基于软件延时补偿的高速磁悬浮电机转子低频颤振抑制研究
2014-09-06 06:22韩邦成王英广
振动与冲击 2014年10期
刘 健,韩邦成,王英广
(1. 北京航空航天大学 惯性技术重点实验室,北京 100191;2. 新型惯性仪表与导航系统技术国防重点学科实验室,北京 100191)
磁轴承(Magnetic Bearing)因具有无机械磨损、无需润滑、电磁力可控等优点[1]被研究、应用,磁悬浮电机即为应用范例。随磁悬浮技术的日益成熟,磁悬浮电机广泛应用于如磁悬浮分子泵、空气压缩机等民用产品中。磁悬浮分子泵及空气压缩机等产品性能要求主要动力部件即磁悬浮电机须在高转速下才能提升产品性能指标。但随转速的提高,磁悬浮电机转子高速时失稳逐渐凸显。因此,提高其稳定性,确保磁悬浮电机高速时稳定运转为须解决的重要问题。磁悬浮电机转子高速时失稳的主要表征为转速同频分量增大及低频颤振增加,前者可利用动平衡技术解决。确保磁悬浮转子具有较好动平衡即高速时转速同频分量较小[2-3]情况下,低频颤振为关键因素,抑制磁悬浮转子高速时的低频颤振,可有效提高稳定性。
对扁平转子因陀螺效应引起的低频颤振,磁悬浮陀螺与磁悬浮飞轮已有研究[4-5],并提出有效解决方法;磁悬浮电机转子细长,陀螺效应影响可忽略,但磁悬浮电机转子高速时低频颤振仍剧烈,目前对其研究较少。而用先进控制算法提高磁悬浮转子高速的稳定性[6-7],抑制低频颤振,且先进控制算法运算复杂,加之控制器性能限制,此方法不但未能有效抑制低频颤振,反会使系统相位滞后更大,加剧不稳定。Jugo等[8-9]利用频域模型对磁悬浮转子高速稳定性进行研究,认为磁轴承非线性力造成磁悬浮转子高速时低频颤振的增大,进而导致系统失稳。但该研究仅限于理论分析,未提出有效解决方案。
本文通过100 kW高速磁悬浮电机分析、实验,证明较大控制系统计算延时可致功放系统相位滞后加剧,高频输出电流跟踪能力减弱,造成磁悬浮转子高速时低频颤振增大。该电机以24 000 r/min转速运行时实验结果表明,消除控制系统计算延时可有效抑制磁悬浮转子高速时低频颤振、提高稳定性。
1 控制系统计算延时影响分析
1.1 控制系统计算延时建模
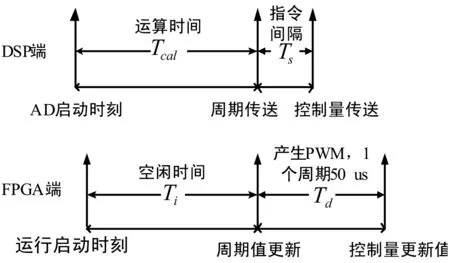
图1 控制系统计算延时模型
图1为控制系统内部DSP端与FPGA端对应关系,磁轴承控制系统中DSP计算的控制量时刻与FPGA更新控制量时刻不同步造成控制系统计算延时。DSP由AD采样始,至PID算法计算出控制量,所需时间Tcal称运算时间[10],引入延时
Gcal(s)=e-sTcal
(1)
在DSP的PID运算中,亦运行FPGA,但因第一周期FPGA内周期值与控制量值均为0,故FPGA端处于空闲状态,空闲时间为Ti,引入延时:
Gi(s)=e-sTi
(2)
DSP的AD运算与FPGA空闲时段同时进行,因FPGA运行时刻滞后于DSP的AD启动时刻,对整个控制系统而言,此时段引入的延时与运算延时相同,均为Tcal。DSP中PID运算完成后,启动周期值与控制量传送,周期值早于控制量值一个指令传送,两者传送时间间隔为Ts,引入延时为
Gs(s)=e-sTs
(3)
因此,理论上控制系统总延时时间为Tcal+Ts。 引入总延时:
Gdel(s)=Gcal(s)Gs(s)
(4)
实际中FPGA接收到DSP传送的周期值后即开始PWM生成周期,Ts时段后接收的控制量值并未更新当前时刻,而等本次周期结束后下周期开始前更新。控制量更新时刻滞后于控制量计算时刻一个PWM周期。设PWM周期时间为Td,则此段延时时间为
Gd(s)=e-sTd
(5)
实际运行时控制系统总延时时间为Tcal+Td。总控制系统延时为
Gdel(s)=Gcal(s)Gd(s)
(6)
由于控制量更新时刻滞后计算时刻,实际控制系统延时较理论延时多Td-Ts。相对50 μs的PWM周期时间,指令间隔时间Ts可忽略不计,故控制系统实际运行时引入的计算延时较理论值多50 μs,此延时作用于功放环节会使功放电流高速时相位滞后加剧,功放电流高频跟踪能力减弱,磁悬浮转子高速时低频颤振剧烈。
1.2 考虑计算延时的功放系统建模
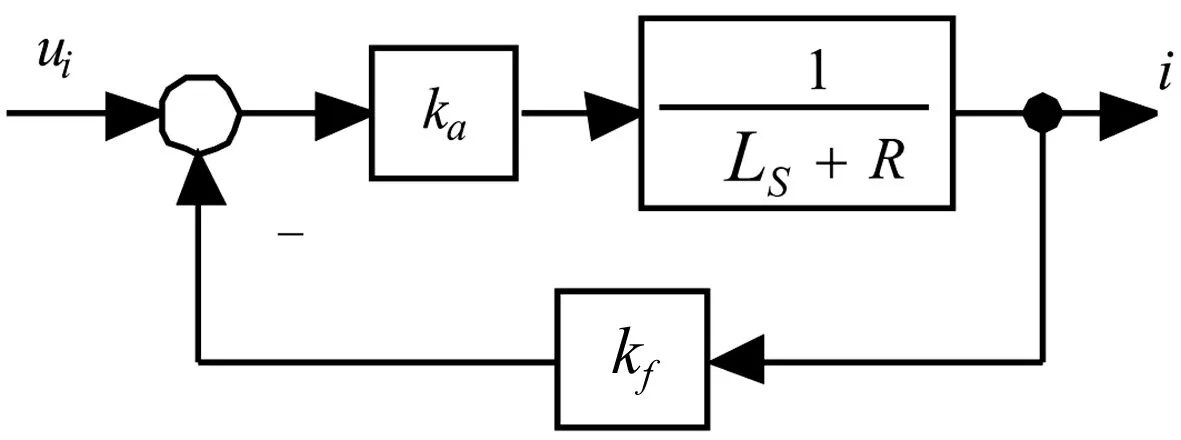
图2 功放系统线性模型
磁轴承功放参数输入由磁轴承控制器给出,输出则为流过磁轴承线圈的电流,一般等效为线性模型,见图2。由该模型可获得闭环传递函数为
(7)
式中:L,R分别为磁轴承线圈电感、电阻;ka,kf分别为功放开环放大倍数、电流反馈系数。
令s=jω,则式(7)可写为
(8)
由式(8),功放相位滞后φamp为
(9)
实际运行时控制系统存在计算延时,其计算延时作用于功放环节,致实际功放模型与理论模型稍有差别。考虑控制系统计算延时影响的功放环节模型见图3。
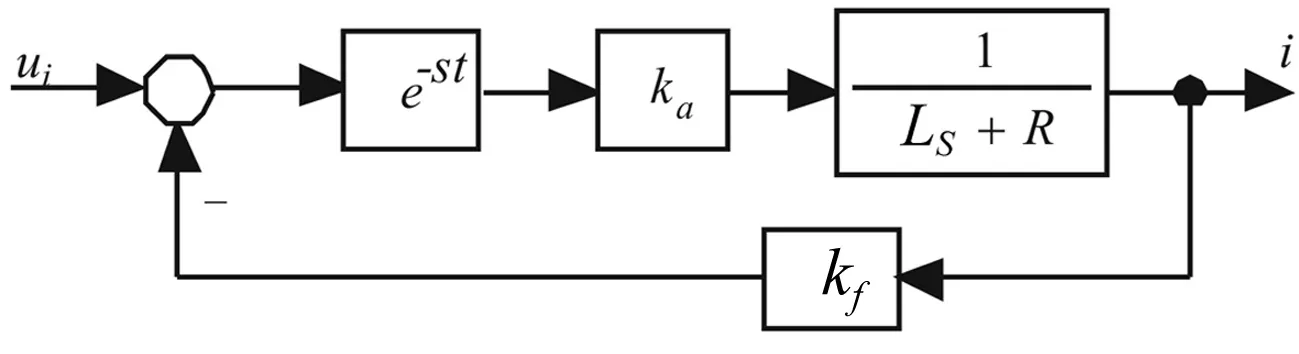
图3 考虑计算延时的功放系统模型
其传递函数为
(10)
式中:t为由控制系统计算延时引入的延时时间常数。
将est泰勒级数展开,取前两项并化简得:
(11)
令s=jω,代入式(11)得:
(12)
由式(12),考虑控制系统计算延时的功放环节相角滞后为
(13)
(14)
将式(14)进一步化简为
(15)
t=0时,φdel=-arctanA=φamp;t>0时,式(15)可进一步化简为
(16)
因R/L为常数,且Aω∝ω2,故控制系统计算延时的存在会给功放环节引入附加的相位滞后,且随ω的增大而增大,高速时表现较显著。而φdel随控制系统计算延时t的增大而增大。因此,控制系统计算延时的存在会使功放环节相位滞后加剧,导致功放系统高频时输出电流的跟踪能力减弱、磁悬浮转子低频颤振剧烈。因此,磁轴承功放系统高速时输出磁力非线性可致磁悬浮转子系统低频特性不稳定,易造成磁悬浮转子高速时低频颤振[12]。而功放系统输出磁力非线性主要表征为功放系统高频时饱和,输出电流跟踪能力减弱,须采取有效措施减小甚至消除控制系统计算延时。
2 控制系统计算延时消除方法
针对现用磁轴承系统,电流采样通过电流互感器而非采样电阻,因此不能采用不平衡电阻补偿网络等硬件方式进行延时补偿。本文提出的基于软件方式的控制系统计算延时消除方法简单易行、效果明显,具有较强实用价值。
常用控制系统中,AD采样频率为6.6667 kHz,FPGA产生的PWM频率为20 kHz。由PWM与AD频率关系看出,PWM每隔3个周期接收到一个DSP计算的控制量。FPGA在每个周期完成后均会进行一次控制量更新(PWM上升沿更新)。AD采样与PWM间生成关系见图4。由图4(a)看出,系统上电后,DSP运行并触发FPGA启动,初始FPGA中PWM周期值及占空比值均为0,处于空闲状态。而图4(b)中,AD第一次采样到FPGA第一次更新周期值时间约9 μs,而自AD采样至算出控制量更新值需11 μs,故只能等下周期才能更新该周期控制量值,造成控制量更新时刻晚控制量计算时刻一个PWM周期,即50 μs。该系统计算延时高速时会造成磁悬浮系统相位严重滞后(600 Hz,50 μs延时相位滞后接近10°)。
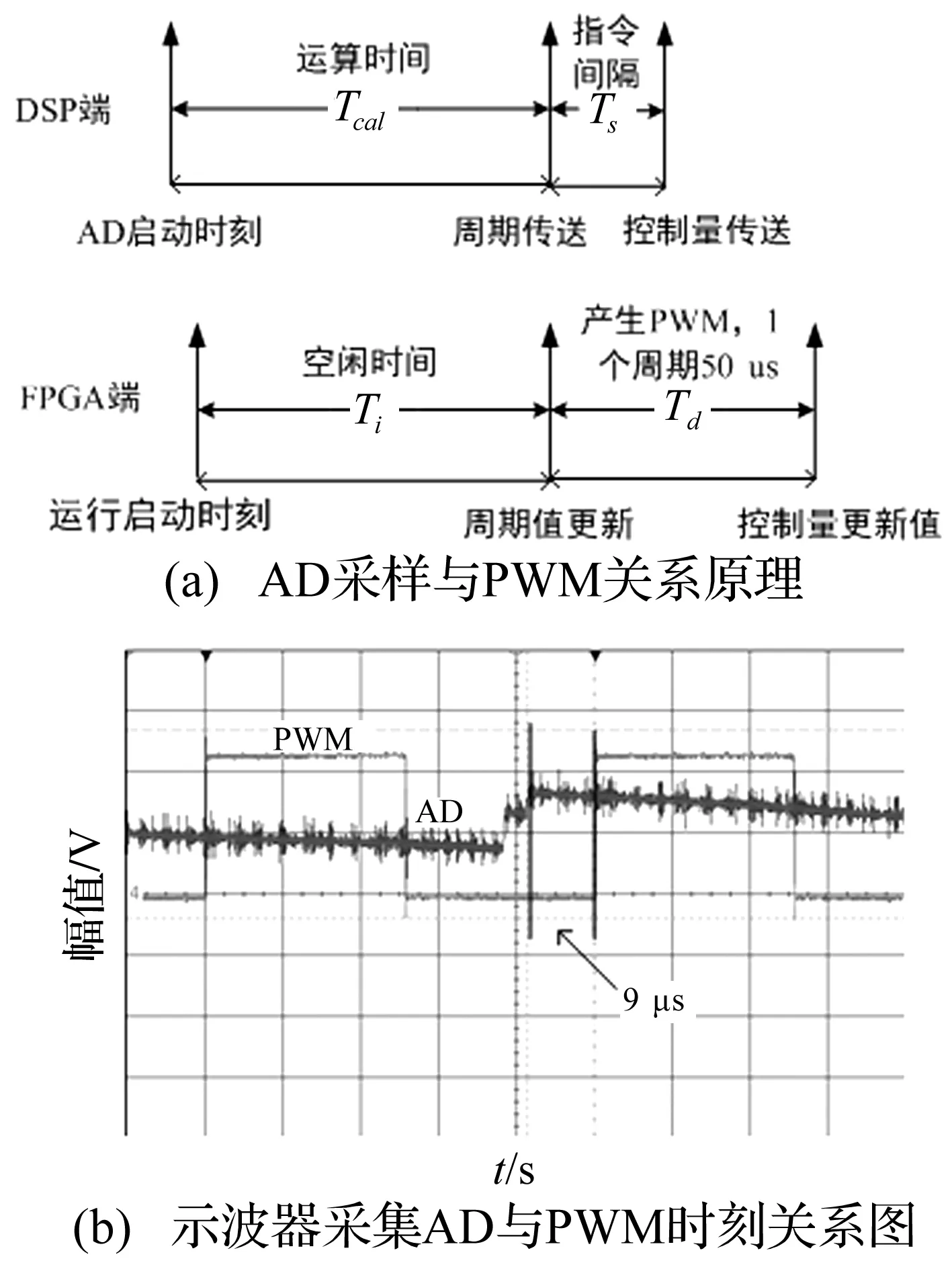
图4 AD采样时刻与PWM关系原理及示波器采集
为消除系统计算延时,采用的解决方案见图5。由图5(a)看出,此方案利用FPGA并行性,在FPGA启动时刻与控制量接收时刻间插入延时补偿可达到最小化控制系统计算延时目的。加入延时补偿时间为Tcal+Ts,运算时间Tcal与指令间隔Ts可在DSP端精确获得。为保证实用性,加入的延时补偿时间亦可略大于Tcal+Ts。虽仍引入计算延时,但延时时间较短(小于1 μs),可使计算延时最小化。加入软件延时补偿算法后,系统运行过程为:系统上电后DSP启动运行,在第一个AD采样启动后通过外围总线向FPGA发送运行指令及延时时间量,当延时达到要求值时,FPGA开始生成PWM信号。此段软件延时补偿的加入,能保证DSP算出的控制量更新值及时更新,使控制系统计算时间延时得以减小甚至消除,达到系统运行最优状态。由于AD采样周期为PWM周期整数倍,此延时补偿程序只需在第一个PWM发生时执行,便可保证其正确性。加入延时补偿算法后,AD采样沿与PWM产生沿间时间间隔约12 μs,略大于自AD采样至算出控制量时间(约11 μs),见图5(b)。

图5 系统延时补偿原理及示波器采集
通过补偿算法,消除控制系统计算延时,不仅能补偿功放系统高频时相位滞后、提高高频时功放输出电流的跟踪能力、抑制磁悬浮转子高速时低频颤振,且能加大系统高频时幅值衰减、提高系统高频时的稳定域度及磁悬浮转子高速时的稳定性。
3 实验验证
为验证延时补偿算法补偿效果,以100 kW电机为实验平台,进行扫频及升速实验验证,系统参数见表1,径向控制参数见表2。
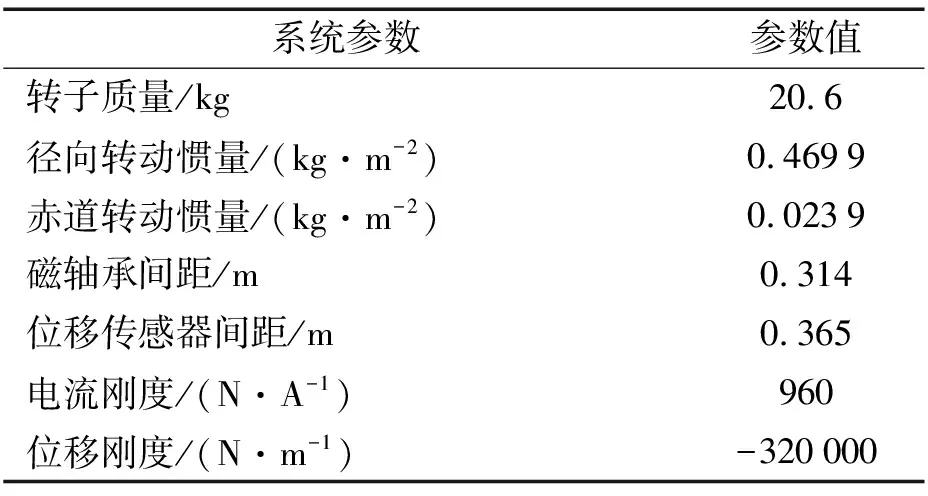
表1 100 kW磁悬浮电机高速转子系统参数
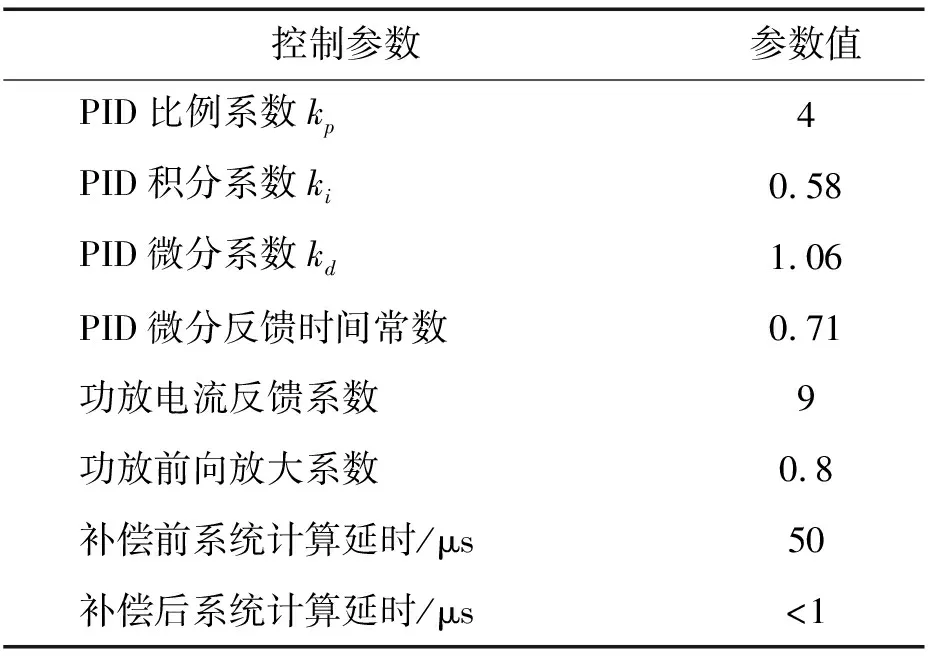
表2 100 kW磁悬浮电机径向控制参数
3.1 延时补偿扫频实验验证
补偿前后磁悬浮转子闭环系统幅频、相频对比见图6。由图6(a)看出,加入系统计算延时补偿算法后,闭环系统相位得到较好补偿,相位滞后得到明显改善。对系统相位补偿效果在低、高频均有体现,低频60 Hz补偿相位7°,低频80 Hz补偿相位12°,中频300 Hz补偿相位11°,600 Hz补偿相位15°;高频1000 Hz补偿相位23°,相位补偿效果较好。由图6(b)看出,系统延时补偿后,闭环系统低、高频时幅值增益亦明显衰减,60 Hz时幅值增益衰减3 dB,800 Hz时幅值增益衰减2 dB。表明计算延时补偿后磁悬浮转子低频颤振减小,高频稳定性提高。
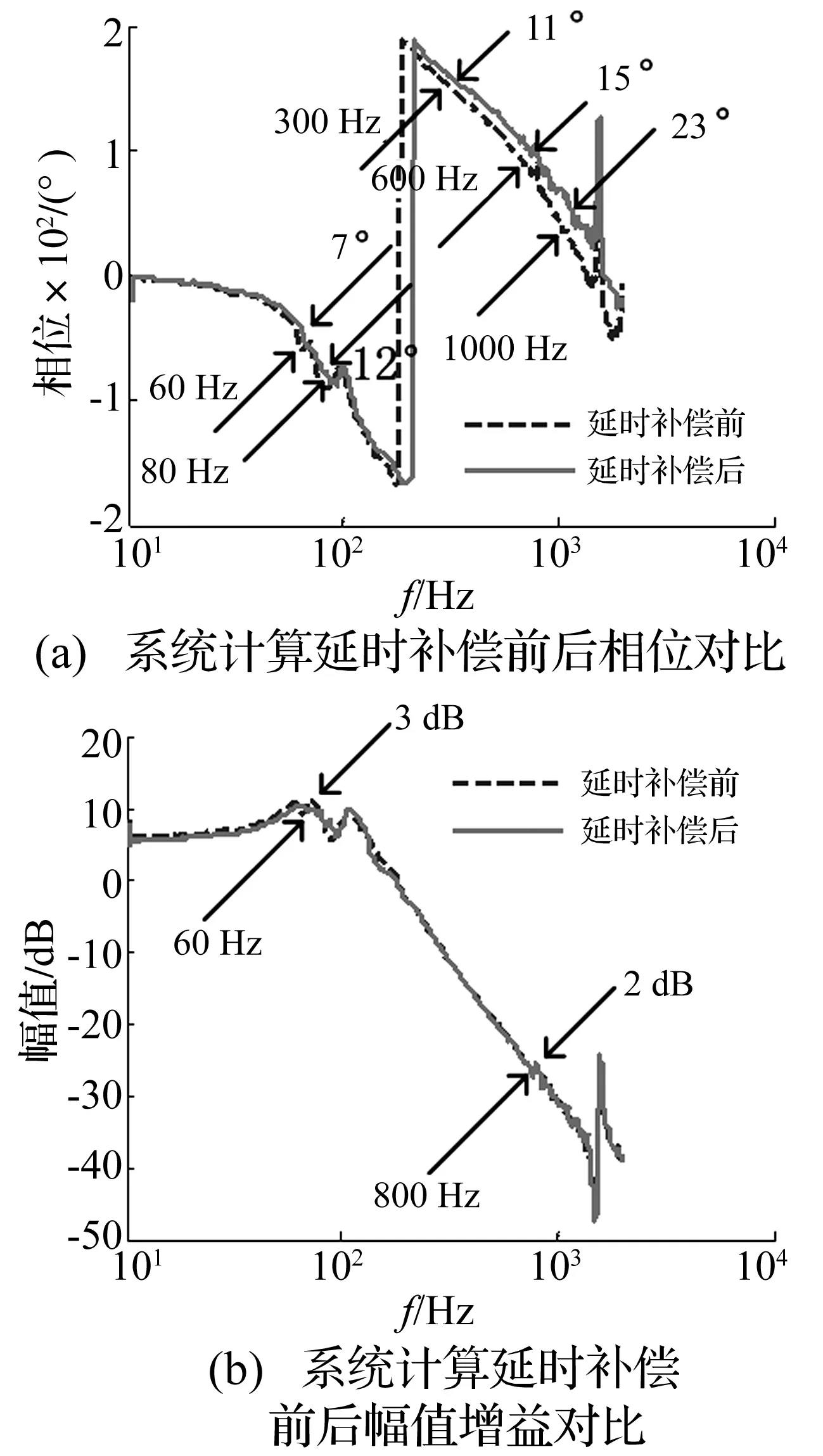
图6 系统计算延时补偿前后相频、幅频图
由图6及数据看出,延时补偿算法对闭环系统作用效果较好,既可抑制磁悬浮转子低频颤振,又能提高系统高速时的稳定性。
3.2 延时补偿升速实验验证
为验证延时补偿算法对磁悬浮电机转子低频颤振的抑制作用,以表1中100 kW电机为实验平台、表2控制参数为实验条件,进行补偿前后升速对比实验,见图7。
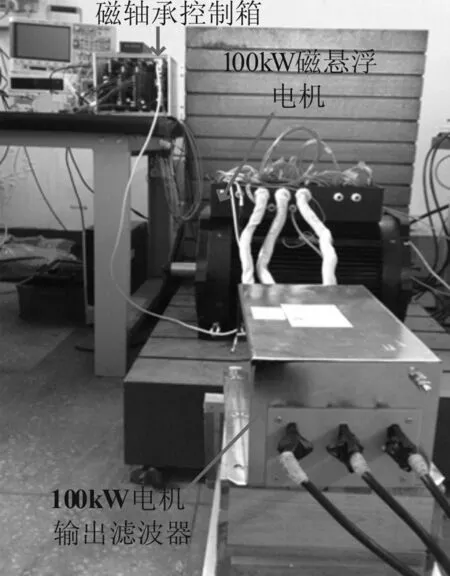
图7 100 kW电机实验平台
在表2控制参数调控下,100 kW电机稳速升至24 000 r/min,补偿前后转子低频增益及位移跳动量对比见图8。
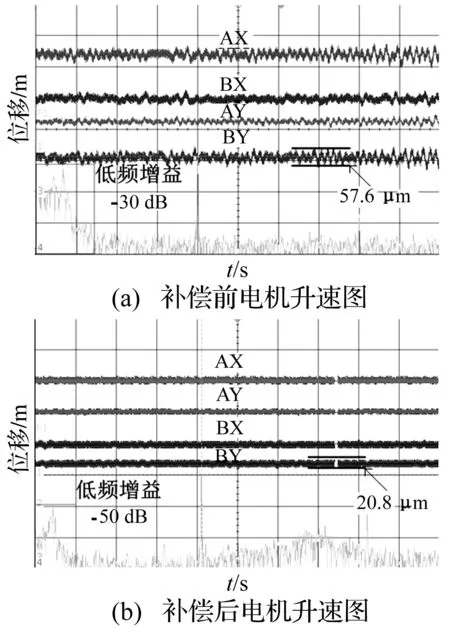
图8 磁悬浮电机补偿前后升速对比
由图8看出,磁悬浮电机补偿前升速至24 000 r/min时低频增益为-30 dB,补偿后为-50 dB;径向BY通道位移跳动量补偿前57.6 μm,补偿后20.8 μm,跳动量减小36.8 μm,控制精度提高63.89%。实验结果表明,控制系统计算延时消除能较好抑制磁悬浮电机转子的低频颤振、减小磁悬浮电机转子高速时的跳动量及控制精度。
4 结 论
(1) 本文针对磁悬浮转子在高速时低频颤振加剧、稳定性变差等问题,提出的通过消除控制系统延时补偿功放系统相位滞后、提高功放系统高频时电流跟踪能力方法,能抑制磁悬浮转子高速时低频颤振、提高磁悬浮转子高频稳定性。
(2) 实验结果表明,加入延时补偿后,100 kW磁悬浮电机转子在24 000 r/min时低频增益减小20 dB,转子跳动量减小36.8 μm,控制精度提高63.89%。充分说明控制系统计算延时方法的有效性。
[1]施韦策 G,布鲁勒 H,特拉克斯勒 A,著.虞烈, 袁崇军,译.主动磁轴承基础、性能及应用[M]. 北京: 新时代出版社, 1997.
[2]黄立权,王维民,苏奕儒,等.基于电磁自愈力的转子快速自动平衡实验[J]. 振动与冲击, 2011,30(1):208-212.
HUANG Li-quan, WANG Wei-min, SU yi-ru, et al. Rotor automatical balancing method and test based on electromagnetic self-recovery force[J]. Journal of Vibration and Shock, 2011, 30(1): 208-212.
[3]邓旺群, 王桢, 舒斯荣,等. 涡轴发动机细长柔性转子动力特性及高速动平衡技术研究[J], 振动与冲击,2012, 31(7): 162-165.
DENG Wang-qun, WANG Zhen, SHU Si-rong, et al. Dynamic characteristics and high speed dynamic balance technique for a power turbine rotor of a turbo-shaft engine[J]. Journal of Vibration and Shock, 2012, 31(7): 162-165.
[4]郑世强, 房建成. MSCMG磁轴承μ综合控制方法与实验研究[J]. 仪器仪表学报, 2010, 31(6): 1375-1380.
ZHENG Shi-qiang, FANG Jian-cheng. Experimental study on μ synthesis control for magnetic bearings of MSCMG [J]. Chinese Journal of Scientific Instrument, 2010, 31(6): 1375-1380.
[5]Fang Jian-cheng,Zheng Shi-qiang. AMB vibration control for structural resonance of double-gimbal control moment gyro with high-speed magnetically suspended rotor[J]. IEEE-Asme Transactions on Mechatronics,2013,18(1): 32-43.
[6]赵雪山.永磁偏置径向轴向磁轴承H∞控制系统的研究[D].南京:南京航空航天大学,2004.
[7]Alexander S, Rafal J, Katja H. gain-scheduled and linear parameter-varying approaches in control of active magnetic bearings[C].Proceedings of the 12thInternational Symposium on Magnetic Bearings, 2010: 350-360.
[8]Jugo J, Lizarrage I, Arredondo I. Nonlinear modeling and analysis of active magnetic bearing systems in the harmonic domain: a case study[J]. IET Control Theory Appl, 2008,2(1): 61-71.
[9]Jugo J, Lizarrage I, Arredondo I. Nonlinear analysis of an AMB system using harmonic domain LTV models[C]. IEEE Int. Conf. Control Applications, Munich, Germany,2006.
[10]Ren Yuan, Fang Jian-cheng. Current sensing resistor design to include current derivative in PWM H-bridge unipolar switching power amplifiers for magnetic bearings[J]. IEEE Transactions on Industrial Electronics,2012,59(12): 4590-4600.
[11]Fan Ya-hong, Fang Jian-cheng, Liu Gang. Analysis and design of magnetic bearings controller for a high speed momentum wheel[A]. Proceedings of the 8th International Symposium on Magnetic Suspension Technology[C].Dresden, Germany, 2005.
[12]Arredondo I, Jugo J, Etxebarria V. Modeling of a flexible rotor maglev system[C]. ACC American Control Conf., Minneapolis, USA,2006.
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-23
环球人物(2022年4期)2022-02-22
小资CHIC!ELEGANCE(2021年32期)2021-09-18
小学科学(学生版)(2021年4期)2021-07-23
自动化仪表(2020年10期)2020-11-13
电子制作(2019年14期)2019-08-20
军事文摘(2017年16期)2018-01-19
中国科技教育(2016年12期)2017-08-11
对联(2015年22期)2015-06-11
小学阅读指南·高年级版(2014年2期)2014-05-27