数字PID调节器的分析
2014-08-31 09:48严林波
山东工业技术 2014年21期
严林波
(1.江西科技师范大学,南昌 330013;2.南昌理工学院,南昌 330044)
1 PID算法
PID算法既为比例环节、积分环节和微分环节的组合,作为计算机控制系统中一类成熟的算法,被广为使用。适用于对对被控对象模型了解不清楚的场合。PID算法的原理是通过比例、积分和微分关系对对输入该系统的偏差值的反复调整,最终得到满足控制要求的输出信号。
2 比例积分调节器
2.1 比例积分调节器
比例积分调节器:若将比例和积分两种作用结合起来,就构成PI调节器。

式中:y 是调节器输出;KP 是比例系数;e(t)是调节器输入偏差;TI是积分时间常量。
2.2 特征曲线
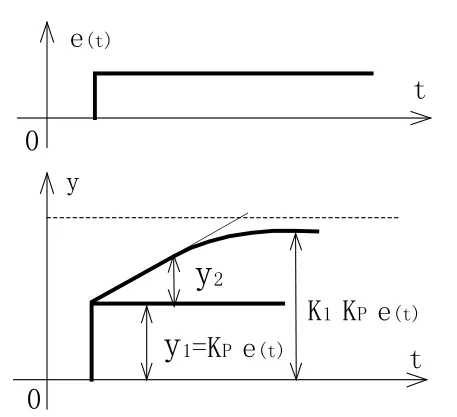
图1 比例微分调节器的特征曲线
首先比例调节作用输出Y1;随后积分作用于同一方向,在Y1的基础上使输出值不断增大;最后PI调节器的输出值趋于稳定值[KI*KP*e(t)]。PI调节器集合了比例调节器和积分调节器:后者可以消除由于前级的比例环节带来的静差的问题,于此同时,积分环节存在的调节时间慢的问题又可以通过前级的比例环节进行调整,可以说是互为补充。但是当控制对象具有较大的惯性时,无法得到很好的调节品质。
3 比例微分调节器
3.1 比例微分调节器
比例微分调节器是将比例调节器和微分调节器综合起来,构成了KD调节器。

式中:y是调节器输出;KP 是比例系数;e(t)是调节器输入偏差;TD是微分时间常量。
3.2 特征曲线
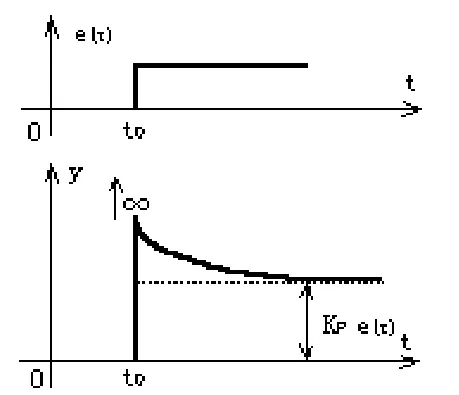
图2 比例微分调节器特征曲线
当偏差刚出现瞬间时PD调节器输出一个很大的阶跃信号;然后PD调节器输出随着微分作用的逐渐消失按指数下降,变成一个纯比例环节。因此比例微分控制具备了比例控制器的快速反映偏差和微分控制器的预测误差变化趋势的作用,但是不能很好的消除系统的静差。
4 比例积分微分调节器(PID调节器)
4.1 PID调节器
PID调节器把比例、积分、微分三种作用组合起来,形成PID调节器可以进一步改善PI、PD调节器的调节品质。

式中:y是调节器输出;KP 是比例系数;TI是积分时间常数;TD是微分时间常量;e(t)是调节器输入偏差。
4.2 特征曲线
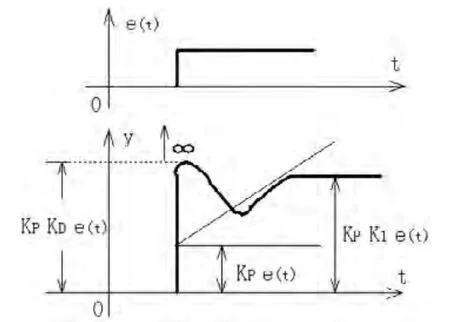
图3 PID调节器的特征曲线
PID控制器中三个环节的作用:
(1)比例环节的作用:能够是的系统偏差被立即的反映出来,同时具有调节时间短,反映迅速等特点,可以有效的减少偏差;但是随着比例系数的变大,将会导致系统的不稳定,同时该环节无法消除稳态误差。
(2)积分环节的作用:该环节具有积累系统偏差的作用,通过对系统偏差的积累,使得控制量会不断增大,达到最终消除偏差的目的。缺点是当积分的作用过强时,会导致系统超调量的过大,从而或导致系统产生振荡。
(3)微分环节的作用:微分环节和积分相反,该环节反而对超调进行减少的作用,从而避免系统发生振荡,让系统处于稳定的状态。同时具备提高系统动态性能的优点。但微分作用过大,会使系统出现不稳定。
5 PID算法的离散化
在计算机控制系统中,首先把过程参数进行采样;然后进过量化后转为数字信号;数字信号往往被送达数字化的控制系统如单片机系统等,在系统内部通过编制相应的程序,进行控制算法的实现,从而实现对数字信号的运算处理。最后通过数模转换器实现数字信号到模拟信号的恢复,处理好的信号可以通过执行机构去实现对生产的控制。因此计算机控制是一种采样控制,在计算机控制系统中,必须把PID算法进行离散化处理。
[1]张燕红编著.计算机控制技术[M].南京:东南大学出版社,2014.
猜你喜欢
黑龙江大学自然科学学报(2022年1期)2022-03-29
现代电子技术(2021年24期)2021-12-27
时代农机(2020年3期)2020-12-23
电子技术与软件工程(2020年23期)2020-03-15
宇航计测技术(2018年3期)2018-09-08
北京航空航天大学学报(2017年10期)2017-04-20
成才之路(2016年27期)2016-09-30
考试周刊(2016年44期)2016-06-21
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
汽车与新动力(2015年1期)2015-02-27