
柔性滤波驱动机构的自适应动态面模糊控制
2014-08-26 06:32罗绍华王家序李俊阳石珍
哈尔滨工程大学学报 2014年7期
罗绍华,王家序,李俊阳,石珍
(1.重庆大学 机械传动国家重点实验室,重庆400044;2.湖南文理学院 机械工程学院,湖南 常德415000)
柔性滤波驱动机构[1-2]将具有可控界面弹性变形的滤波减速器组件、伺服电机与传感器集成一体,具有参数未知、非线性、强耦合和多变量等特征,其机械结构上的弹性体产生弹性预紧来补偿齿侧间隙与回差。柔性滤波驱动机构工作时,受到柔性变形、摩擦及传动误差等非线性因素的影响,这些因素将严重影响系统的控制精度、稳定性以及动态响应。国内外对考虑诸多非线性项的柔性滤波驱动机构的控制研究较少,因此,研究其先进的控制策略进而改善动静态性能具有重要的理论研究意义和工程应用价值。
LuGre模型[3-4]能全面描述摩擦力的动静态特性,但该模型参数会随着外界条件诸如机械磨损、温度和润滑条件等因素而变化。由于时变特性,其摩擦补偿控制已成为理论和应用研究的热点。有些学者应用神经网络[5]与模糊控制方法[6-7]辨识未知摩擦力。Seyfferth等[8]提出了柔性关节机器人的非线性谐波传动模型,然而模型中更多考虑磁滞的可塑性。MingChih等[9]针对时变不确定性柔性关节机器人提出鲁棒自适应控制器解决跟踪问题。Yong-ming等[10]研究了基于反步法的直流电机驱动单关节柔性机器人自适应模糊输出反馈控制问题,但未考虑非线性因素。刘金琨[11]针对单连杆柔性关节机器人控制系统设计了反步控制技术,但虚拟项多次微分产生所谓“系数膨胀”问题。动态面[12-13]设计过程中增加n-1个低通滤波器,克服反步法的不足。文献[14]将动态面与神经网络控制相结合,针对具有任意不确定性的严格反馈三角形SISO系统,提出了一种新的控制方法。本文针对柔性滤波驱动机构的控制问题,考虑非线性项的影响,设计了自适应动态面模糊控制器,验证了系统的有效性和优越性。
1 柔性滤波驱动机构
1.1 系统结构
如图1所示,柔性滤波驱动机构包括滤波减速器组件、伺服电机及传感器。与传统刚性齿轮相对,柔性滤波齿轮具有可控界面弹性变形,即采用多层材料复合设计齿轮本体,在设计的传动精度范围内在外齿轮本体镶嵌一层弹性材料,弹性体产生变形量进行弹性预紧,从而自动补偿齿侧间隙与回差,有效防止极端工况与特殊环境的影响而产生的非线性耦合振动,避免发生“卡涩”甚至“卡死”等可靠性问题,保证传动件在所设计的传动精度和承载能力范围内工作。
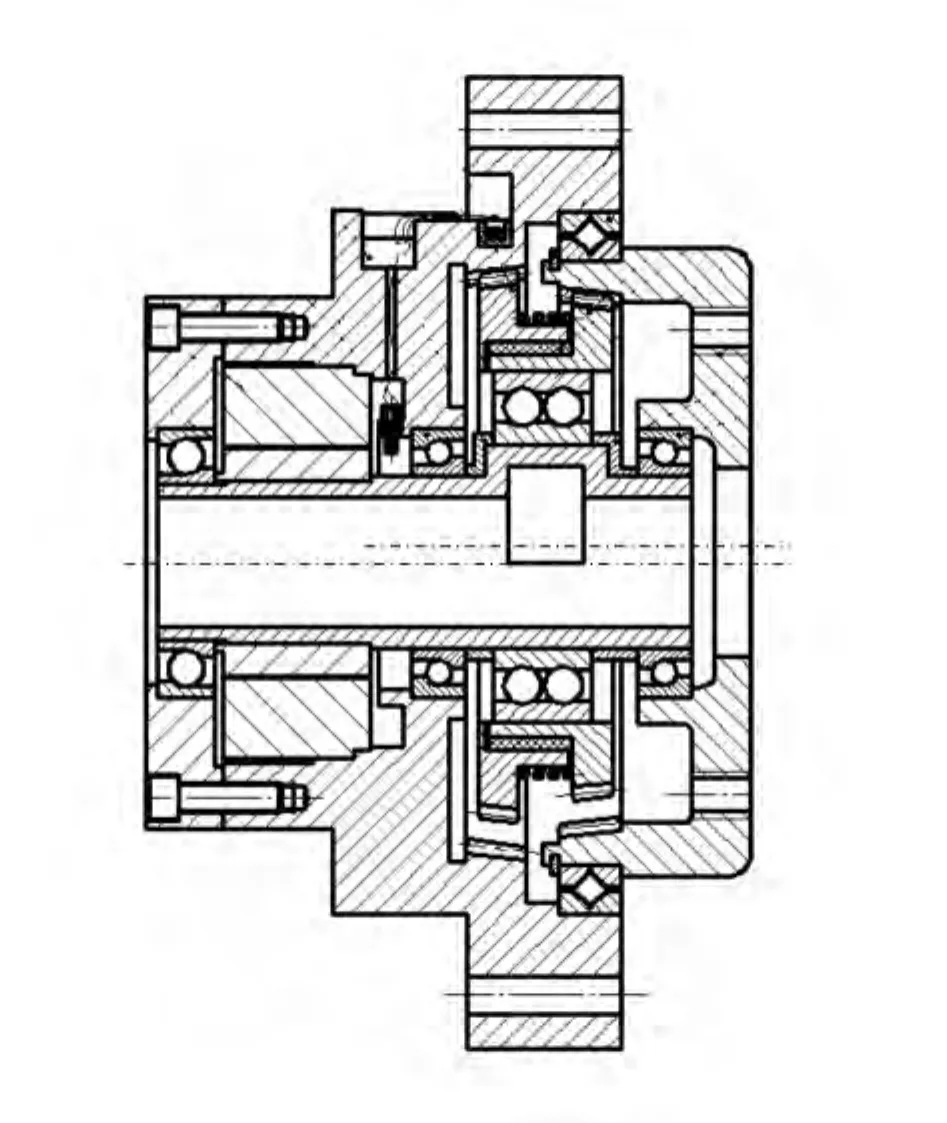
图1 柔性滤波驱动机构Fig.1 The flexible filter driving mechanism
1.2 非线性摩擦特性
LuGre全面定义Stribeck特性、摩擦滞迟现象、stick-slip运动、静摩擦力变化等各种摩擦特性。其模型表达式为

式中:σ0表示等效刚毛刚度,z表示刚毛变形量,σ1表示刚毛阻尼系数,σ2表示粘滞摩擦系数,表示接触面相对速度,φ()表示速度函数:

式中:Fc表示Coulomb摩擦力,Fs表示静摩擦力,表示Stribeck速度。
1.3 动力学模型
对于柔性滤波驱动机构,考虑柔性变形、摩擦及传动误差等非线性因素的影响,建立二阶非线性动力学模型如下
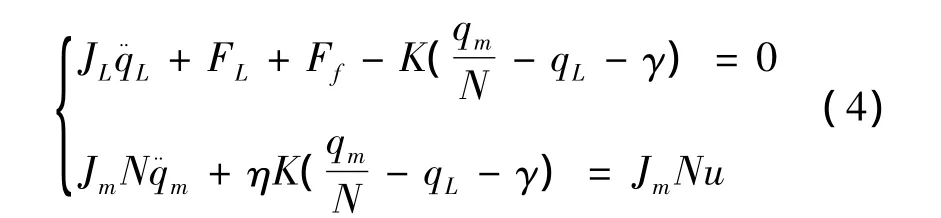
式中:Ff表示摩擦力矩,FL表示负载,K表示柔性刚度,JL、Jm表示驱动机构与电机转动惯量,N表示减速器组件减速比,γ表示传动误差,u表示电机输出力矩,η表示传动系统效率,qL、和分别表示驱动机构位移、速度和加速度,qm、和分别表示电机位移、角速度、角加速度。
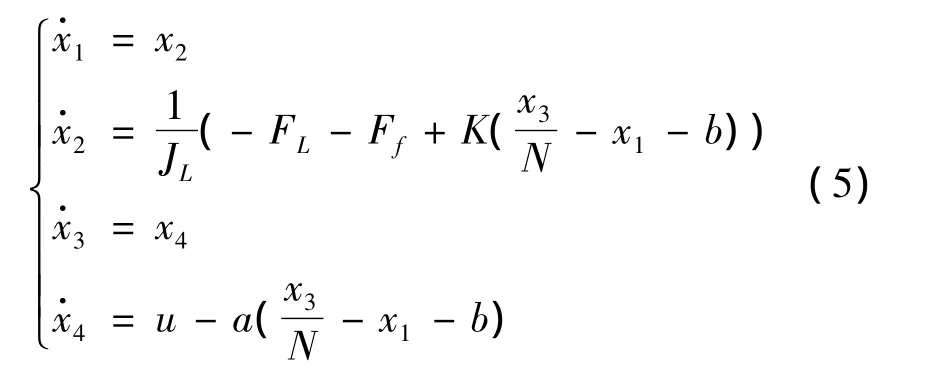
定义系统状态变量x1=qL、x2、x3=qm、x4以及a=ηK/JmN和b=γ,则动态方程重写如下
2 自适应动态面模糊控制器
2.1 模糊逻辑系统
模糊逻辑系统采用单点模糊化、乘积运算的模糊蕴涵关系、重心法解模糊和高斯函数的隶属函数时,可以表示为

式中:f〈x|θ〉:Ωx⊂Rn→R表示模糊系统的输出,表示未知参数向量,
选择模糊基函数:

式中:μFi(xi)表示高斯型的隶属函数。
对于紧集Ωy∈R中的连续非线性函数H(y),存在模糊逻辑系统f和ε>0,使得

式中:ε(y)表示模糊逼近器的逼近误差,并且满足
2.2 控制器设计
控制器设计分为以下4个步骤:
1)定义面函数e1=x1-xd,则其导数为

取稳定化函数为

式中:k1为控制增益。为了消除对微分产生的大量导数项,引入另一个状态变量x2f,并让稳定化函数通过一阶滤波器得到x2f,则

式中:τ2表示滤波器的时间常数。
2)定义面函数e2=x2-x2f,其动态方程为
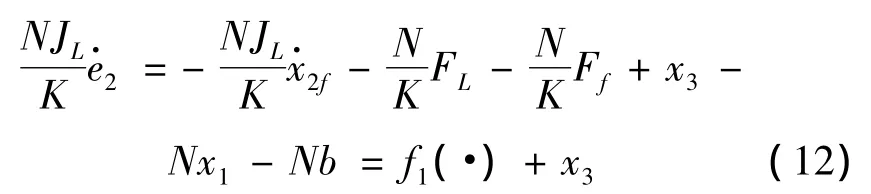

式中:δ1表示逼近误差,并满足不等式ε1>0且任意小。
依据步骤1)的思想,取稳定化函数为

式中:k2表示控制增益,是W1的估计值。让稳定化函数通过一阶滤波器得到x3f,则

式中:τ3表示滤波器的时间常数。
3)定义面函数e3=x3-x3f,则它的导数为

根据步骤1)的思想,取稳定化函数为

式中:k3表示控制增益。让稳定化函数通过一阶滤波器得到x4f,则

4)基于x4f定义面函数e4=x4-x4f,对其微分得

f2中既含有的导数,又含有未知量a、b和N,使得传统方法设计控制器非常困难。利用模糊逻辑系统在一个紧集上以任意精度逼近任意连续函数的优点,即存在2(z)使得:

式中:δ2表示逼近误差,并满足不等式ε2>0且任意小。
控制律设计为

式中:k4表示控制增益,是W2的估计值。uf=G(s)u一阶滤波器避开了代数循环问题,同时实际中执行器具有低频特性,即uf≈u。
设计自适应律如下
式中:n1、n2、Γ1和Γ2为正实数。
2.3 稳定性分析
滤波器误差:

边界层微分方程:
式中:
定义集合:
定理1 针对系统式(4),给定一个正数p,对所有满足初始条件V(0)≤p的情况,控制器式(21)和自适应律式(22)、(23)使得闭环系统信号半全局一致有界,跟踪误差收敛。
证明定义Lyapunov函数:
式中:tr(·)表示矩阵的迹。
对式(27)求导:
根据Young’s不等式,式(28)可得
将自适应率代入可得
由式(30)可得

若,则≤0。如果V(0)≤p,∀t≥0,系统误差会在紧集内一致最终有界,且不大于
将式(31)求微分方程可得
3 系统仿真实验分析
本节将验证柔性滤波驱动机构的自适应动态面模糊控制器的有效性和优越性。
选择以下隶属函数对系统输入进行模糊化:

LuGre摩擦模型的参数值为

控制器参数为

仿真实验结果如图2~5所示。图2、3是系统对于正弦输入的轨迹跟踪效果,可以看出,由于摩擦等非线性项的作用,PID位置跟踪存在“平顶”现象,速度跟踪存在“死区”现象,控制鲁棒性差,无法实现高精度控制。图4中所提方案较PID实现高品质的轨迹跟踪,其误差迅速收敛在有界小区域内,体现了控制的有效性和优越性。
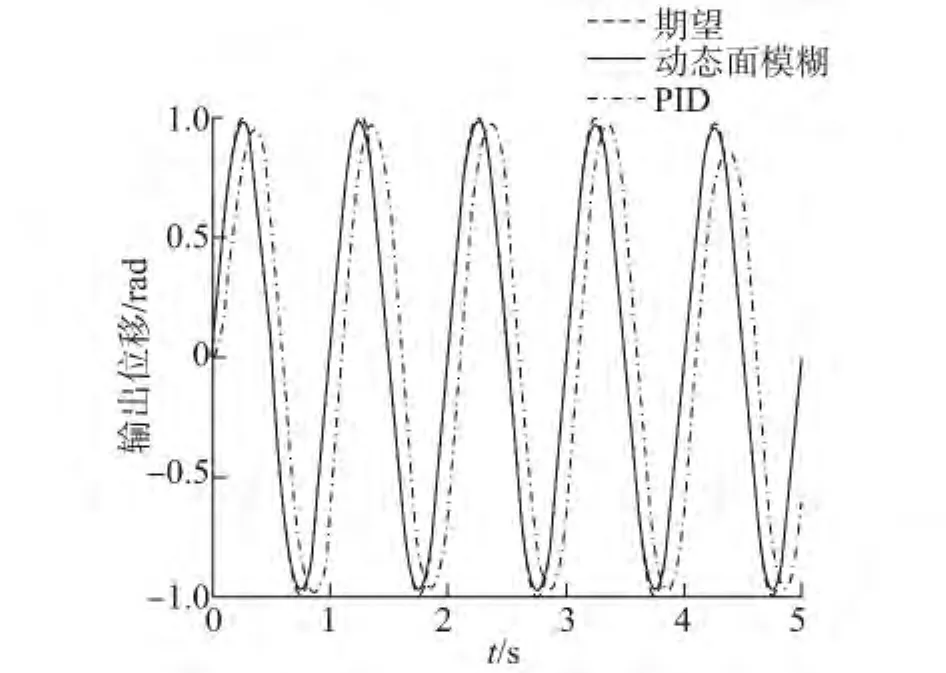
图2 正弦位置跟踪Fig.2 Sine position tracking
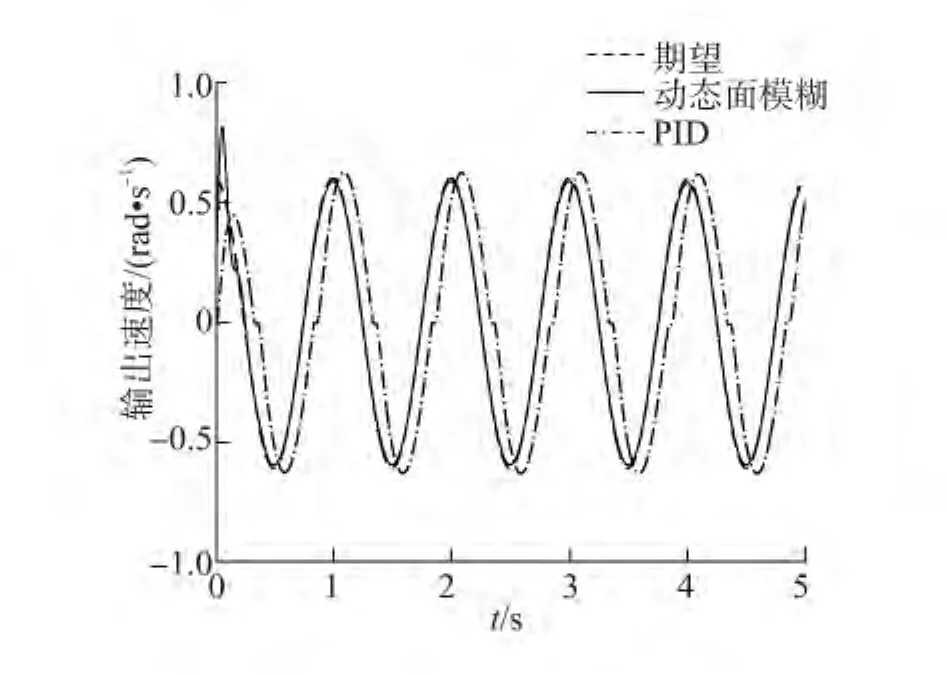
图3 正弦速度跟踪Fig.3 Sine velocity tracking
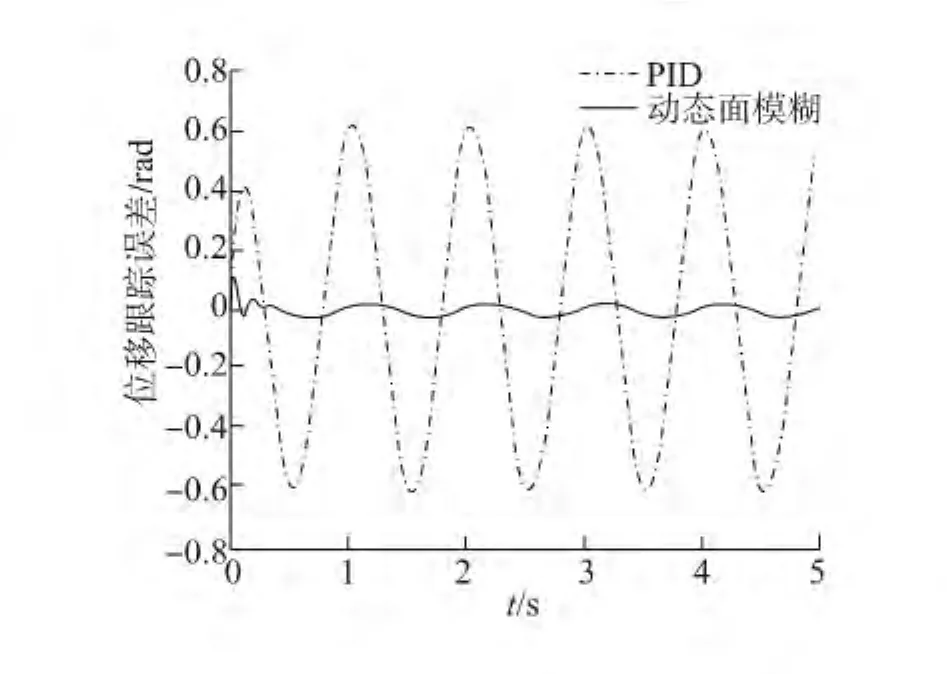
图4 位移跟踪误差Fig.4 Position tracking error
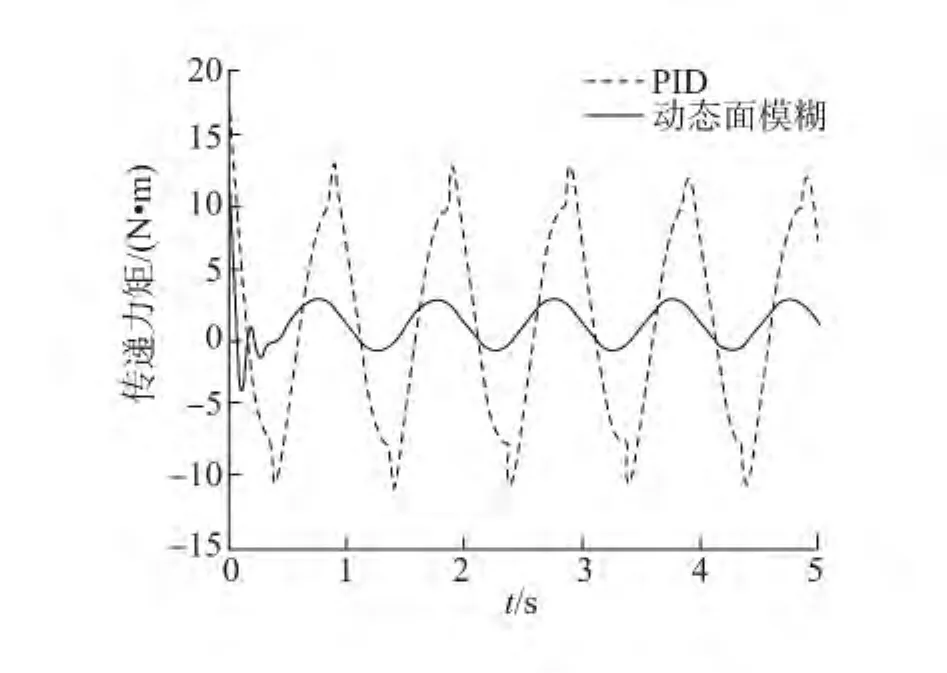
图5 传递力矩Fig.5 Transmitted torque
从图5状态响应曲线可知,为加快系统的收敛速度,虽然控制输入在初期需要的能量较大,但迅速趋于平衡状态,抖动减小,所提方案较PID更能有效地抑制参数未知、扰动等,实现控制连续平稳。
4 结论
针对柔性滤波驱动机构的控制问题,本文利用模糊逻辑的万能逼近特性,建立了柔性滤波驱动机构的自适应动态面模糊控制,并得出以下结论:
1)考虑非线性因素的影响,建立了合理的数学模型,所提控制器抑制了诸如摩擦等非线性项的影响,后续研究需要考虑体现温度影响的摩擦模型和热变形等影响因素。
2)将反步法控制的思想延伸到自适应动态面控制,克服相关文献中“计算膨胀”的问题,同时利用Lyapunov理论证明了所提控制器的稳定性。
3)与传统的PID对比,仿真实验结果表明了所提控制器具有很好的跟踪效果,使系统具有较强的鲁棒性,从而使自适应动态面模糊控制技术具有一定地工程应用价值。
[1]王家序,李俊阳,周广武,等.智能滤波驱动机构[P].中国:ZL20111005460.7,2012-10-31.
[2]王家序,秦德成,张林川,等.滤波减速器轮齿表面瞬态微观弹流润滑模型[J].四川大学学报:工程科学版,2013,45(1):202-207.WANG Jiaxu,QIN Decheng,ZHANG Linchuan,et al.Transient thermal micro-elastohydrodynamiclubrication model of filtering reducer[J].Journal of Sichuan University:Engineering Science Edition,2013,45(1):202-207.
[3]王威,李瑰贤,宋玉玲.汽车转弯高维非线性动力学特性研究[J].哈尔滨工程大学学报,2009,30(6):676-685.WANG Wei,LI Guixian,SONG Yuling.High-dimensional nonlinear vehicular turning dynamics[J].Journal of Harbin Engineering University,2009,30(6):676-685.
[4]DUAN H,LIU S,WANG D,et al.Design and realization of hybrid ACO-based PID and LuGre friction compensation controller for three degree-of-freedom high precision flight simulator[J].Simulation Modeling Practice and Theory,2009,17(6):1160-1169.
[5]HAN S,LEE K.Robust friction state observer and recurrent fuzzy neural network design for dynamic friction compensation with backstepping control[J].Mechatronics,2010,20(3):381-401.
[6]WANG Y,WANG D,CHAI T.Modeling and control compensation of nonlinear friction using adaptive fuzzy systems[J].Mechanical Systems and Signal Processing,2009,23(6):2445-2457.
[7]LIN J,CHEN C.Positioning and tracking of a linear motion stage with friction compensation by fuzzy logic approach[J].ISA Transactions,2007,46(3):327-342.
[8]SEYFFERTH W,MAGHZAL A,ANGELES J.Nonlinear modeling and parameter identification of harmonic drive robotic transmissions[C]//Proceedings-IEEE International Conference on Robotics and Automation.Nagoya,1995:3027-3032.
[9]CHIEN M,HUANG A.Adaptive control for flexible-joint electrically driven robot with time-varying uncertainties[J].IEEE Transactions on Industrial Electronics,2007,54(2):1032-1038.
[10]LI Y,TONG S,LI T.Adaptive fuzzy output feedback control for a single-link flexible robot manipulator driven DC motor via backstepping[J].Nonlinear Analysis:Real World Applications,2013,14(1):483-494.
[11]刘金琨.机器人控制系统的设计与Matlab仿真[M].北京:清华大学岀版社,2008:345-401.LIU Jinkun.Robotics control system design and simulation via Matlab[M].Beijing:Tsinghua University Press,2008:345-401.
[12]NA J,REN X,HERRMANN G,et al.Adaptive neural dynamic surface control for servo systems with unknown deadzone[J].Control Engineering Practice,2011,19(11):1328-1343.
[13]HAN S,LEE J.Adaptive dynamic surface control with sliding mode control and RWNN for robust positioning of a linear motion stage[J].Mechatronics,2012,22(2):222-238.
[14]WANG D,HUANG J.Neural network-based adaptive dynamic surface control for a class of uncertain nonlinear systems in strict-feedback form [J].IEEE Transactions on Neural Networks,2005,16(1):195-202.
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
石油沥青(2021年5期)2021-12-02
文化创新比较研究(2020年7期)2021-01-13
中学生数理化·中考版(2019年10期)2019-11-25
电子制作(2019年11期)2019-07-04
中学生数理化·八年级物理人教版(2019年3期)2019-04-25
电子制作(2018年16期)2018-09-26
中学生数理化·中考版(2017年10期)2017-04-23
系统工程与电子技术(2016年7期)2016-08-21
