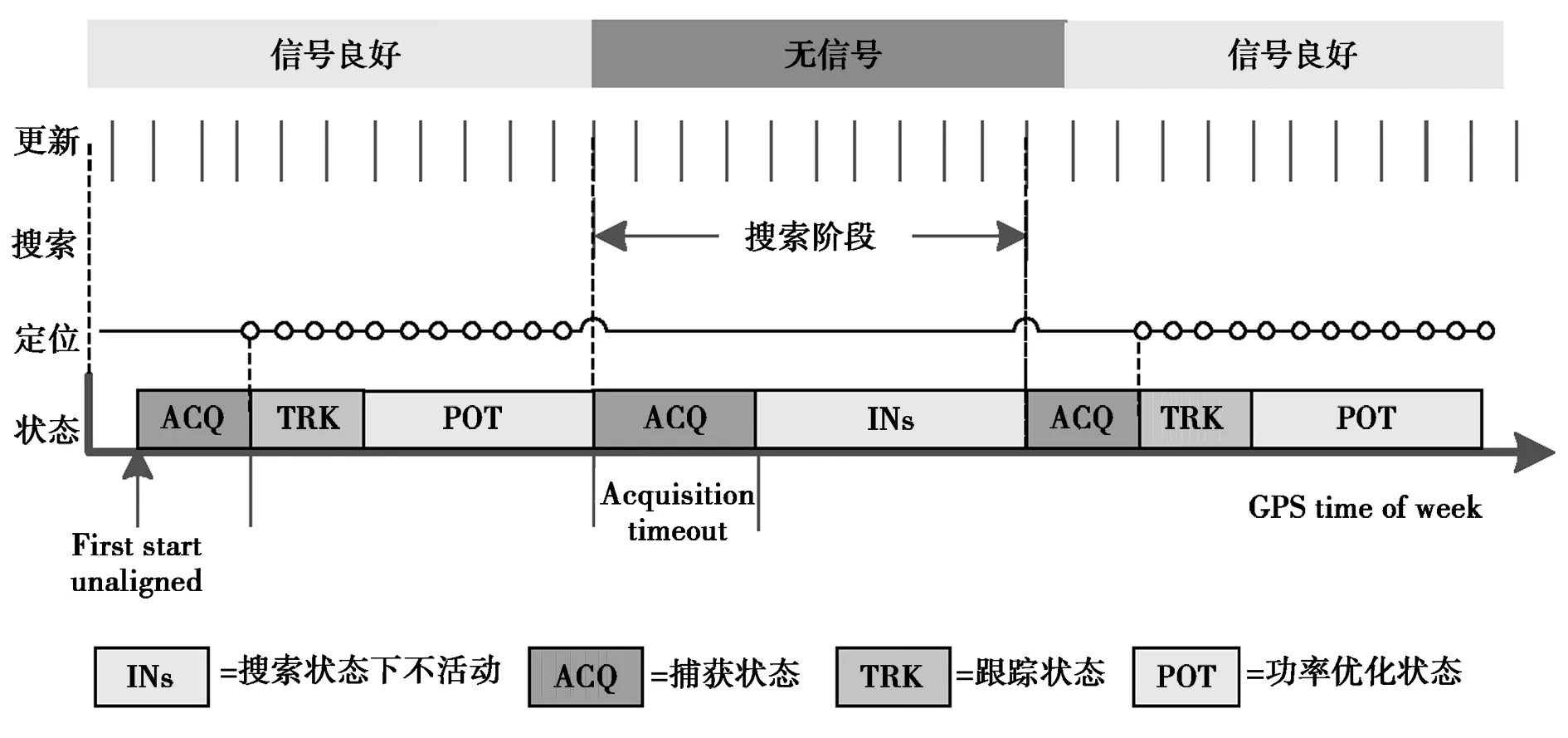
图4 循环跟踪下流程图
从图4可以看出,在信号质量好时,跟踪状态后的处理为功率优化跟踪(POT),可以保持较低的跟踪功耗,同时又不会丢失信号,这是循环跟踪操作与开启/关闭操作的主要区别。
1.3 功率控制性能模型
从上述U-blox和SIRF的功率控制技术来看,两者技术原理大致相似都是通过周期性地开启和关闭器件来节省功耗,可分为短周期和长周期的功率控制。
对于功率控制性能模型的评估和建立,可以从每个循环周期消耗的平均电流的大小来衡量,公式为
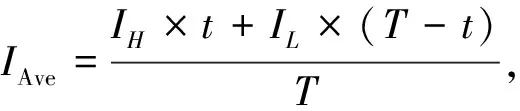
(1)
式中: 总的循环时间为T,对于省电模式T为1~10 s,强制定位模式为10 s~2 h; 每次定位解算的时间为t,T-t为待机时间;IH为定位解算过程中消耗的平均电流,包括跟踪(Itrack)、导航解算(Inav)消耗的两部分电流;而IL为待机状态下消耗的电流。
(2)
从上式可以看出,功率节省的大小与时间参数的选择有重要的关系,特别是在总的循环时间T一定的前提下,待机时间或者接收机不活动的时间T-t所占的比重越大,则功耗节省的比例越高,节省的能量越多。但是并不能无限压缩定位解算时间t,因为其会对接收机的正常工作和性能造成影响。
2 功率控制参数与性能分析优化
从以上分析可知,寻找最优的时间参数是接收机进行功率控制的关键。下面以CSR的功率控制技术为基础,分析最优的时间参数的选择与设置。
2.1 时间控制参数优化
对于SIRF功率控制技术,其主要的时间参数包括待机时间(Trickle time)、跟踪时间(Tracking time)、定位解算时间(Navigating time),在每一个循环周期内重复进行上述三个过程。在省电模式下其循环周期为1~10 s之间,为了便于分析以接收机典型的1 s/次的定位周期为例进行分析,具体参考图1。
时间参数优化的准则是在不影响接收机正常工作和性能的前提下,最大化地降低接收机的功率消耗,即要使上式(1)的平均电流最小。而对于待机时间、跟踪时间和定位解算时间,在总的循环时间固定的前提下,就是要寻找最大的待机时间,使其满足上述优化准则。
对于定位解算时间,由于最小二乘算法计算量固定,在处理器工作频率一定的情况下,定位解算所花费的时间一般是一个固定值,如图1中的160 ms,要想进一步压缩定位解算时间需要进行算法计算量优化或者采用简化算法。因此寻找最大的待机时间的问题,即可以转化为寻找最小的环路跟踪时间。
对于最优环路跟踪时间的约束是,接收机在重新开启跟踪后,能够在该时间内迅速收敛到稳定的状态,此时输出的测量值才是稳定可靠的,否则将造成较大的误差。而接收机能够收敛的前提条件是,输入的载噪比满足最低的跟踪灵敏度,并且动态应力和测量误差不会使环路失锁。
因此根据优化参数、目标公式和约束条件,对最优的跟踪时间优化问题可用下面模型描述
(3)
式中:CNR0为跟踪灵敏度门限值,载噪比CNR应大于此门限值;v为接收机动态应力;σPLL为环路相位测量误差均方差,输入的动态应力和测量噪声应使其满足小于150的门限值;G为目标函数;t为需要求解的最优时间参数。
求解t的目标函数G并没有完整的解析公式,其主要由两部分约束构成,一部分是前述的公式(1),另一部分则是环路要能收敛到稳态。而环路跟踪收敛的时间长短与环路的暂态响应有重要关系,在待机状态后接收机可能会经历相位阶跃、频率阶跃等动态变化,最优跟踪时间t应满足在遇到上述动态变化仍能重新跟踪收敛。下面从锁相环暂态响应的角度分析环路在外界激励下趋于稳态所需花费的时间,设定条件为输入载噪比为50 dB-Hz, 动态性为低速静止,环路能够实现正常的稳定跟踪。
对于接收机典型常用二阶锁相环路,其系统函数H(s)为[8]
(4)
式中,ξ和wn分别为阻尼系数与特征频率,考虑到接收机的待机时间较短,主要经历的动态应力为相位阶跃和频率阶跃激励。对二阶锁相环进行相位阶跃激励下的暂态响应分析,可得如图5所示结果。
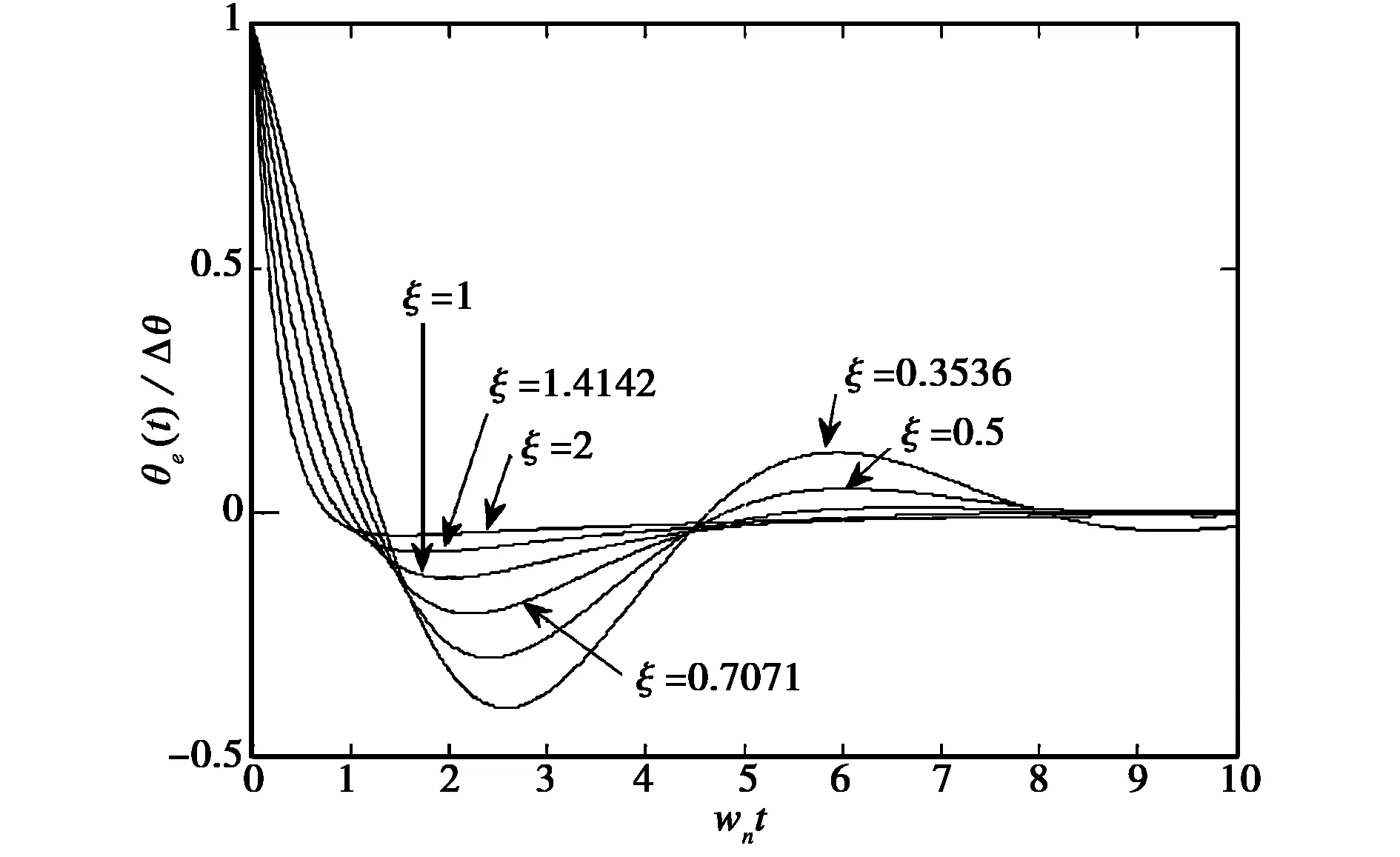
图5 二阶锁相环在相位阶跃激励下的暂态响应
从图5中可知,当wnt大于6时相位跟踪误差开始收敛进入稳定状态,由二阶锁相环最优参数设置BL=0.53wn可知,当噪声带宽BL为典型的15 Hz时,那么相应的特征频率wn=28.301 9,此时至少需要时间t=(6×0.55)/BL=212 ms才能进入稳定的收敛状态。同理当噪声带宽BL为10 Hz时,则至少需要时间t=318 ms才能进入收敛状态。接收机噪声带宽BL的选择需要兼顾动态性和噪声滤除一般在10 Hz以上,因此对于相位阶跃激励下二阶锁相环的收敛时间至少需要300 ms以上。
对于频率阶跃激励下的二阶锁相环暂态响应,如图6所示。从图中可以看出当wn=5时幅度最大,此时在时间t=250 ms后频率跟踪误差开始进入稳定收敛状态,当wn=10时大约从跟踪时间t=120 ms后开始进入收敛状态。由于BL不会小于5 Hz,因此其wn至少大于9.434 0(5/0.53=9.434 0),对于频率阶跃激励的收敛时间要求至少需要120 ms以上。
综上所述,对于省电模式下的接收机,其从待机状态进入定位解算过程中,载波环跟踪的时间至少需要下式所求得的时间长度才能收敛。
t=(6×0.53)/BL.
(5)
考虑到动态性BL一般在10 Hz以上,因此,至少需要300 ms以上的时间才能进入稳定状态。
对于省电模式下循环更新周期,其功率控制最优的时间参数选择如表1所示,对于2 s或者2 s以上的循环周期,可适当延长跟踪时间以适应动态应力的变化,以此可达到最优的功耗节省。
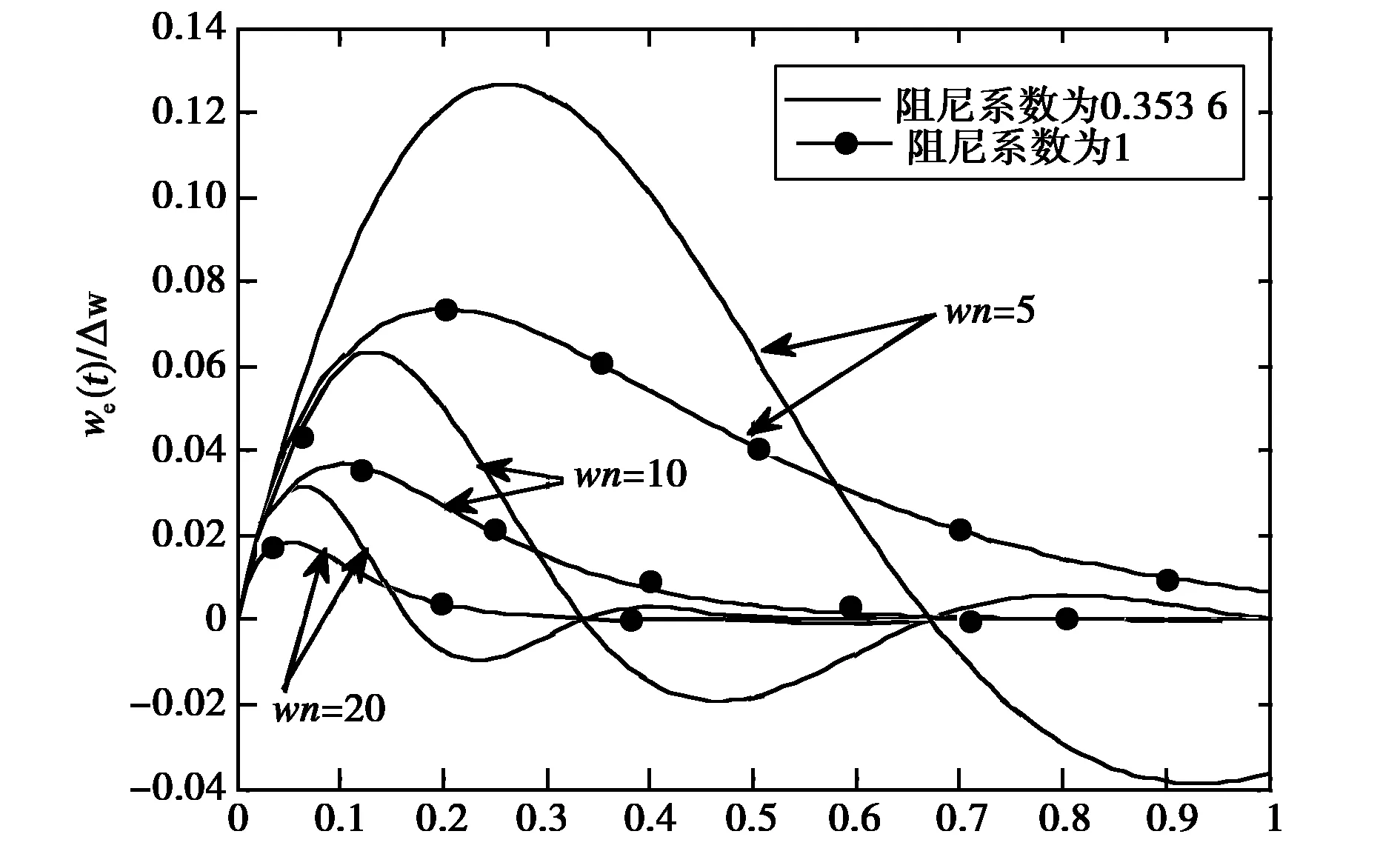
图6 二阶锁相环对频率阶跃的响应
表1最优时间参数选取
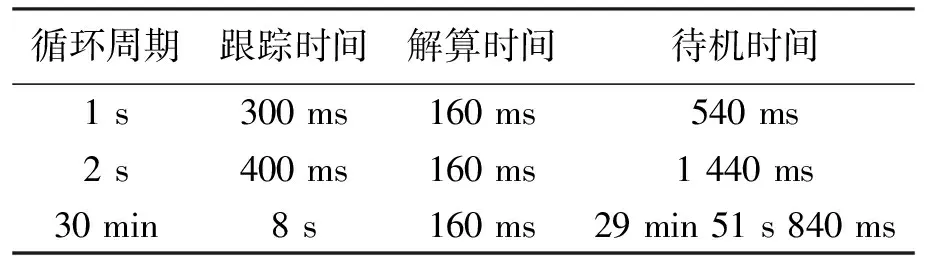
循环周期跟踪时间解算时间待机时间 1 s300 ms160 ms540 ms 2 s400 ms160 ms1 440 ms 30 min8 s160 ms29 min 51 s 840 ms
对于长周期下的强制定位模式,由于定位结果更新的时间间隔较长(10 s~2 h),此时接收机经历的动态性、卫星的星座变化及不可以预知的因素较多,因此接收机从待机状态重新进入跟踪和解算阶段时,接收机需要重新进行捕获跟踪信号即需要进行热启动,例如图2中其更新周期为30 min而从待机状态重新进行跟踪的时间为8 s.因此其跟踪的最短时间即为热启动的时间。
根据以上分析结果,可对不同的种类和参数的接收机选择设计适合自身的合理的功率控制时间参数。
2.2 功率控制对性能的影响分析
功率控制虽然降低了功耗,但显然会对接收机性能产生影响,主要影响的性能包括:定位时间和定位精度。
2.2.1 对定位时间的影响
对于省电模式下的功率控制,由于其在待机的这段时间内因接收机没有连续跟踪信号,载波和伪码的频率、相位状态可能会由于动态应力的影响而产生变化,在下一次重新开启环路后,接收机需要花费额外的时间进行重新跟踪。相比于连续实时跟踪的情况,延长了极小量的定位时间。但如果经历较大的动态应力或者信号在极短的时间内衰落,则会对重新定位时间有较大的影响,甚至丢失信号不能进行定位。
对于强制定位模式下的功率控制,其定位结果更新周期为10 s~2 h,待机时间较长。在环路关闭的这段时间内,接收机和卫星的相对位置可能会发生较大的变化,卫星的可见性和信号的质量也有可能发生改变,甚至卫星的星历参数都可能进行了更新,因此当接收机重新开启进行位置更新时,定位时间相比实时跟踪将会大大延长,由于未知因素较多,接收机相当于进行热启动。但相对应的是,由于接收机待机的时间较长,节省的功耗比例也相应的越大。综上所述,功率控制降低了接收机的功率消耗,但同时也会对定位时间产生一定程度的影响。
2.2.2 对定位精度的影响
接收机定位精度主要与测量误差和卫星的几何分布有关,对于功率控制而言,其对卫星的几何分布影响较小,因此功率控制主要影响的是接收机的测量误差。而测量误差的大小与信号的强度有紧密的关系,当信号载噪比降低时,测量误差增大,此时接收机的定位精度将下降。
对于省电模式,其环路关闭的时间较短,在短时间内,信号强度的变化将不会是很剧烈的,因此当下次接收机重新开启进行跟踪定位时,由于没有连续跟踪,其灵敏度将下降,而定位精度也将会有轻微的损失。而对于强制定位模式,由于环路关闭的时间较长,环境因素变化较大,信号质量有可能遇到较大的变化,特别是当从室外进入室内等恶劣环境时,不仅定位精度也会下降,而且还可能出现无法定位的情况。
3 实验分析
为了更加清晰直观地显示功率控制对定位性能的影响情况,利用基于泰斗TD3020C的导航接收机和模拟信号源,在实验室环境下模拟生成导航信号并利用接收机进行接收,测试功率控制对接收机定位性能的基本影响情况。
3.1 测试定位时间与功率控制的关系
针对省电模式下的功率控制,调整Trickle 的时间范围,针对GPS的L1信号重复测试多组数据,得出定位时间与待机时间的关系,结果如图7、8所示。

图7 短周期待机时间与定位时间的关系
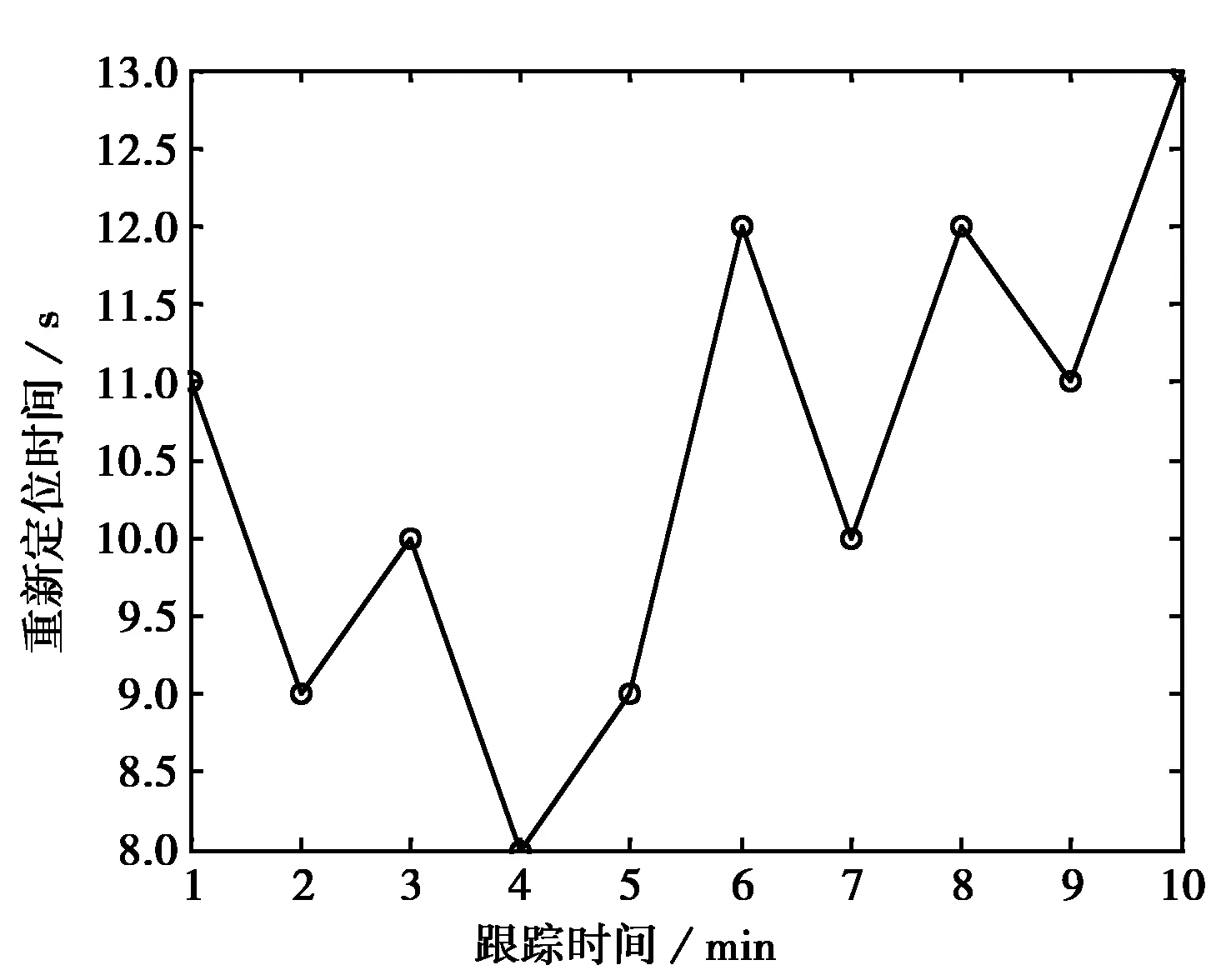
图8 长周期待机时间与定位时间的关系
从图中可以看出,对于短周期和长周期下的待机时间越长,则重新定位所花费的时间也越长,而待机的时间越长节省的功耗也就越多,因此节省的功耗越多,相应地要牺牲重新定位时间。
3.2 测试定位精度与功率控制的关系
同理,调整Trickle 的时间范围,得出定位精度与功耗控制的关系,结果如图9、10所示。
从图9、10中可以看出,待机的时间越长,定位精度将会有所下降。这说明功率控制虽然节省了功耗,但是相应地降低了接收机对信号的实时跟踪处理能力,导致定位精度下降。
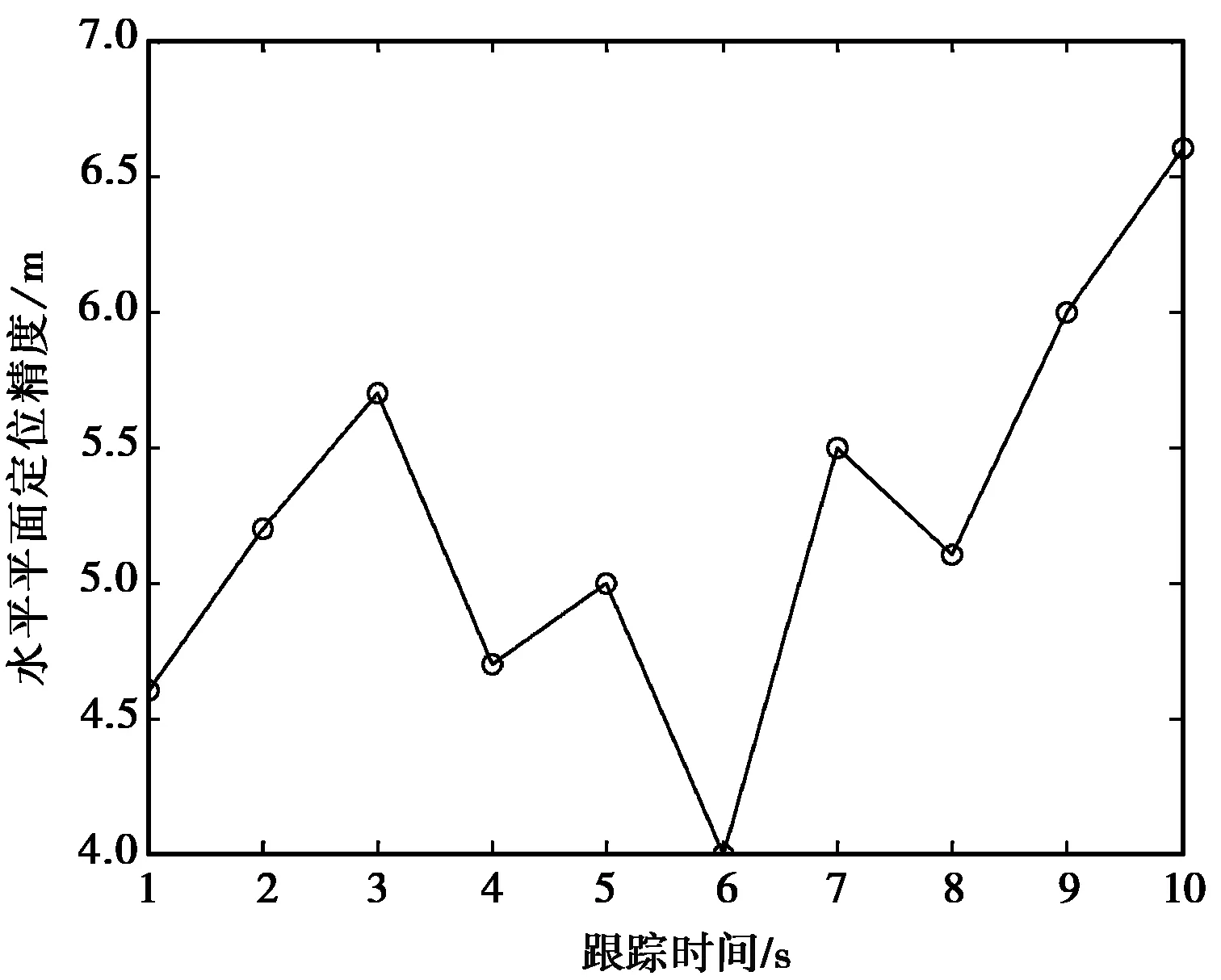
图9 短周期下功率控制与定位精度的关系

图10 长周期下功率控制与定位精度的关系
4 结束语
本文分析了导航接收机功率控制的时间参数的最优选取,得出了基本的结论是跟踪时间的最小长度为300 ms,同时从定位时间和定位精度两个方面分析了功率控制对接收机性能的影响。得出的基本结论是,功率节省的比例和性能之间是矛盾的,必须要折中最优选取。
[1]卢春鹏.动态电压和频率调节在降低功耗中的作用[J].单片机与嵌入式系统应用,2007(5):12-17.
[2]王 彪,王小鸽.动态电压和频率调整综述 [J].计算机应用研究,2009,35(13):160-162.
[3]CASTAGNETTI A, BELLEUDY C, BILAVARN S,etal. Power consumption modeling for DVFS exploitation. [C]//13th Euromicro Conference on Digital System Design: Architectures, Methods and Tools, 2010:579-586.
[4]LEE Y, ABTAHI R. SiRF application note power management considerations of SiRFstarIIIs [EB/OL].http://www.csr.com/products/26/sirfstariii-gsd3tw.
[5]GOPINATH S, HUNTINGFORD D, MCCARTHY T,etal.The SiRFstarIV advantage[M].Sirf,2009:9-11.
[6]CSR.SiRFatlasVI application processor advance information CSRS366-IBBO-R issue 1[EB/OL]. http://www.csr.com.
[7]U-BLOX. U-blox-7 receiver description including protocol specification V14[EB/OL]http://www.u-blox.com/zh/u-blox-7-technology.html.
[8]谢 钢.GPS原理与接收机设计[M].北京: 电子工业出版社, 2009:2-6.
猜你喜欢
资源节约与环保(2022年8期)2022-09-20
哈哈画报(2022年5期)2022-07-11
英语文摘(2022年5期)2022-06-05
风流一代·TOP青商(2020年6期)2020-06-19
大众文艺(2020年8期)2020-04-21
汽车与新动力(2019年5期)2019-11-07
课外生活(小学1-3年级)(2019年4期)2019-05-04
海峡姐妹(2017年7期)2017-07-31
中国新闻周刊(2016年46期)2016-12-26
发明与创新(2016年1期)2016-03-16
