
一个新四维混沌系统的分岔分析
2014-09-15 04:29杜文举俞建宁张建刚安新磊
东北师大学报(自然科学版) 2014年1期
杜文举,俞建宁,张建刚,安新磊
(兰州交通大学数理学院,甘肃 兰州 730070)
18世纪以来,科学家对天体力学、流体力学和非线性振动中的一些失稳现象的研究发现了分岔现象.对于含参数的系统,当参数变动并经过某些临界值时,系统的拓扑结构发生本质的变化,我们称这种变化为分岔.Hopf分岔是一类比较简单但很重要的动态分岔问题.它不仅在动态分岔研究和极限环研究中有着重要的理论价值,而且它密切联系着自激振动产生的问题,所以在解决实际问题中也有着很广泛的应用.随着人们对分岔现象的研究,分岔理论已经取得了很大研究成果.文献[1]讨论了一个混沌系统的霍普夫分岔情况,并通过计算系统的第一Lyapunov系数,判断了其分岔的方向,对相应的动力系统行为也做了简要的分析.文献[2]研究了一个类Lorenz系统,详细讨论了该系统的稳定性,运用第一Lyapunov系数法分析系统平衡点的Hopf分岔情况.文献[3]通过严格的数学推导及数值仿真研究了一个新的类Lorenz系统,得到了平衡点稳定性及Hopf分岔的参数条件,通过对系统的第一Lyapunov系数的分析,推导出系统发生余维二退化Hopf分岔的参数条件.文献[4]提出了一个新的三维自治类Lorenz系统,理论分析了该系统的动力学特性,并通过数值计算分析了系统在平衡点处的稳定性,以及产生Hopf分岔的条件.目前已经有很多关于这方面的文献和专著[5-14],文献[5]基于一个三维混沌系统构造了一个新的四维超混沌系统,并分析了该系统平衡点的稳定性、吸引子的相图、系统的分岔图和Lyapunov指数谱等基本动力学特性.然而,文献[5]并未对系统的Hopf分岔进行研究,本文将通过中心流形理论和范式理论,对该系统的Hopf分岔行为进行详细研究.
1 新的四维混沌系统
文献[5]提出了一个新的四维自治混沌系统,其状态方程为:
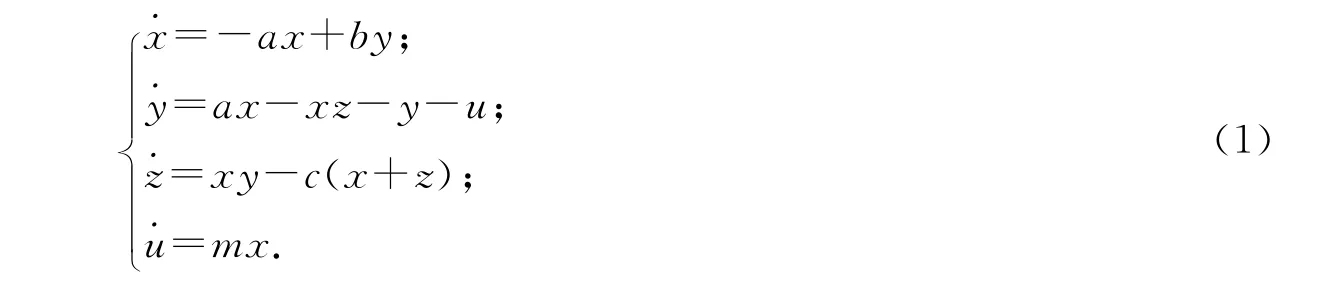
其中:x=(x,y,z,u)T∈R4为系统的状态变量;a,b,c,m 是实参数.当参数a=20,b=35,c=5,m=4时,系统(1)存在一个混沌吸引子,如图1所示.

图1 系统(1)在不同空间的吸引子
本文采用 Wolf算法,计算得到系统(1)的4个Lyapunov指数:λ1=0.3477,λ2=0.1983,λ3=0,λ4=-26.4303.并由Kaplan-Yorke猜想公式,求得Lyapunov维数DKY=3.02065.系统(1)的时间响应图、庞加莱截面、Lyapunov指数谱图及其功率谱图如图2所示.

图2 系统(1)得到的各种谱图
2 平衡点稳定性分析
令方程组(1)的右边等于零,即

可以解得系统有唯一的平衡点E0=(0,0,0,0).
定理1 如果a>-1,mb>0,a(1-b)>0,c>0且

这时,平衡点E0渐近稳定.
证明 系统(1)在平衡点E0=(0,0,0,0)处的Jacobian矩阵为

求得系统(1)在平衡点E0处Jacobian矩阵的特征方程为

根据Routh-Hurwitz判据,可知方程(5)的一切根的实部为负数的必要且充分条件是不等式

成立.所以,当满足以上条件时,平衡点E0渐近稳定.
定理2 如果方程(5)有一对纯虚根λ1,2=±iω0,并且Re(λ′m(m0))≠0.若有a>0,b<0,c>0,当m穿过临界值m0时,系统(1)在平衡点E0发生Hopf分岔.
证明 令λ=iω(ω>0)为方程(5)的根,则有

分离以上方程的实部和虚部,通过计算有

方程(4)的4个特征值为:

对方程(4)两边同时关于m求导,有

根据上式可得

根据文献[6]中的Hopf分岔理论,可知m0便是分岔的临界值.假设a>0,b<0,c>0,当m穿过临界值m0时,系统(1)在平衡点E0发生Hopf分岔.
3 平衡点E0的Hopf分岔分析
在理论分析之前,我们先回顾一下文献[7]中介绍的对于四维系统Hopf分岔的第一Lyapunov系数的求法.
考虑如下系统

其中x∈R4,ζ∈Rm分别是系统的状态变量和控制参数.假设系统(7)有一个平衡点x=x0,ζ=ζ0,并且变量x-x0仍然记做x,则F(x)=f(x,ζ0)的泰勒展开式为

其中A=fx(0,ζ0),并且对i=1,2,3,4有

假设在平衡点(x0,ζ0)系统(7)的Jacobian矩阵有一对纯虚根λ2,3=±iω0(ω0>0),并且其他的特征值没有零实部.
令p,q∈C4满足

其中AT为A的转置.则第一Lyapunov系数可以定义为

其中:

I4为4×4的单位矩阵.
当a>0,b<0,c>0,m=m0时,我们讨论平衡点E0处的Hopf分岔.根据(9)式,可以计算得对应于f的线性函数

通过直接的计算可以求得满足(10)式的特征向量

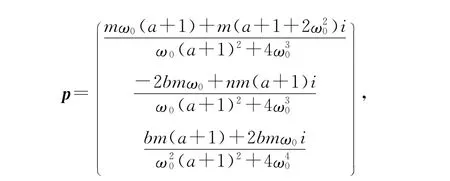
并且有

其中:

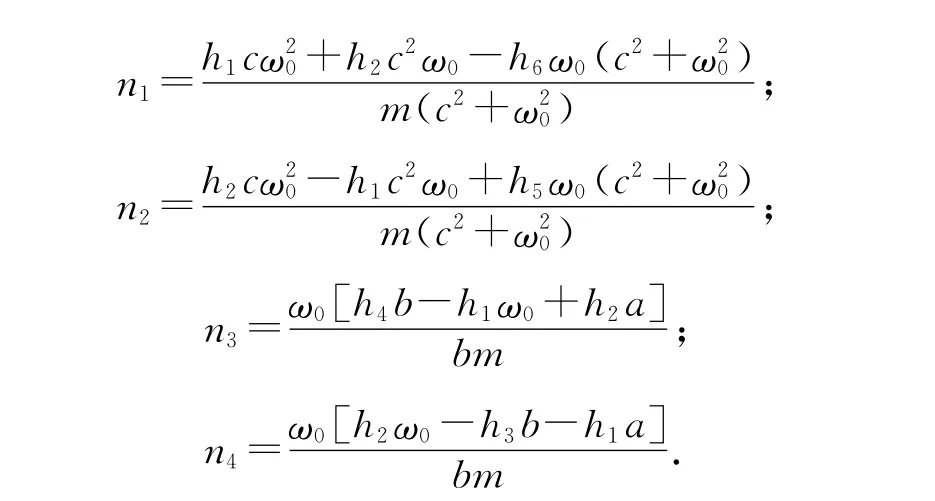
同样可以得到
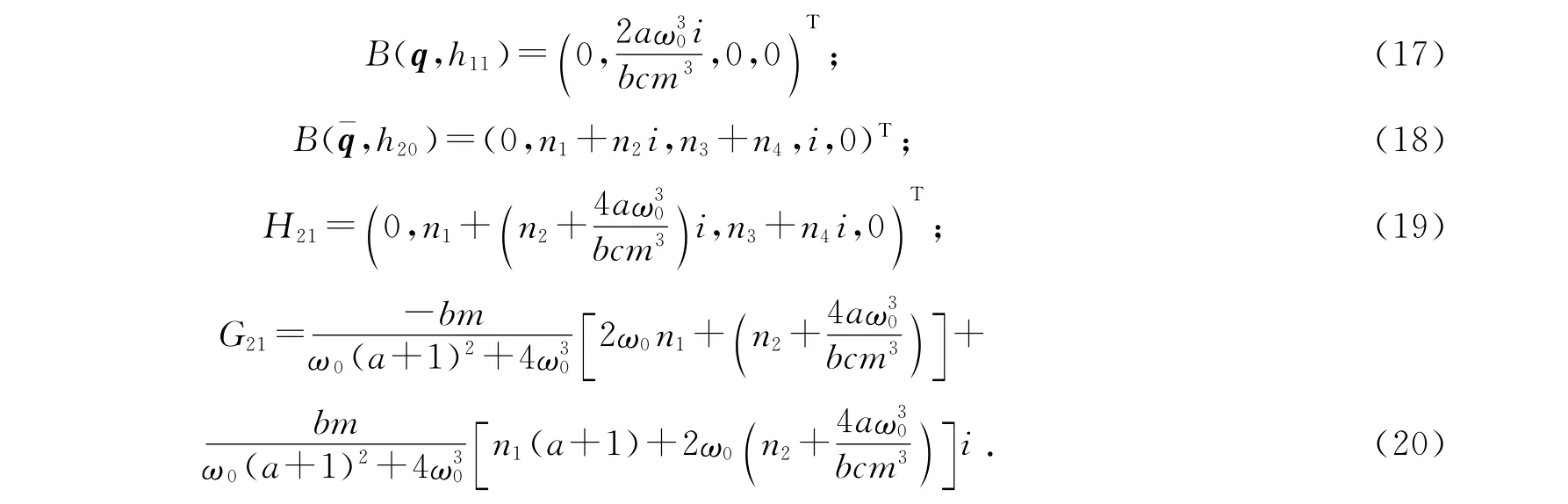
其中:
定理3 系统(1)在平衡点E0处的第一Lyapunov系数为

如果l1≠0,则此时系统(1)在平衡点E0处发生非退化的Hopf分岔.如果l1=0,则系统(1)在平衡点E0处发生余维二的Bautin分岔.
4 数值仿真
为了验证以上的理论分析,我们选取一组参数:a=2,b=-1,可以得到Hopf的临界值m0=-12.当m=-10>m0时,平衡点是稳定的;当m=-14<m0时,平衡点是不稳定的,分别如图3—5所示.根据前面的结论,并且经过复杂的计算得到l1=-0.362681<0,则系统(1)在平衡点E0的Hopf分岔是超临界的Hopf分岔,并且产生一个稳定的极限环.
当固定参数a=20,b=35,m=4,参数c∈[0,1]变化时,系统(1)的Lyapunov指数谱和关于x的分岔图如图6所示.随着c的不断变化,系统的Lyapunov指数在变化,系统的状态也在跟着发生改变.当c∈(0,0.18)时,系统(1)处于拟周期运动状态.当c∈(0.18,0.4)时,系统(1)处于周期运动状态.当c∈(0.4,1)时,系统处于混沌状态.
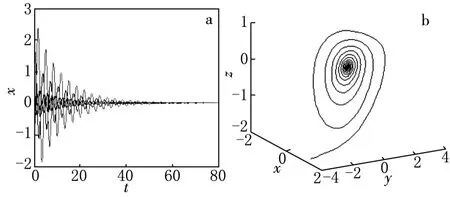
图3 当a=2,b=-1,c=5,m=-10时,系统(1)的时间响应图(a)和相图(b)
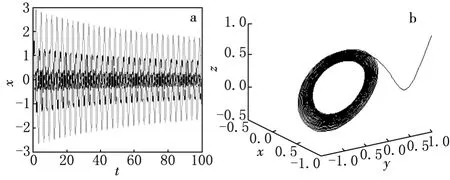
图4 当a=2,b=-1,c=5,m=-12时,系统(1)的时间响应图(a)和相图(b)
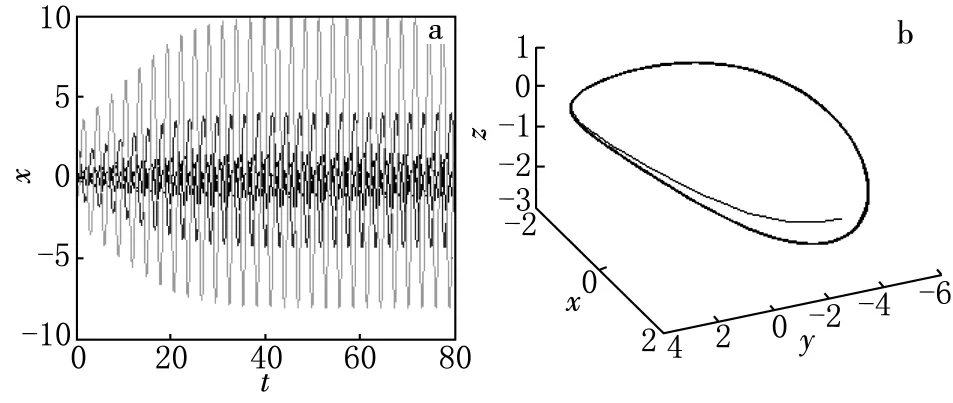
图5 当a=2,b=-1,c=5,m=-14时,系统(1)的时间响应图(a)和相图(b)

图6 参数c变化时系统(1)关于x的分岔图(a)和Lyapunov指数谱图(b)
当固定参数a=20,b=35,c=5,参数m∈[50,70]变化时,系统(1)的Lyapunov指数谱和关于x的分岔图如图7所示.当m∈(50,55)时,系统(1)处于混沌状态;当m∈(55,55.8)时,系统(1)处于周期运动状态;当m∈(55.8,57)时,系统又近于混沌状态;当m∈(57.59.5)时,系统处于四周期运动状态;当m∈(59.5,66)时,系统处于二周期运动状态;当m∈(66,70)时,系统处于一周期运动状态.当m取不同值时,系统(1)的相图如图8所示.
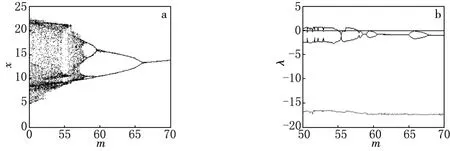
图7 参数m变化时系统(1)关于x的分岔图(a)和Lyapunov指数谱图(b)
固定a=20,c=5,系统(1)在平衡点E0的特征多项式为

当b<1,mb>0,420(1-b)>mb时,平衡点E0渐近稳定;当b<1,mb>0,420(1-b)=mb时,满足Hopf分岔发生的参数条件.令b=1,mb=0,420(1-b)-mb=0,画出b-m参数空间上平衡点的稳定域,如图9所示.其中曲线Li,i=2,3,4分别代表b=1,mb=0和420(1-b)-mb=0,在曲线L4上满足 Hopf分岔发生的参数条件.区域(Ⅰ):b<1,mb>0,420(1-b)>mb,在区域(Ⅰ)上平衡点E0渐近稳定,其他区域平衡点E0都不稳定.结合图9,取b=-8,则它与L4相交点即为Hopf分岔点,可以求得分岔临界值m0=-472.5.此时,系统发生Hopf分岔有一个极限环产生,如图10b所示.图10a,c和d分别为取区域(Ⅰ)、区域(Ⅷ)和区域(Ⅵ)中的点所得到的相图,与图1的理论分析相符合.

图8 m取不同值时系统(1)的相图
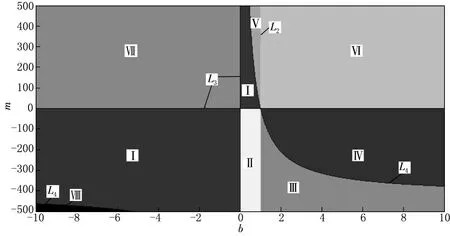
图9 系统(1)在参数平面(b,m)上的稳定域

图10 系统(1)在b和m不同参数下的相图
固定b=35,c=5,系统(1)在平衡点E0的特征多项式为

当-1<a<0,m>0,-34a(a+1)>35m时,平衡点E0渐近稳定;当-1<a<0,m>0,-34a(a+1)=35m时,满足Hopf分岔发生的参数条件.令a+1=0,-34a=0或35,m=0,-34a(a+1)-35m=0,画出a-m参数空间上平衡点的稳定域,如图11所示.其中曲线Li,i=1,2,3,4分别代表a+1=0,-34a=0或35,m=0和-34a(a+1)-35m=0,在曲线L4上满足Hopf分岔发生的参数条件.区域(Ⅰ):-1<a<0,m>0,-34a(a+1)>35m,在区域(Ⅰ)上平衡点E0渐近稳定,其他区域平衡点E0都不稳定.结合图11,取a=-0.5,则它与L4相交点即为 Hopf分岔点,可以求得分岔临界值m0=0.24286.此时,系统发生Hopf分岔有一个极限环产生,如图12b所示.图12a,c和d分别为取区域(Ⅰ)、区域(Ⅲ)和区域(Ⅶ)中的点所得到的相图,与图1的理论分析相符合.

图11 系统(1)在参数平面(a,m)上的稳定域
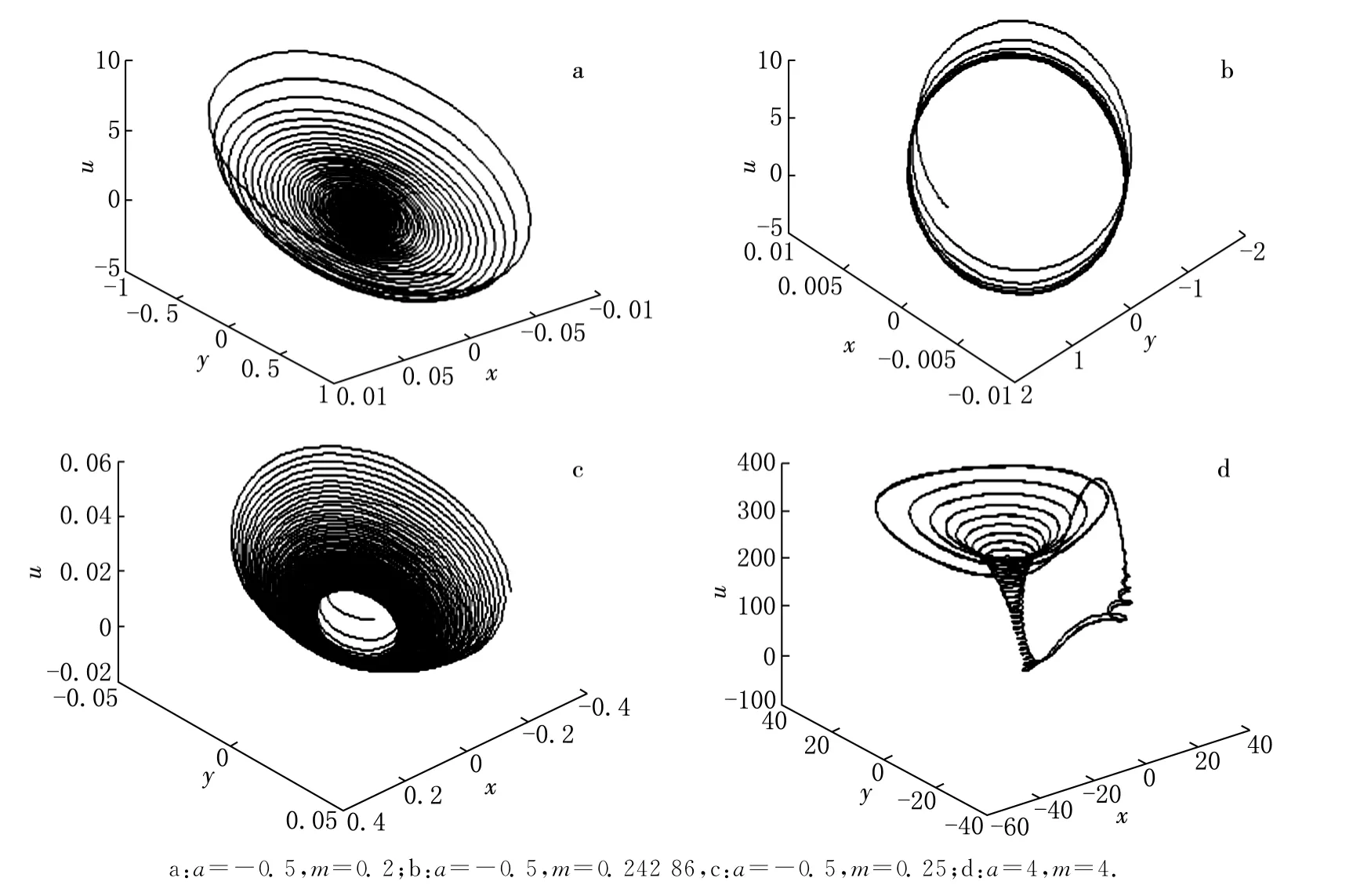
图12 系统(1)在a和m不同参数下的相图
5 结论
本文通过严格的数学推导及数值仿真研究了一个新三维混沌系统,理论分析了该系统的平衡点的稳定性,通过选取适当的分岔参数,证明了当分岔参数经过临界值时系统发生了Hopf分岔.通过计算系统的第一Lyapunov系数判断了分岔的方向和稳定性.然后进行了数值模拟,验证了理论推导的正确性.
[1]彭国俊.一个混沌系统的霍普夫分岔分析[J].柳州师专学报,2007,22(1):124-126.
[2]DIAS F S,MELLO L F,ZHANG J G.Nonlinear analysis in a Lorenz-like system [J].Nonlinear Analysis Real World Applications,2010,11:3491-3500.
[3]李群宏,徐德贵.一个类Lorenz系统的动力学分析[J].重庆理工大学学报,2011,25(2):112-116.
[4]李险峰,张建刚,褚衍东,等.一个新类Lorenz混沌系统的动力学分析及电路仿真[J].动力学与控制学报,2007,5(4):324-329.
[5]高智中,韩新风,章毛连.一个新的四维超混沌系统及其电路仿真[J].东北师大学报:自然科学版,2012,44(1):77-83.
[6]HASSARD,B D,KAZARINOFF,N D,WAN Y H.Theory and applications of Hopf bifurcation[M].Cambridge:Cambridge University Press,1981:1-86.
[7]KUZNETSOV Y A.Elements of applied bifurcation theory[M].New York:Springer,2004:293-313.
[8]ZHUANG K J.Hopf bifurcation for a new chaotic system [J].International Journal of Computational and Mathematical Sciences,2010,4:358-361.
[9]褚衍东,湛宁,安新磊,等.一个具有四翼混沌吸引子的新系统及其参数辨识[J].兰州大学学报,2012,48(2):136-140.
[10]ZHANG K M,YANG Q G.Hopf bifurcation analysis in a 4D-hyperchaotic system [J].J Syst Sci Complex,2010,23:748-758.
[11]薛怀庆,彭建奎,王振乾,等.超混沌Lorenz系统的电路模拟与同步[J].兰州大学学报,2011,47(5):117-121.
[12]SPARROW C.The lorenz equations:bifurcations,chaos and strange attractors[M].New York:Springer Verlag,1982:26-43.
[13]SOTOMAYOR J,MELLO L F,BRAGA D C.Bifurcation analysis of the Watt governor system[J].Computational & Applied Mathematics,2007,26(1):19-44.
[14]ZHANG J G,LI X F,CHU Y D,et al.Hopf bifurcations,Lyapunov exponents and control of chaos for a class of centrifugal flywheel governor system[J].Chaos,Solitons and Fractals.2009,39(5):2150-2168.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
泰山学院学报(2019年6期)2020-01-14
中学生数理化·七年级数学人教版(2018年11期)2019-01-31
烟台果树(2019年1期)2019-01-28
娃娃乐园·综合智能(2018年23期)2018-12-26
传媒评论(2018年7期)2018-09-18
娃娃乐园·综合智能(2018年3期)2018-03-22
中国照明(2016年6期)2016-06-15
IT时代周刊(2015年7期)2015-11-11
天津商务职业学院学报(2015年2期)2015-02-28
