摆杆式送料机构设计
2014-09-26 01:14平海涛姬鹏飞
安阳工学院学报 2014年4期
平海涛,姬鹏飞
(1.高平集团有限公司,河南平顶山467001;2.安阳职业技术学院,河南安阳455000)
组合机床自动线是一种专用高效自动化技术装备,目前,由于它仍是大批量机械产品实现高效、高质量和经济性生产的关键装备,因而被广泛应用于汽车、拖拉机、内燃机和压缩机等许多工业生产领域[1]。其主要组成部分有:多台组合机床、输送线、送料机构、辅助装置等。其中,送料机构作为自动线重要的组成部分,对整条生产线的效率和可靠性有很大影响。
本文介绍的是应用于成都成工项目的摆杆式送料机构。其主要功能是将工件从流水线运送至机床夹具位置,并在加工完了后将工件从机床搬运回流水线。设计难度在于:
1)工件为类回转体,重量较大,无法使用机械手等常规方法送料。
2)送料机构操作空间小,容易与机床、流水等运动干涉。为避免干涉,机构运动过程较复杂。
3)送料机构必须运动平稳,动作准确。要求工件被搬运至夹具内时基本不需调整即可夹紧。
经过方案论证,该送料机构采用了机构叠加组合的创新方法,模拟人力搬运工件的过程与动作。
1 机构的总体设计方案
机构叠加组合是在一个基本机构的可动构件上安装一个以上基本机构的组合方式。支撑其他机构的基本机构为基础机构;安装在基础机构可动构件上的基本机构成为附加机构。[2]
如图1所示,该送料机构由三个机构叠加而成。分别为水平运动机构、升降运动机构、和摆杆机构。
水平运动机构为基础机构,升降运动机构、和摆杆机构跟随其水平运动。其使用直线导轨导向和支撑,使用液压缸驱动支撑板1(活动构件)水平运动。升降机构安装在支撑板1上。使用导柱导套来导向和支撑,使用液压缸驱动支撑板2(活动构件)升降运动。摆杆机构安装在支撑板2上。摆杆机构采用平行四边形连杆机构。在连杆上固定V型块实现搬运过程中工件的定位。
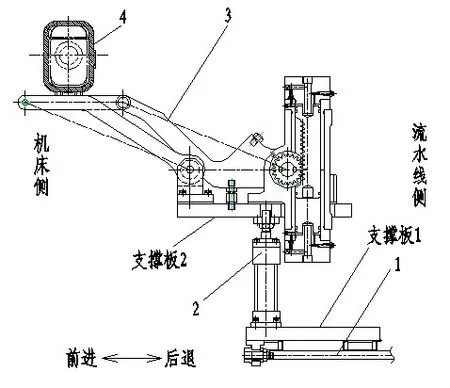
图1 摆杆式送料机构简图
2 机构的动作循环
工件到达流水线的预定位置时,按下启动开关,送料机构执行一系列动作,将工件从流水线搬运到夹具(位于机床工作台)上。为不影响加工,送料机构完成送料后需返回至原来位置。
该工序加工完了后,控制系统发出指令,夹具松开,送料机构执行动作,将工件从夹具搬运到流水线上。为不影响流水线运行,工件搬运到流水线后送料机构需离开流水线一定距离。
动作循环如图2所示。
3 摆杆机构的设计与计算
摆杆机构是送料机构设计的重点。其原理是平行四边形连杆机构,如图3所示。机架1为支撑板2,连架杆4为原动件,连杆3为执行构件,工件放置在其上。根据平行四边形原理,中间连杆在运动过程中始终与机架保持平行,这样就保证了搬运的稳定性。
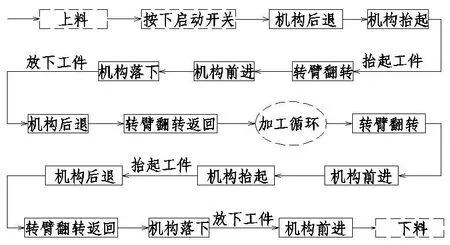
图2 动作循环图
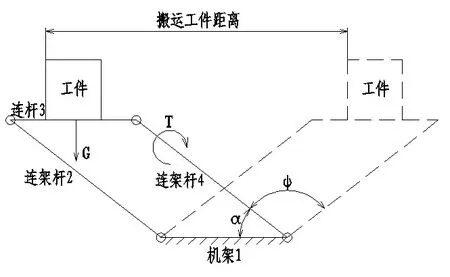
图3 摆杆机构原理图
图示连架杆4与水平夹角为α位置,此为摆杆机构的左极限位置。当连架杆4顺时针旋转角度ψ,此为摆杆机构的右极限位置。此时工件水平方向被搬运了一段距离。同时,为保证两极限位置工件的高度不变,必须满足ψ=180°-2α。
摆杆机构使用液压驱动,齿轮齿条啮合传递扭矩,其原理如图4所示。壳体固定在支撑板上,壳体内安装有衬套。液压系统的进出油口设置在壳体两端的端盖处。在压力油作用下,齿条轴可以上下移动,驱动齿轮正反转动,进而带动连架杆4(即原动件)顺时针及逆时针方向旋转。
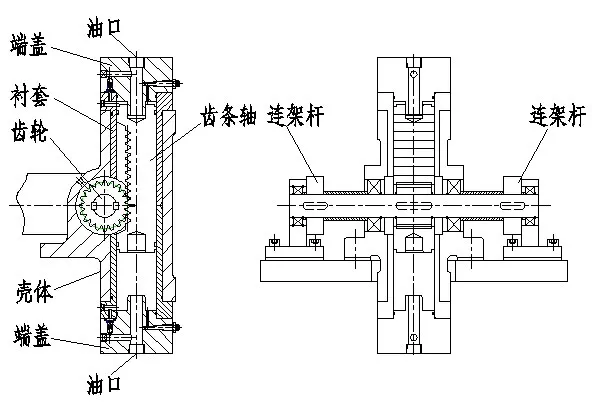
图4 机构驱动原理示意图
齿条轴直径的确定是摆杆机构设计重点。如图3所示,忽略杆件本身重量及摩擦力的影响,摆杆机构外加载荷仅工件重量G以及通过齿轮传递的扭矩T。由于在搬运工件过程中机构运动缓慢,可忽略构件本身惯性力的影响,对机构力学分析可得扭矩T=GLcosα(L为连架杆4的长度)。作用在齿条轴上所需要的驱动力F=2T/D(D为齿轮的直径)。根据驱动力F以及油压的设定值p,最终可以确定齿条轴的直径尺寸。
4 结论
该摆杆式送料机构使用机构叠加组合的创新方法,具有多自由度的运动,可以准确、平稳地实现工件在流水线与机床间的运送,具有较高的重复定位精度和可靠性,且有效解决了工件形状不规则难于运送,以及工况复杂机构间容易干涉等难题。该送料机构已交付使用,运行良好,取得了良好的经济效益。
[1]李如松.组合机床和自动线的技术发展[J].组合机床与自动化加工技术,1999(1).
[2]陈亚琴.机构叠加组合与创新设计[J].机械设计与研究.2001(04).
猜你喜欢
小学科学(学生版)(2020年2期)2020-03-03
水运工程(2020年2期)2020-02-26
塑料包装(2019年6期)2020-01-15
电子技术与软件工程(2019年18期)2019-11-18
物流技术与应用(2019年6期)2019-07-16
设备管理与维修(2019年14期)2019-06-16
现代机械(2018年5期)2018-11-13
重型机械(2016年1期)2016-03-01
中国资源综合利用(2016年9期)2016-01-22
福建人(2015年10期)2015-02-27