一种改进的非锐化掩模深度图像增强算法
2014-09-21 01:38戴树岭
哈尔滨工业大学学报 2014年8期
冯 策,戴树岭
(北京航空航天大学自动化与电气工程学院,100191北京)
深度图像的获取是机器视觉中的重要步骤,三维重建、碰撞检测、增强现实、模式识别等都依赖于对深度图像的分析.由于深度信息独立于光照以及物体表面的光反射特性,与传统的图像相比,深度图像不受光照改变以及阴影的影响,因此,深度图像更容易表现物体的特征,适用于提升机器视觉任务的可靠性和实时性.
深度图像通常由双目相机,阵列相机以及深度相机[1]进行采集,然而由于采集设备获取的深度图质量不高,通常存在图像缺失,分辨率低,以及噪声严重等问题,制约了深度信息在工业上的应用.所以如何来改善深度图的质量是本文所要研究的内容.
1 问题分析
由传感器获取的深度信息主要存在以下两方面问题:由于摄像头精度问题所固有的误差和光噪声;由于在物体边缘处存在深度不连续性,导致在对象的边界处会出现许多空洞,即深度缺失.
近些年,研究人员在深度图像质量优化方面做出了许多工作.在深度图降噪方面,文献[2]改进了自适应核回归算法,对深度图像进行了降噪的同时保持了细节,但是没有修复缺失,并且计算复杂度较高.文献[3]采用了三边滤波法进行降噪处理,并在时域上增强了图像细节,但预处理流程复杂,需要对图像进行分割以及前景提取等.在深度图修复缺失方面,文献[4]分别采用两种尺寸的窗体对深度图像进行中值滤波,大尺寸窗体用来填充缺失,小窗体用来平滑噪声,但是算法没有解决边缘毛糙的问题.文献[5]提出了时域滤波深度图修复增强算法,但是这种方法复杂度高,也不适用于修复单幅的深度图像.文献[6]在硬件方面作了创新,提出了结合深度相机与双目相机方式来修复深度图像,但是系统过于庞大,不易于实现.
这里针对传统修复算法存在的问题提出了深度图增强的分析方法:1)结合空间滤波算法与空间图像增强算法来提高图像质量,目的是滤除噪声同时增强被模糊的细节部分;2)深度图像的缺失通常存在于边缘部分以及深色部分,利用深度图对应的彩色图像相关性填补图像中缺失的部分.根据以上分析,本文改进了经典的非锐化掩模算法[7],并结合了联合双边滤波法,构造出了自适应的深度图像增强的算法,既可以填补缺失,平滑噪声,又可以保持细节的清晰.
2 自适应的非锐化掩模深度图像增强算法
2.1 改进的非锐化掩模算法
如图1所示,经典的非锐化掩模是将图像的高频部分与原图像叠加的增强过程,如下式所示,高频部分是通过原图像与图像的低频部分作差得到的.通常深度图像包含3种类型的区域:边缘区域、平坦区域和细节区域,对应图2、3中的标号1、2、3部分,其中细节区域和边缘区域包含图像的重要信息,图像增强的主要目的是对这两类区域作适当的增强,同时尽量避免放大图像噪声.

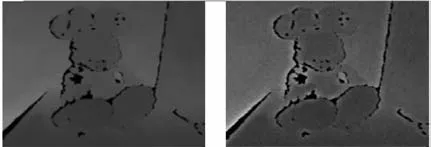
图1 非锐化掩模算法
其中:Di为待处理的深度图,Do为增强后的深度图像为原图像高斯滤波的过程,ΔDi为得到的图像高频部分,λ为增强部分的权重因子.
非锐化掩模算法非常适用于深度图像的增强,原因如下:1)深度图和彩色图不同,彩色图像中存在高光和阴影等不希望增强的部分,而这些部分在深度图像中是不存在的;2)非锐化掩模的高频掩模部分,通常一侧是光晕,另一侧是阴影,如图4中的掩模ΔDi所示,主要适用于不同层次物体间的边缘以及细节区域的增强,而深度图像中高对比度的部分主要是边缘区域和细节区域.2006年Luft等[8]利用深度图的高频部分叠加到彩色纹理上,进而增强彩色图像的边缘以及细节部分.
经典的非锐化掩模算法的缺点是会导致平坦区域高频噪声的放大,如图1所示,本文思想是结合保边的滤波算法,克服经典方法的缺点,修复图像的同时增强图像细节以及边缘部分.
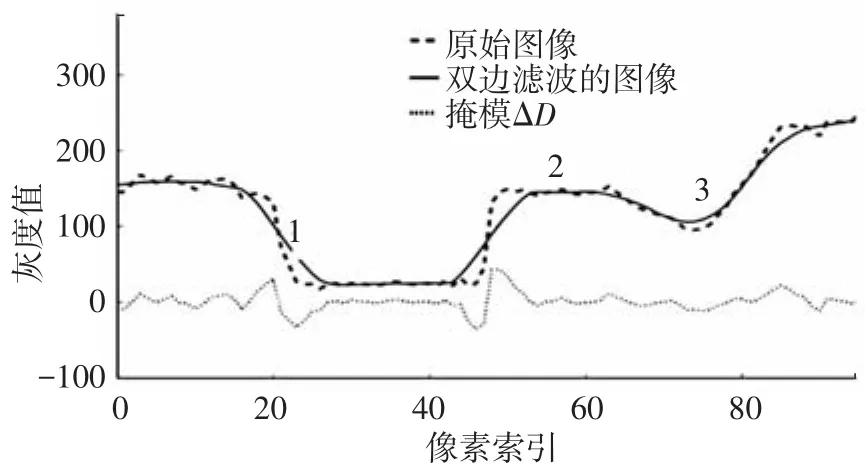
图2 高斯滤波掩模
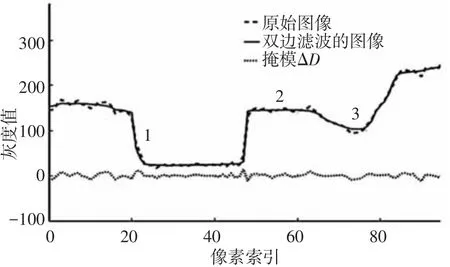
图3 双边滤波掩模
从图2中可见,ΔD是原图像与高斯模糊图像作差所得到的高频部分,图2中标号2位置对应的ΔD是高频噪声,而这一高频部分是图像增强中所不需要的,因此如何滤除平坦区域的高频噪声,修补缺失,增强细节以及边缘区域部分是本文所追求的目标.根据需求本文联想到了保持边缘的滤波算法:双边滤波法.
经典的高斯滤波是利用局部加权平均的思想,但是平滑了图像的同时,也模糊了图像的边缘.为了保持图像边缘信息,Tomasi等提出了双边滤波算法[9],不仅考虑了距离权重,也考虑到了像素灰度相似性,其中与中心像素相似的邻域像素的权重较大,即加权平均的贡献较大;而非相似的邻域像素则权重很小,几乎不参与加权平均,因此双边滤波这种特性很好地保持了图像边缘,即高频部分,模型如下式所示.

其中:Ⅰ为输出图像,Ⅰi为输入图像,wr为灰度相似度权重因子,ws为几何相似度的权重因子,权重函数为高斯分布函数.
从图3中可见,本文将双边滤波法应用到了一维图像上,并与原图像作差,仅得到平坦区域的高频噪声,而边缘区域的高频部分ΔD趋近于0.对比图2与图3,平坦区域ΔD基本相同,由此可知,如果参数设置适当,双边滤波法和高斯滤波法在平坦区域的滤波效果相似,因此可以利用这个特点对传统非锐化掩模算法进行改进:将双边滤波法应用到原图像上,平滑原图像平坦区域的高频噪声,再与高斯滤波的低频图像作差,得到了降噪的高频部分ΔD,如图3所示.图4(a)是经典的非锐化掩模算法得到高频部分ΔD,图4(b)是本文改进的算法得到的高频部分ΔD,可以看出改进算法后得到ΔD中的噪声部分趋近于0,利用去噪的ΔD进行局部掩模计算,这样得到的图像只会增强细节和边缘部分,不会增强噪声部分,有效地克服了经典非锐化掩模放大噪声的缺点.改进后的算法为

其中:Di为待处理的深度图,Do为增强后的深度图像为对图像进行双边滤波的过程,为原图像高斯滤波的过程,ΔDi为得到的像高频部分,λ为增强部分的权重因子.
图5为经典非锐化掩模的算法流程,对应式(1)、(2):待处理图像Di与经过高斯滤波的图像*Di作差得到掩模ΔDi,再将ΔDi乘以权重λ,并叠加到图像Di上,得到增强后的图像Do.
图6为改进后的算法流程,对应式(4)、(5):将经过双边滤波的图像*Di与经过高斯滤波的图像*Di作差得到掩模ΔDi,再将ΔDi乘上权重λ,并叠加到双边滤波的图像*Di上,得到增强后的图像Do.
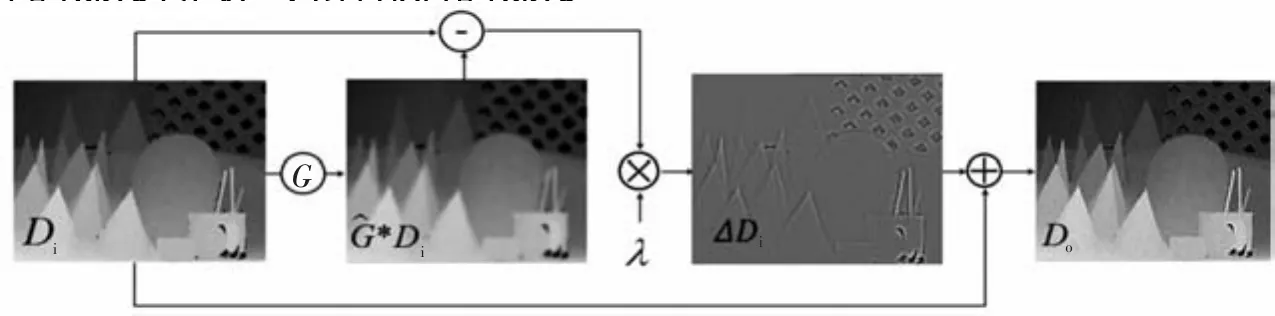
图5 经典的非锐化掩模算法
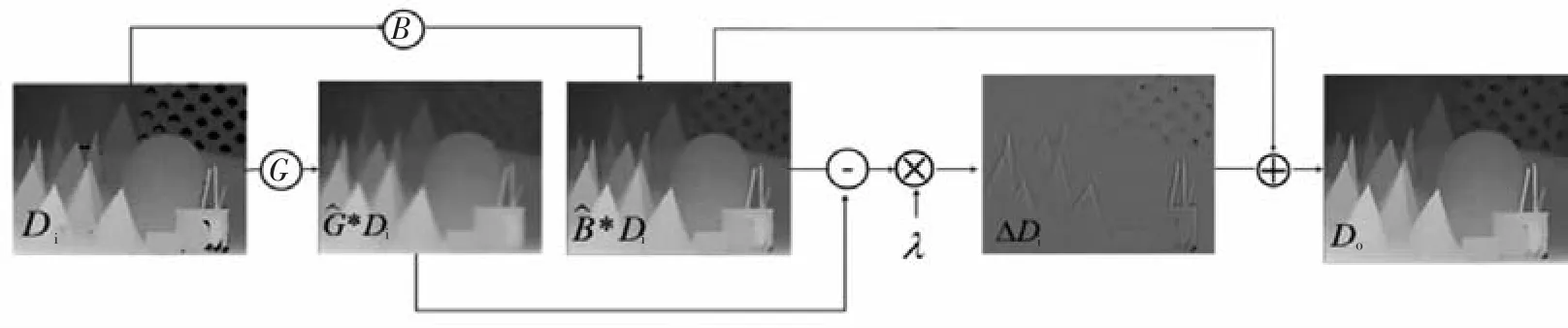
图6 改进后的非锐化掩模算法
2.2 滤波器的改进
本文对式(4)中的双边滤波法的改进目标是保持边缘和细节清晰;填补缺失,平滑噪声.
深度图缺失通常是由于深度不连续性造成的,这部分缺失一般处于边缘位置,传统的图像缺失修复方式是利用窗口内邻域像素加权平均进行填充,但是处于边缘部分的缺失像素,其邻域会分为前景和背景部分,如果利用全部的邻域信息进行填充,会导致待填充像素信息的不准确,即前景和背景的混淆,这样就无法保证边缘以及细节部分的清晰性.
根据以上存在的问题进行分析:1)缺失区域的深度像素对中心像素的填充没有参考价值;2)只有处于同一平面物体的深度信息才有参考价值.根据以上分析,本文改进了增强算法中的滤波法,使其在抑制噪声的同时能够修复深度图像的缺失.本文利用联合双边滤波的思想来解决前后背景像素混淆的问题,联合双边滤波[10]是一种非线性的滤波方法,是在双边滤波法[9]的基础上提出来的,是结合了引导图灰度相似度和空间邻近度的滤波法.本文利用引导图像素间的灰度相关性来判断邻域像素是否有效,即对于中心像素是否具有贡献.邻域像素为有效像素,需要满足两方面的条件:1)不是缺失像素.如果不是缺失像素,其深度值可以作为加权平均的参考值,从实验获取的深度图,以及网上公开测试集中可知缺失像素的灰度值为0,因此本文将缺失阈值设定为0,即Dth=0,判定缺失像素的权重为H(Dq),当Dq>Dth时,此邻域像素不是缺失像素.2)与中心像素的灰度值相近.只有与中心像素处于同一平面的邻域像素才认为是有效的,同平面的标准是利用引导图像中的像素灰度相似性来判断,本文所使用的引导图像是深度图像对应的彩色图像,如下式所示,判定同一平面的权重为wr(Ⅰp,Ⅰq),其中Ⅰp代表在彩色图像中p位置的像素,Ⅰq代表在彩色图像中q位置的像素,wr为高斯函数.
因此写成为
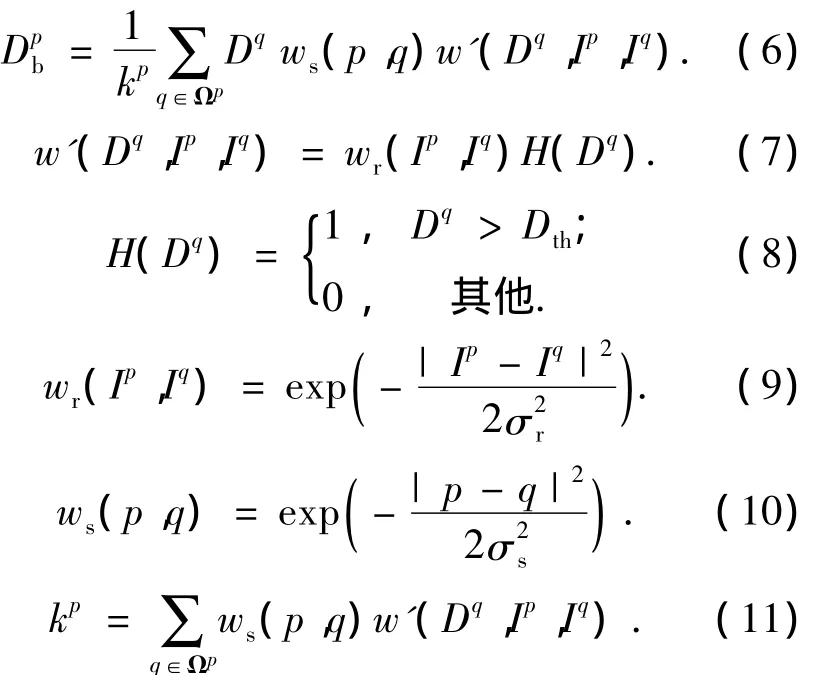
其中:Db为双边滤波后的深度图像,H(Dq)为判断像素是否有效的权重因子,Ⅰ为联合滤波的引导图像,Dth为判断像素是否缺失的阈值,ws(p,q)为距离权重,wr(p,q)为引导图灰度权重.
式(4)中的高斯滤波作用是获取低频信息,不需要保持边缘清晰,因此只需要填补缺失像素为
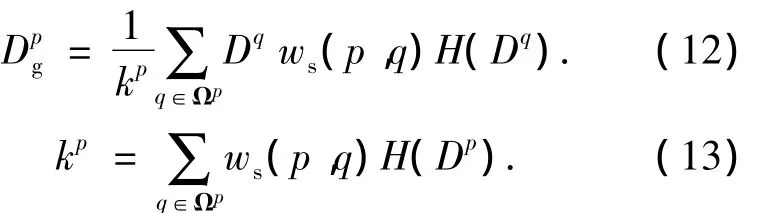
其中:Dg为高斯滤波后的深度图像,H(Dq)为式(8)所示,ws(p,q)为距离权重式(10)所示.
2.3 自适应图像增强
在有效的处理图像的同时,尽可能最大程度的保证原图像深度信息的准确性,避免引入新的深度信息,因此在叠加高频信息时需要对权重因子作适当优化.
自适应深度图像增强的目标:1)削弱叠加到高对比度(边缘)处的高频部分,避免过冲现象.2)重点增强低对比度的细节区域.
通过对高频部分|ΔD|观察,处于边缘处的|ΔD|值较大,一些细小几何结构变化部分的|ΔD|值较小,处于平坦区域的|ΔD|值接近于0,如图3所示.根据以上特点进行分析,本文改进了权重值λ,用自适应的参数替代了传统权重值λ.

因此λ·ΔD转化为

函数中的m为阈值,由图7可见,当|ΔD|高于m被削弱,即λ小于1,这样减弱叠加到高对比度处的高频部分ΔD,避免增强过度的情况;当|ΔD|低于m时被增强,即λ大于1,这样重点增强了低对比度的部分,弥补了传统滤波器会导致细节模糊的不足.参数E控制了削弱增强的程度.
对于阈值m的选取,对一组图片进行测试,当λ=1时,归一化后的|ΔD|为0.032 5时的图像会出现过冲效果,因此本文选取m值为0.032 5,函数曲线如图8所示.通过实验效果和曲线两方面进行比较,E=-3时效果最为理想.从曲线中可以看出,当E=-4时λ·ΔD超过了0.032 5,而E=-2时高对比度部分增强过度.

图7 自适应权重λ曲线图

图8 λ·|ΔD|曲线图
图9为不同λ叠加效果,由图9(c)的图片可见,|ΔD|>0的部分是非平坦区域,包括边缘和细节变化区域:ΔD<0是边缘内侧部分,用ΔD-表示,ΔD>0是边缘外侧部分,用ΔD+表示,当ΔD<0时叠加后的边缘内侧会呈现光晕状,ΔD>0边缘外侧会呈现出阴影状.由于光晕出现在边缘内侧,即相对的前景物体上,如果光晕范围过大或者过强会影响前景物体深度信息的准确性.
如图9(a)所示,方框内脚部边缘的光晕过强.因此ΔD-部分要弱于ΔD+部分,本文改进了式(5),对于不同ΔD使用不同的权重因子来增强,即
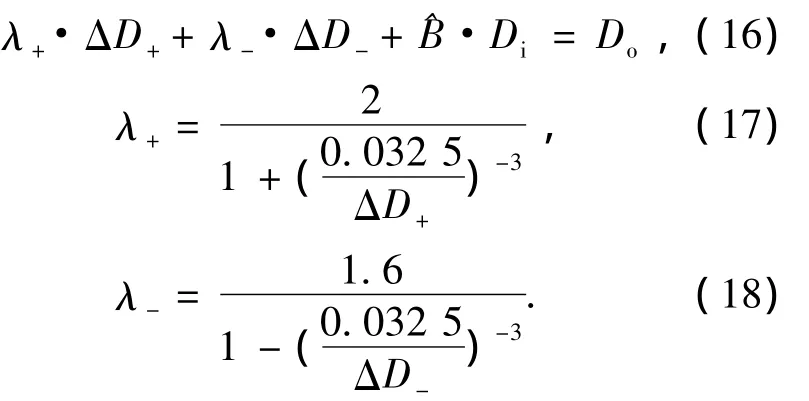
其中:Di为待处理的深度图,Do为增强后的深度图像,*Di为原图像双边滤波的过程,λ+和λ-分别为ΔD+和ΔD-高频部分的权重因子.
图9的4幅图展示了是不同权重下的深度图像增强效果.其中9(a)、9(c)、9(d)是 λ+与 λ-相同时的增强效果,而9(b)是λ+与λ-不同时的增强效果,对比可见9(b)的效果较为理想.

图9 不同λ叠加效果
3 实验结果
采用本文所提出的方法对一组kinect采集的深度图像[11]进行处理,如图10所示.针对640×480分辨率的深度图像,当滤波窗口大小为15×15,灰度权重的标准差σr为0.1,距离权重的标准差σs=5时的实验效果比较理想.图10中将本文的算法结果与修复缺失的双边滤波法结果进行比较,从放大的细节区域可以看到,本文算法对于细节部分给予了很好的增强.

图10 实验结果
由图10中细节放大部分可见,宠物的毛绒边缘增强效果比较理想;其中第5行图片中,玩偶帽沿的边缘部分以及鼻子细节部分增强效果也较明显.
4 结论
1)提出了改进的非锐化掩模深度图像增强算法,利用联合双边滤波法对图像的高频信息进行提取,克服了传统方法放大高频噪声的缺点,增强了深度图像边缘以及细节的部分.
2)采用了深度信息对应的彩色图作为引导图,修复了深度图像的缺失,改善了深度图像的质量.
3)在一组低质量的深度图像上测试了该算法,图像质量提升效果明显.但是算法缺点是在修复较大缺失过程中比较耗时,滤波窗口的尺寸不满足实时性的需求.由于该算法满足并行计算的要求,因此下一步计划在GPU上实现该算法,并尝试采用引导滤波法[12]来提升效率.
[1]FOIX S,ALENYA G,TORRAS C.Lock-in time-off light(ToF)cameras:a survey[J].Sensors Journal,IEEE,2011,11(9):1917-1926.
[2]KIM S Y,CHO W,KOSCHAN A,et al.Depth map enhancementusing adaptive steering kernel regression based on distance transform[J].Lecture Notes in Computer Science,2011,6938:291-300.
[3]KIM S Y,CHO J H,KOSCHAN A,et al.Spatial and temporal enhancement of depth images captured by a time-of-light depth sensor[C]//20th International Conference on Pattern Recognition(ICPR).Istanbul:IEEE,2010:2358-2361.
[4]MAIMONE A,FUCHS H.Encumbrance-free telepresence system with real-time 3d capture and display using commodity depth cameras[C]//10th IEEE International Symposium in Mixed and Augmented Reality(ISMAR).Basel,Switzerland:IEEE,2011:137-146.
[5]MATYUNIN S,VATOLIN D,BERDNIKOV Y,et al.Temporal filtering for depth maps generated by kinect depth camera[C]//3DTV Conference:The True Vision-Capture,Transmission and Display of 3D Video(3DTV-CON).Antalya,Turkey:IEEE,2011:1-4.
[6]KIM S Y,LEEE K,HO Y S.Generation of roi enhanced depth maps using stereoscopic cameras and a depth camera[J].IEEE Transactions on Broadcasting,2008,54:732-740.
[7]LEU J G.Edge sharpening through ramp width reduction[J].Image and Vision Computing,2000,18(6/7):501-514.
[8]LUFT T, COLDITZ C,DEUSSEN O.Image enhancement by unsharp masking the depth buffer[J].ACM Transactions on Graphics,2006,25(3):1206-1213.
[9]TOMASI C,MANDUCHI R.Bilateral filtering for gray and color images[C]//International Conference on Computer Vision(ICCV).Bombay:IEEE,1998:839.
[10]PETSCHNIGG G,SZELISKI R,AGRAWALA M.Digital photography with flash and no-flash image pairs[J].ACM Transactions on Graphics,2004,23(3):664-672.
[11]LAI K, BO L, REN X, et al.A large-scale hierarchical multi-view RGB-Dobject dataset[C]//2011 IEEE International Conference on Robotics and Automation(ICRA).Shanghai:IEEE,2011:1817-1824.
[12]HE K,SUN J,TANG X.Guided image filtering[M].Heidelberg,Berlin:Springer,2010:1-14.
猜你喜欢
上海师范大学学报·自然科学版(2021年4期)2021-09-23
计算机应用(2019年3期)2019-07-31
传感器与微系统(2019年7期)2019-06-25
自然资源遥感(2017年2期)2017-04-27
通信产业报(2016年44期)2017-03-13
软件导刊(2016年9期)2016-11-07
光学精密工程(2016年3期)2016-11-07
科技视界(2016年2期)2016-03-30
吉林大学学报(理学版)(2013年5期)2013-12-03
雕塑(1999年2期)1999-06-28