
基于最小二乘支持向量机的网络控制系统建模
2014-09-06 10:31秦贵和董劲男
吉林大学学报(理学版) 2014年6期
孙 丹, 秦贵和, 董劲男,, 陈 虹
(1.吉林大学 计算机科学与技术学院, 长春 130012; 2.吉林大学 通信工程学院, 长春 130012)
基于最小二乘支持向量机的网络控制系统建模
孙 丹1, 秦贵和1, 董劲男1,2, 陈 虹2
(1.吉林大学 计算机科学与技术学院, 长春 130012; 2.吉林大学 通信工程学院, 长春 130012)
针对网络控制系统实时信号的传输问题, 提出一种采用最小二乘支持向量机理论预测和补偿非理想条件下网络传输导致的不良影响, 建立一个较通用网络控制系统模型的方法, 并对所提出模型的正确性和可应用性进行验证.仿真结果表明, 基于最小二乘支持向量机预测模型能在一定程度上提高网络控制系统的动态性和稳定性, 弥补了周期性传输采样信号占用大量网络带宽和不必要网络通信的缺陷.
网络控制系统; 最小二乘支持向量机; 预测补偿; 建模
随着计算机、通信和控制技术的发展, 使网络控制系统(NCS)的应用受到了广泛关注.它以通信网络作为控制信号传输和被控对象输出的载体, 将分布在不同地理位置的各种智能节点(传感器、执行器和控制器)连接成闭合实时反馈控制系统, 与传统点对点控制系统结构相比, 具有费用低、可靠性高并易于实现通信资源共享等特点.由于网络通信的引入, 在有限带宽资源下分时传输不同信息源的数据, 因此传输过程中不可避免的存在数据碰撞, 导致延时、数据包丢失及网络拥塞等问题.这些问题的存在降低了控制系统性能, 甚至可能导致控制系统振荡加剧, 使对系统的分析和设计变得更复杂[1-4].
目前, 用于规避网络引入延时和数据包丢失的方法主要有两种, 这两种方法可并行且互补: 1) 从网络通信的角度, 选择可靠的通信协议, 优先实时传输, 但已知传输协议, 对NCS的研究意义较小, 且通用性较差; 2) 从控制的角度, 研究如何在NCS中对延时和数据包进行补偿, 以使系统具有更好的性能.方法2)有2种解决方案: 一种是利用系统模型与额外的系统动态信息, 修正已有控制系统; 网络传输额外的被控对象特性信息, 加重了网络带宽的负载, 甚至可能导致网络拥塞; 在控制系统回路中减少通信网络信息的传输, 可缓解网络传输的不确定性对系统性能的影响[2]; 另一种是利用延时和数据包丢失的时序和概率等统计学特性, 设计新的控制系统结构, 前提条件是已知延时与数据包丢失的统计学特性, 被动补偿延时和数据包丢失的影响, 具有一定的保守性.目前, 研究者们已将时滞系统理论应用到网络控制系统, 将具有延时和丢包的网络控制系统表示为时滞系统, 进而利用时滞理论研究NCS的各种影响因素, 但由于网络延时具有随机性和时变性, 因此时滞系统已有的控制方法不完全适合于网络控制系统[5].文献[6]针对延时和数据包丢失问题, 应用Lyapunov-Krasovskii构造包含网络诱导延时上下界及通过引入积分不等式, 达到减少保守性的效果; 文献[7]提出一种新网络预测控制机制, 该方法主动地补偿网络控制系统延时和数据包丢失, 以使闭环控制系统达到预先设计的效果, 消除网络传输不确定性导致的不良影响; 文献[8]通过在控制节点设置缓冲器, 设计了控制预估器和延时补偿器; Suykens等[9]在标准支持向量机统计学理论的基础上, 提出使用最小二乘支持向量机(LS-SVM)解决分类和函数估计问题, 采用解线性方程组代替传统支持向量机解二次规划问题, 并应用到非线性函数估计领域[10]; 文献[11]基于LS-SVM双模控制算法, 分析了采用该方法闭环系统的稳定性.
针对实时信号网络传输, 由网络的引入延时和数据包丢失对系统性能的影响, 本文提出一种将LS-SVM预测技术应用到网络控制系统建模的方法.从控制的角度, 通过同步LS-SVM模型预测网络控制系统传输的实时信号, 能有效缓解控制系统由于非理想条件网络传输不确定性所引起不利因素的影响.从网络通信的角度, 在系统稳定性的前提下, 减少了控制系统不必要的通信开销.
1 LS-SVM在实时信号传输中的应用
1.1LS-SVM模型

其中:γ表示正则化参数(惩罚因子);b表示常值偏差;ei表示误差变量.构造式(1)-(2)的Lagrange函数, 表达式为

其中αi为Lagrange乘子.根据Karush-Kuhn-Tucker(KKT)最优条件, 并对i=1,2,…,N消去ei和w后, 得到简化后的线性方程组如下:
最后得到回归型LS-SVM模型, 对t+1时刻的预测值如下:
1.2LS-SVM预测在实时信号传输上的应用
本文将LS-SVM预测与误差阈值调度策略相结合构建实时信号传输系统.LS-SVM预测模型在智能传感器端和应用端各有一个且同步, 并由误差阈值调度策略控制模型参数数据帧网络传输, 弥补了传统方法周期性传输采样信号占用大量网络带宽和不必要网络通信的缺陷, 提高了系统的可靠性.
从结构上看, 智能节点和应用端分布在不同的地理空间, 用户不能直接获得采样信号.网络实时信号的传输受到延时、数据包丢失等非理想网络状况的影响[12].通过同步的LS-SVM预测模型缓解这些不利因素对信号传输的影响, 并满足用户对信号网络传输实时性的要求.
在许多实际应用场合, 用户关心的是在预先指定、与应用相关的精确度下观测物理现象.因此, 所收集到的传感器数据若位于已知的误差范围[-ε,+ε](ε∈+)时将会被接受.在智能传感器中误差阈值通信调度策略根据采用的规则确定模型参数数据帧是否发送到网络.对于预定义的ε>0, 其规则定义如下:

针对实时信号网络传输问题, 提出了提高网络控制系统稳定性的方法: 即首先使用智能传感器采集N组信号样本数据, 选取合适参数以完成采样信号到LS-SVM预测模型的转化.然后计算模型预测值和真实值间的偏差范数, 由误差阈值调度策略甄别模型参数数据帧是否发送.若发送, 则智能传感器端同步更新模型参数信息.在应用端, 如果收到模型参数数据帧, 则更新模型参数; 若未收到模型参数数据帧, 则模型参数保持不变.应用端并没有收到真实的信号值, 而是根据本地同步的LS-SVM模型计算估计出当前或未来时刻智能传感器的采样信号值, 可有效解决延时和数据包丢失的问题.
2 网络控制系统建模方法
2.1基本思想
网络是一种可靠性较差的数据传输通道.在网络控制系统运行过程中, 数字通信网络通常仅在某些特定的时间内传输信号信息.控制器无法时刻接收到被控对象的输出, 被控对象也无法自由地接收到控制器发出的控制信号.即使是通过提高采样速率的方法降低延时, 对于控制器和执行器, 传感器数据也不能随时得到.在实际控制系统, 传感器与控制器、控制器与执行器间, 通过网络传输大量的实时信号.由于网络传输影响是动态、随机和难以预知的, 具有较强的非线性特性, 使原有线性时间序列的分析方法难以适应经由网络传输信号预测恢复, 因此使用LS-SVM预测技术补偿由于非理想条件网络传输不确定性产生的影响.目前的研究方法中, 状态估计器能利用在网络中传输的系统输出值生成未来时刻的控制信号量和被控对象输出值.本文方法与现有研究结果中的状态估计器类似, 是一种将误差阈值调度策略与信号预测技术相结合构建控制系统模型的新方法.该方法从实时信号网络传输处理的角度出发, 通过预测未来时刻的控制信号量和被控对象输出使网络控制系统更稳定.利用LS-SVM预测模型可提供这些预测值以使闭环系统能达到期望的控制性能, 消除非理想条件下网络传输不确定性带来的不良影响.
网络控制系统结构框图如图1所示.由图1可见, 网络控制系统主要分为前向通道和反向通道两部分.由于非理想网络传输的影响, 使各智能节点通过构建满足误差范围内的LS-SVM模型实现.LS-SVM预测模型的设计主要分克服前向和反向通道的延时和数据包丢失, 在智能传感器和远程控制器端设置缓冲区, 存储长度为N的采样序列和控制信号序列.该序列用滚动方法管理, 即在误差范围内, 则更新序列; 超出误差范围内, 则由缓冲区中的序列建立新的LS-SVM预测模型, 并由误差调度策略决定模型参数的发送.缓冲区长度N的大小需要在计算复杂度和网络传输数据帧大小间进行有效权衡.
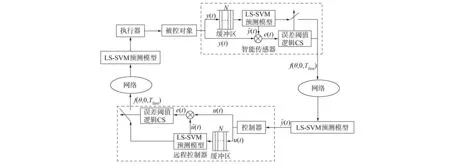
图1 基于LS-SVM的实时信号传输系统Fig.1 LS-SVM-based transmission system of real-time signals
2.2LS-SVM模型算法
在基于LS-SVM理论的网络控制系统中, 执行器从本地LS-SVM预测模型中获取相应时刻控制信号的估计值作用于被控对象; 控制器从本地LS-SVM预测模型中获取相应时刻的被控对象输出估计值, 计算控制信号.误差阈值调度策略传输决定更新LS-SVM模型参数的传输, 极大减少了网络中信号的传输量.
模型发送端主要步骤如下:
1) 系统时钟同步过程.发送时钟同步数据帧fsyn(0,0,0)(网络中传输的数据帧格式, LS-SVM模型参数θ, 模型更新的初始时刻Tfirst), 并记录发送时间ts, 等待模型接收端的回复.
2) 如果在截止时间前接收确认帧, 则转3); 如果重传次数计数器中的值小于3, 则转1); 否则退出程序.
4) 设置缓冲区大小为N, 假设当前时刻是t-1, 建模为(t-N)~(t-1)时刻的数据, 则此时缓冲区数据序列为Bbuf(x(t-1),x(t-2),…,x(t-N)).
5) 利用缓冲区中的数据序列, 设置参数(γ,δ)后, 使用本文算法进行训练, 建立LS-SVM预测模型, 解得参数ai和b, 发送模型参数数据帧f(θ,0,Tfirst), 并更新本地的LS-SVM预测模型.

Bbuf(x(t),x(t-1),…,x(t-N+1));
如果所有数据帧传输结束, 则退出; 否则, 转5).
模型接收端主要步骤如下:
3) 如果接收到更新的模型参数数据帧f(θ,0,Tfirst), 则转4); 否则转5).
4) 对接收到的数据帧, 计算核函数, 更新接收端LS-SVM预测模型.
5) 根据式(5)预测当前或未来时刻的数据估计值.
3 系统描述
假设:
1) 传感器采样为时间驱动的, 采样周期为Ts, 模型参数信息的发送采用事件驱动;
2) 控制器和执行器均采用时间驱动, 以固定周期Ts, 由LS-SVM预测模型中获得信号的估计值.
被控对象的状态空间模型如下:



4 稳定性分析
对式(5)中的核函数进行Taylor展开[13], 中心点设为x0, 并记Ki(x)=K(x,xi), 则
其中
取x0=0, 则Ci=Ki(x0).y(t)的离散差分形式表示为

其中:


由式(11)得

(13)
定义增广向量Z(t)为系统状态:

则整个系统可表示为
Z(t+1)=ΦsZ(t),
其中
对离散控制系统进行稳定性分析, 其判定系统是渐近稳定的充要条件为: 矩阵Φs对应的所有特征解都位于Z平面的单位圆内.
5 仿真实例
5.1仿真环境
TrueTime是以MATLAB为平台的网络控制系统仿真工具包, 能搭建网络化的实时控制系统, 可模拟网络中的延时和数据包丢失等参数信息, 仿真研究网络传输对系统性能的影响.本文采用TrueTime-2.0实时网络控制工具箱进行系统仿真实验.仿真时间为2 s, 采样周期Ts=10 ms.模型LS-SVM中训练样本数为20, 参数γ=537,δ=0.2, 预测误差阈值ε=0.002.
5.2实验
被控对象模型为:
控制器模型为:
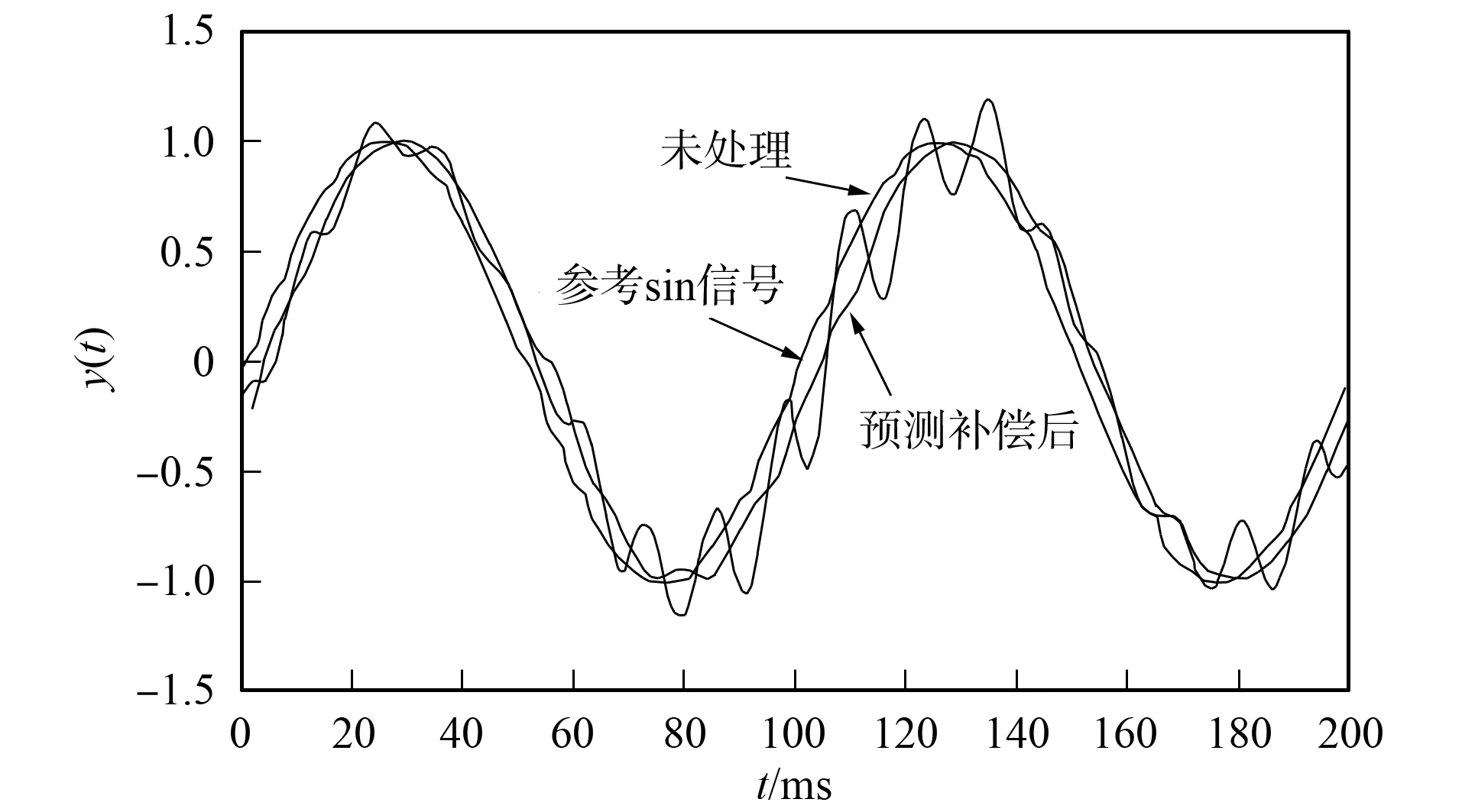
图2 仿真结果Fig.2 Simulation result
仿真结果如图2所示.由图2可见, 在未经过处理的NCS中, 由于数据包丢失和网络延时问题的存在, 使系统的振荡加剧, 性能下降.而采用本文提出的LS-SVM模型预测补偿, 可显著改善系统的性能.
综上所述, 本文提出了一种将LS-SVM预测技术应用到网络控制系统建模的方法, 缓解了网络传输的不确定问题.在保证网络控制系统实时性和稳定性的同时, 减少了对网络带宽的需求.由TrueTime-2.0工具箱进行仿真实验的结果表明, 本文方法可行.
[1]李洪波, 孙增圻, 孙富春.网络控制系统的发展现状及展望 [J].控制理论与应用, 2010, 27(2): 238-243.(LI Hongbo, SUN Zengqi, SUN Fuchun.Networked Control Systems: An Overview of State-of-the-Art and the Prospect in Future Research [J].Control Theory & Applications, 2010, 27(2): 238-243.)
[2]陈惠英, 王万良, 李祖欣.基于误差阈值的网络控制系统通信调度 [J].信息与控制, 2009, 38(5): 580-584.(CHEN Huiying, WANG Wanliang, LI Zuxin.Communication Scheduling of Networked Control System Based on Error Threshold [J].Information and Control, 2009, 38(5): 580-584.)
[3]SUN Jiandong, JIANG Jingping.Delay and Data Packet Dropout Separately Related Stability and State Feedback Stabilisation of Networked Control Systems [J].Control Theory & Applications, 2013, 7(3): 333-342.
[4]Liu X, Dai Y, Gao L.Fault-Tolerant Control of Networked Control Systems with Time-Varying Delay [C]//2013 10th IEEE International Conference on Control and Automation.[S.l.]: IEEE, 2013: 750-754.
[5]LI Xuan, WU Xiaobei, GAO Jian.Observer-Based Guaranteed Cost Fault-Tolerant Controller Design for Networked Control Systems [J].Information Technology Journal, 2011, 10(2): 394-401.
[6]陈刚, 阳春华, 朱红求.考虑时延与丢包的网络控制系统分析与综合 [J].系统工程与电子技术, 2012, 34(2): 342-347.(CHEN Gang, YANG Chunhua, ZHU Hongqiu.Analysis and Synthesis for Networked Control Systems with Network-Induced Delay and Data Dropout Problems [J].Systems Engineering and Electronics, 2012, 34(2): 342-347.)
[7]Liu G P.Predictive Controller Design of Networked Systems with Communication Delays and Data Loss [J].IEEE Transactions on Circuits and Systems-Ⅱ: Express Briefs, 2010, 57(6): 481-486.
[8]王瑞敏, 费树岷, 柴琳.网络控制系统的预测补偿 [J].控制理论与应用, 2011, 28(10): 1473-1479.(WANG Ruimin, FEI Shumin, CHAI Lin.Predictive Compensation for Network Control Systems [J].Control Theory & Applications, 2011, 28(10): 1473-1479.)
[9]Suykens J A K, Vandewalle J.Least Square Support Vector Machine Classifier [J].Neural Processing Letters, 1999, 9(3): 293-300.
[10]张倩, 杨耀权.基于支持向量机回归的火电厂烟气含氧量软测量 [J].信息与控制, 2013, 42(2): 258-263.(ZHANG Qian, YANG Yaoquan.Soft-Sensor for Oxygen Content in Flue Gas of Coal-Fired Power Plant Based on SVR [J].Information and Control, 2013, 42(2): 258-263.)
[11]阎纲, 梁昔明, 龙祖强, 等.基于最小二乘支持向量机的双模控制 [J].信息与控制, 2011, 40(6): 721-727.(YAN Gang, LIANG Ximing, LONG Zuqiang, et al.Double Mode Control Based on Least Squares Support Vector Machine [J].Information and Control, 2011, 40(6): 721-727.)
[12]董劲男.基于多项式预测滤波的实时信号网络传输技术及应用研究 [D].长春: 吉林大学, 2008.(DONG Jinnan.Study on PPF-Based Real-Time Signal Network Transmission Technology and Its Applications [D].Changchun: Jilin University, 2008.)
[13]张日东, 王树青, 李平.基于支持向量机的非线性系统预测控制 [J].自动化学报, 2007, 33(10): 1066-1073.(ZHANG Ridong, WANG Shuqing, LI Ping.Support Vector Machine Based Predictive Control for Nonlinear Systems [J].Acta Automatica Sinica, 2007, 33(10): 1066-1073.)
AUniversalModelingMethodforNetworkedControlSystemBasedonLeastSquaresSupportVectorMachines
SUN Dan1, QIN Guihe1, DONG Jinnan1,2, CHEN Hong2
(1.CollegeofComputerScienceandTechnology,JilinUniversity,Changchun130012,China;
2.CollegeofCommunicationEngineering,JilinUniversity,Changchun130012,China)
In connection with the real-time signal transmission of networked control system, least squares support vector machine theory was used to predict and compensate bad effects caused by transmission uncertainties so as to establish a model of networked control system.Experiments were carried out to validate the correctness and applicability of this method.The simulation results show that least squares support vector machine modeling can improve the dynamic performance and stability of networked control system, which makes up the periodic transmission of sampled signals taking up a lot of network bandwidths and unnecessary network traffic defects, and improve the system reliability.
networked control system (NCS); least squares support vector machine (LS-SVM); predictive compensation; modeling
2013-12-13.
孙 丹(1989—), 女, 汉族, 硕士研究生, 从事智能控制与嵌入式系统的研究, E-mail: sundanhappy@163.com.通信作者: 董劲男(1980—), 男, 汉族, 博士, 讲师, 从事网络控制的研究, E-mail: dongjinnan@jlu.edu.cn.
国家自然科学基金(批准号: 61034001).
TP13
A
1671-5489(2014)06-1277-07
10.13413/j.cnki.jdxblxb.2014.06.32
韩 啸)
猜你喜欢
数学物理学报(2021年1期)2021-03-29
家庭影院技术(2020年12期)2021-01-18
自动化仪表(2020年10期)2020-11-13
电子制作(2018年18期)2018-11-14
网络安全和信息化(2018年4期)2018-11-09
家庭影院技术(2017年12期)2017-02-06
船舶力学(2015年6期)2015-12-12
汽车维护与修理(2014年10期)2014-02-28
河南科技(2014年23期)2014-02-27
深圳信息职业技术学院学报(2013年3期)2013-08-22
