一种基于混合高斯的快速背景更新方法
2014-09-18 00:15谢正光马文萱
电视技术 2014年15期
徐 伟,谢正光,张 辉,马文萱
(南通大学电子信息学院,江苏南通 226019)
在视觉监控系统中,往往需要对运动目标进行检测、跟踪、分类和分析等,而运动目标检测的准确性直接影响着后续的操作。为了适应复杂多变的场景变化,最常用的方法就是对背景建模,然后利用背景差分检测出运动物体。因此研究出良好的背景提取算法和自适应的背景更新模型是非常重要的[1]。
近年来,很多研究者针对实际的应用场景提出了许多不同的背景建模方法[2],现有的背景建模方法主要有中值法[3]、均值法[4]、核密度估计法[5]、RunningAvg 背景更新算法[6]、近似中值滤波[7]、码本模型[8]、混合高斯模型[9]等。其中,中值法、均值法和核密度估计法主要是通过存储大量过去时刻的图像序列,并根据这些连续图像对应像素的统计特性来估计背景模型的,这种方法能防止单帧图形的干扰,但占用内存较大。RunningAvg更新算法是用当前帧与前面帧进行加权迭代来更新背景,其优点是背景更新速度很快,但背景中容易产生拖影现象。递归类方法,如近似中值滤波、码本模型、混合高斯模型等,需要的存储空间较少,根据当前帧的像素递归地更新背景模型,这使得前面帧在建模时出现的错误会对背景造成长时间的影响,而大部分方法是使用权重来去除这种错误反馈的。其中,由于混合高斯模型对于处理复杂、缓慢变化的背景有较好的效果,因此被广泛应用于背景建模中。但传统的混合高斯背景模型对场景的突然变化敏感性不强,不能实时更新。针对此问题,一些研究学者也根据各自的应用进行了改进[10-11]。如文献[10]中通过混合高斯和帧间差分相融合的自适应背景模型,对不同区域采取不同的背景更新策略,有效地解决了场景中物体由静止转为运动状态这种情况所引起的背景变化,但此方法中目标的检测和提取易受颜色变化阈值的影响,对场景中物体由运动转为静止状态的情况并未给出满意的解决方法。
本文结合RunningAvg更新算法能快速更新背景的特点,提出了一种基于混合高斯的快速背景更新方法。这里旨在解决场景中运动物体驶停和静止物体驶离两种情况所引起的背景变化问题。针对RunningAvg背景中存在的拖影现象和混合高斯对场景突然变化更新速度慢的问题,本文通过以下步骤来解决:1)建立两幅背景,用它们的二值化差分图像DB来获取背景变化区域,将DB与前景的二值化图像FB逻辑“与”来消除变化区域中存在的拖影现象;2)用状态表保存变化区域信息,根据背景变化区域的变化情况,通过状态表更新机制对背景模型进行有选择地更新。
1 背景变化区域提取及相关算法介绍
考虑在同一场景中,如果同时对场景的变化区域进行背景更新,RunningAvg方法仅需要很少的帧数就可以完成背景更新,而混合高斯模型需要很长时间才能实现。根据两幅背景更新速度的不同,可以用它们的差分图像来获取变化区域。本文的算法流程如图1所示。
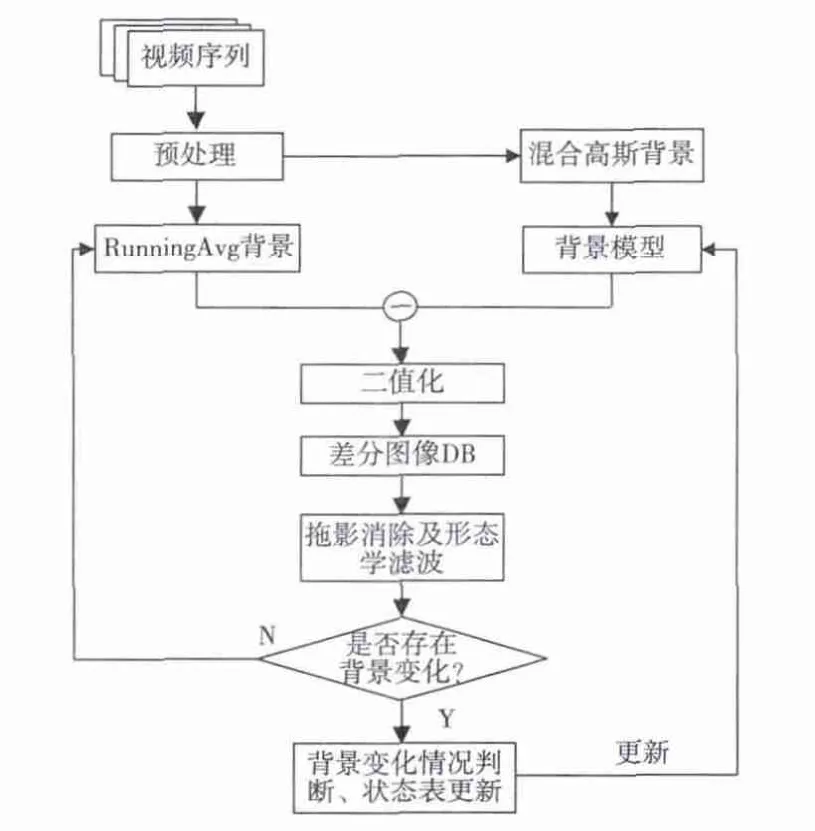
图1 算法流程图
1.1 背景的建立与RunningAvg背景更新算法
在算法实现过程中,首先用RunningAvg背景更新算法建立背景图像BAvg。RunningAvg背景更新算法[6]首先将视频图像第一帧作为初始背景,通过对下一帧进行加权迭代得到背景,每个像素更新的具体规则如下

式中:Bn(i,j)为第n帧更新后的背景值;Bn-1(i,j)为第n-1帧的背景值;In(i,j)为当前视频帧的灰度值;α为更新速率。
为了减小场景中环境变化和物体缓慢运动对背景更新造成的影响,本文对α进行了如下改进



接着,对差分图像D进行二值化处理,得到DB。这里用OSTU方法[12]选取出的阈值为25,此时的图像分割效果最佳。如果存在背景变化,则DB中会存在白色(即像素值为255)的区域,然而BAvg中存在拖影现象,所以DB中包括变化区域、部分拖影和噪声等。此时用原图像与BGauss进行背景差分,再经二值化得到前景图像FB,它包括变化区域和噪声等,那么可以对FB和DB进行逻辑“与”操作,如式(4)所示,从而消除了拖影带来的影响,使提取的变化区域更准确

最后,由于图像中存在噪声,所以在DB中往往会存在一些孤立的噪声点和小面积噪声,本文采用形态学腐蚀和膨胀去除[12],这样提取的目标更加合理,再对DB进行目标分割和连通域标定,在一定帧数后,可以得到稳定的背景变化区域,如果此时DB中有白色区域面积大于设定的阈值(本文取200),则判断有背景变化发生。j)|+|In(i,j)-In-1(i,j)|,常数(α1,α2)∈(0,1),这样可以更准确地控制背景图像的更新。
另外,用混合高斯模型建立的背景图像BGauss来初始化背景模型。混合高斯模型的基本思想是使用多个高斯分布表示序列图像中每个像素点的特征,如果当前帧中的某像素的特征与高斯分布相匹配,则被判定为背景像素,否则为前景像素。更多有关混合高斯模型的知识可参考文献[1]。
1.2 背景变化区域提取及拖影消除
在背景变化区域提取阶段,对RunningAvg背景BAvg和背景模型BGauss,进行差分处理,得到差分图像D
2 背景模型中变化区域的更新
2.1 背景变化情况判断
当检测到有背景变化发生时,静止物体驶离和运动物体停留这两种情况都能引起背景变化,所以需要对两种情况进行区分,从而实现背景模型的准确更新。
首先,由差分图像DB获取变化区域,用Canny算法提取变化区域的边缘轮廓特征。然后对混合高斯背景的对应区域提取边缘轮廓特征,如果存在与变化区域相似的边缘轮廓特征,这说明高斯背景中该区域原来是有静止物体存在的,可以判定背景变化是静止物体驶离引起的;否则,在混合高斯图像中并未检测到变化区域的边缘特征,可以判定是运动物体停留所引起的变化。
2.2 状态表初始化
在检测出背景变化区域后,为了检测这些区域的变化情况,本文用状态表来保存变化区域的信息。状态表结构如下所示:
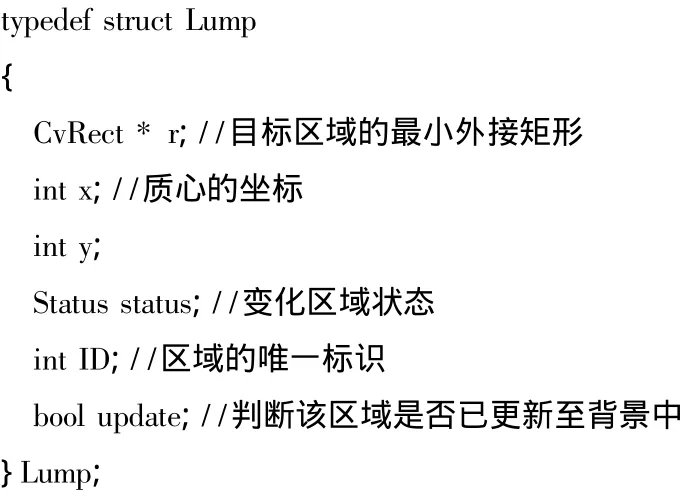
其中status的作用是表示背景变化区域的状态,本文设有stop,leave和unknow三种状态。另外,通过下面的步骤完成状态表初始化:
1)在首次检测到有背景变化时,需要对图像DB进行目标分割和连通域标定,去除不符合要求的小面积区域,再用边缘检测来检测出连通域的轮廓,得到其最小外接矩形。
2)利用Hu矩求出目标区域的质心坐标点等信息,对得到的目标区域按区域面积大小设置唯一ID号。根据引起背景变化情况的不同,进行如下处理:如果是静止物体离开场景,则将status标记为unknow状态,设置update为false;如果是运动物体停留,则将status标记为stop状态,设置update为false。此外,由于场景中存在运动物体停留一段时间后又驶离场景的情况,所以需要对此时的高斯背景进行备份,以便后续处理。
3)将这些信息保存到状态表中,完成状态表的初始化工作。
2.3 变化区域匹配算法
当场景中某时刻有可能出现多个变化区域(包括已更新至状态表的区域和新增区域),通过对此时状态表中已更新的区域和已检测到的变化区域进行区域匹配操作,并增加质心距离的判断,从而准确地从多个目标区域中将新增区域检测出来并更新至状态表中。
Hu M.K.在1961年利用代数不变矩理论构造出7个不变矩(简称Hu矩)具有旋转,缩放和平移不变性,并由此引起了广大研究者对不变矩的研究兴趣[13-14]。
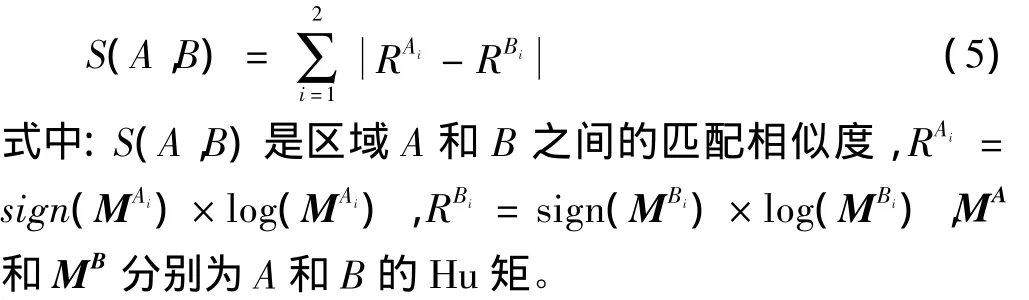
利用二阶和三阶归一化中心矩可以构造7个不变矩M1~M7,具体的Hu矩理论知识可参考文献[13]。本文通过比较两个目标区域的Hu矩的相似度来实现区域匹配操作的,表达式如下
2.4 变化区域的更新
通过状态表更新机制来控制背景模型中变化区域的更新。对状态表的准确更新是得到稳定背景的前提,所以在背景模型和状态表完成初始化后,状态表的更新可以分为场景中目标驶停检测和目标驶离检测两种情况:
1)目标驶停检测
如图2所示,每间隔T1帧,完成目标驶停检测,并实现状态表的更新后,对于状态表中未被更新至背景模型的静止物体区域,利用此时已稳定更新至RunningAvg背景中的静止物体区域来更新背景模型中的对应区域,并将该区域的update状态设为true。

2)目标驶离检测
一旦状态表初始化完毕,每隔T1帧,如果DB中存在静止物体驶离所引起变化的背景区域。则与图2类似,利用区域匹配算法对物体驶离区域完成状态表更新和背景模型更新,标记该区域status状态为leave,设置update为true。
此外,由于场景中可能存在物体停留一段时间后又驶离的情况,所以每隔T2帧(T2≪T1),遍历状态表中status状态标记为stop的变化区域,对原图像相应区域做三帧差分处理[15],并经二值化得到图像C,统计C中对应的各目标区域中像素值为255点的总数,如果小于区域面积的15%,就判定该目标区域仍保持停留状态,不做任何处理;否则判定该区域目标驶离场景,用已备份的高斯背景来更新背景模型中对应的背景暴露区域,并标记该区域status状态为leave,将update设为true。
按照上述的方法进行状态表更新后,可以实现背景模型及时准确的更新。
3 实验结果及分析
本文主要是在计算机视觉类库OpenCV的基础上,通过Visual C++6.0编程来实现上述算法的,其中T1=210,T2=3。测试视频的大小是384×288像素点,帧率是30帧/秒(f/s),这段测试视频描述的内容是车辆A和车辆B一先一后停留在场景中,经过较长的一段时间后,车辆B驶离了场景,而车辆A一直没有离开。实验结果如图3所示。
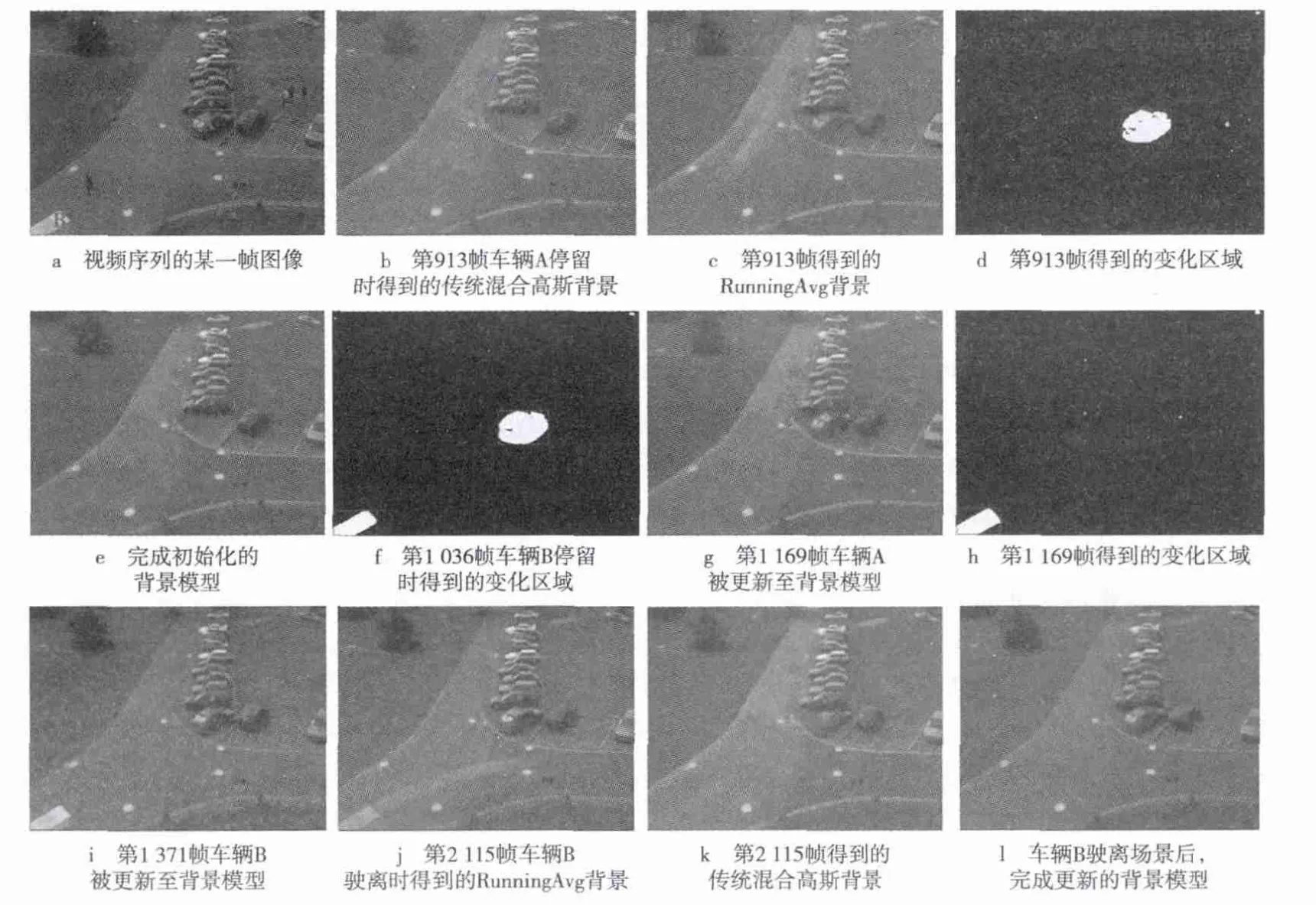
图3 背景模型更新的实验结果图
从图3中可以看出,在背景模型和状态表都完成初始化后,当场景中出现运动物体驶停时,经过较短的时间,本文的算法就可以完成背景模型的更新,如图3g和图3i所示;而传统的混合高斯背景如图3k所示,车辆A只是部分被更新至背景中而已。另外,当场景中出现运动物体先停留一段时间后又驶离背景的情况(如车辆B),那么传统的混合高斯背景中并未记录到车辆B的状态变化信息;本文建立的背景模型可以记录到车辆B的状态变化信息并及时地完成背景更新,如图3i和图3l所示。
4 结束语
本文所建立的背景模型能够对场景的突然变化有快速准确的反应能力,对于非背景变化区域也可以拥有混合高斯模型稳定可靠的背景。实验结果表明,本文提出的方法不仅能够及时准确地更新背景变化区域,同时也避免了拖影现象带来的影响,而且在状态表中可以详细记录背景变化区域的变化信息,方便后续的研究。本文的方法可以应用于车辆停车检测和抛洒物检测等交通事件检测领域。
:
[1]杨宁,杨敏.基于改进的混合高斯模型的运动目标提取[J].计算机技术与发展,2012,22(7):20-23.
[2]薛茹,宋焕生,张环.基于像素的背景建模方法综述[J].电视技术,2012,36(13):39-47.
[3] CUCCHIARA R,GRANA C,PICCARDI M,et al.Detecting moving objects,ghosts and shadows in video streams[J].Pattern Analysis and Machine Intelligence,2003,25(10):1337-1342.
[4]孙永生,刘大健,秦蒙.多幅图像中值法在滤除噪声中的应用[J].电视技术,2012,36(23):15-17.
[5] KASHANI H B.Background estimation in kernel space[J].International Journal of Pattern Recognition and Artificial Intelligence,2011,25(1):1-35.
[6] ZHENG Yi,FAN Liangzhong.Moving object detection based on running average background and temporal difference[C]//Proc.International Conference on Intelligent Systems and Knowledge Engineering(ISKE).Hangzhou:IEEE Press,2010:270-272.
[7] KIM K,CHALIDABHONGSE T H,HARWOOD D,et al.Real-time foreground-background segmentation using codebook model[J].Special Issue on Video Object Processing,2005,11(3):172-185.
[8] MCFARLANE N J B,SCHOELD C P.Segmentation and tracking of piglets in image[J].Machine Vision and Applications,1995,8(3):187-193.
[9] MORDE A,MA X,GULER S.Learning a background model for change detection[C]//Proc.IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops(CVPR Workshops).[S.l.]:IEEE Press,2012:15-20.
[10]刘鑫,刘辉,强振平,等.混合高斯模型和帧间差分相融合的自适应背景模型[J].中国图象图形学报,2008,13(4):729-734.
[11]付荣.视频运动目标检测中背景提取算法的研究[D].西安:西安电子科技大学,2011.
[12]史忠科,曹力.交通图像检测与分析[M].北京:科学出版社,2007:24-33.
[13]张伟,何金国.Hu不变矩的构造与推广[J].计算机应用,2010,30(9):2449-2452.
[14] HUANG Zhihu,LENG Jinsong.Analysis of Hu’s moment invariants on image scaling and rotation[C]//Proc.2010 2nd International Conference on Computer Engineering and Technology.Chengdu:IEEE Press,2010:476-480.
[15]丁磊,宫宁生.基于改进的三帧差分法运动目标检测[J].电视技术,2013,37(1):151-153.
猜你喜欢
汽车工程师(2021年12期)2022-01-17
当代陕西(2020年14期)2021-01-08
中学生数理化·高一版(2020年1期)2020-02-20
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
中学生数理化·八年级物理人教版(2018年10期)2018-12-06
贵州师范学院学报(2016年4期)2016-12-01
电影故事(2015年16期)2015-07-14
科普童话·百科探秘(2015年4期)2015-05-14
智慧与创想(2013年3期)2013-05-09