
波浪能直接驱动机动浮标的推进机构设计*
2014-10-16 07:22常宗瑜常东辉郑中强
中国海洋大学学报(自然科学版) 2014年4期
常宗瑜,戴 源,常东辉,郑中强
(1.中国海洋大学工程学院,山东 青岛266100;2.山东烟台利达木工机械有限公司,山东 烟台264100)
海洋生态环境监测技术和设备是《国家中长期科学和技术发展规划纲要(2006—2020)》指出的海洋研究的重点领域和优先主题,浮标、潜标及水下移动平台、水面调查船、海底观测站以及卫星和航空遥感组成了立体海洋观测系统,可以获取的大范围、全天候、连续和长时间的序列的海洋观测资料。
在各类立体海洋观测系统中,浮标系统是重要的海洋环境观测装备,具有在恶劣的海洋环境下,长时间全天候、连续、自动地对海洋气象、水文环境进行观测等优点,是海洋观测岸基站、调查船和调查飞机在空间和时间上的拓展,具有其他调查方法无法替代的优点,在海洋观测中发挥着巨大的作用。但是浮标布放之后只能在固定站位开展观测,得到站位附近的海洋观测要素,重新定位布放需要船只、人员大量消耗。建立自主控制的移动海洋监测平台是海洋学家深入研究海洋环境的迫切需求,最近国外研究机构和学者提出了机动海洋浮标的概念。文献[1]开发了一种用于河流和浅海的机动浮标 Autonomous Surface Mobile Vehicle(ASMV),它可以监测给定的位置和路径的海洋环境,并可以根据指令自主解锚和锚定,如图1(a)所示;文献[2]开发了一种海洋机动浮标 OASIS(Ocean Atmosphere Sensor Integration System),具有监测海-气界面通量、赤藻发生及其他气象和水文资料的功能,如图1(b)所示;文献[3]开发的Scout浮标可以通过螺旋桨和导航控制实现给定站点的环境监测任务,如图1(c)所示;文献[4]提出了一种可以追踪溢油的机动浮标(Spilled Oil Tracking Autonomous Buoy),如图1(d)。此外还有已广泛应用的ROV和AUV等。这些非漂浮的机动浮标都需要自带能源供应,能量供给的限制大大阻碍了移动监测平台在长时间大范围内的监测活动。
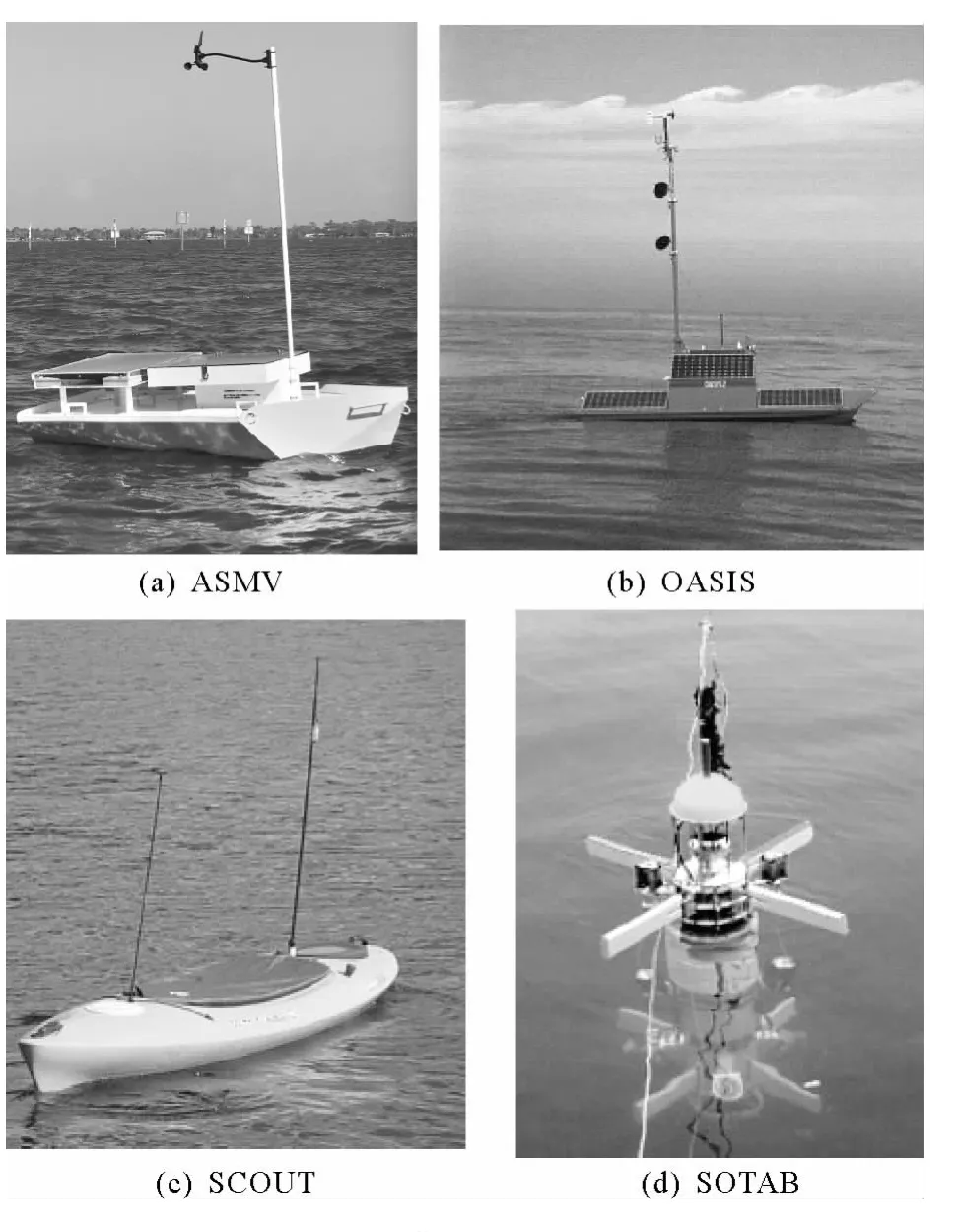
图1 典型机动浮标Fig.1 The typical mobile buoy
本文提出了一种能够利用波浪能驱动的机动浮标,它可以利用波浪的升沉振荡转化为向前运动。文中介绍了该浮标的工作原理,给出了该机构的设计方案和样机,并对该浮标进行了海上试验,试验表明该机构可以顺利在波浪作用下前进。
1 基本原理
海洋中的波浪经久不息地做着起伏运动,海水中的每个水质点的运动主要以垂荡运动为主,辅以小幅度的水平运动,而且随着深度的增加波浪的振动情况会大大减少,波浪水质点的运动以及与水深的关系如图2所示。

图2 波浪质点的运动Fig.2 The motion of the wave particle
本文叙述的机动浮标就是利用了海洋表面的波浪垂荡运动来作为推动机动浮标的动力,其工作机理如图3所示。从图上可以看到,当机动浮标处于静水中时,水下推进装置处于水平状态,图3(a)所示,当水面浮体在波浪的作用下向上移动的时候,叶片顺时针旋转,相对水流垂直向下作用在叶片上,分解为垂直于叶片的法向力和沿着叶片的切向力,其中法向力就会产生推动叶片向前移动的一个推力,如图3(b)所示。
同样道理,当水面浮体在波浪作用下向下运动时,叶片逆时针转动,水流作用下垂直向上作用在叶片上,分解为向上的法向力和沿着叶片的切向力,同样法向力也会产生推动叶片向前移动的推力,如图3(c)所示。
这种情况类似于在飞行过程机翼所产生的升力,只不过机动浮标中速度方向为垂直方向,而产生的升力是水平向上。
由此,通过机构的巧妙设计实现了无论在波浪推动浮标上下运动时都能产生向前的推动力,实现了对载体的无动力、全静音驱动。而且从波浪驱动机动浮标的原理可以看出,随着波浪振荡幅值的增加,水上浮体拉动水下推进装置的幅度增加,推进的速度进一步加快,因此在高海况条件下,不仅不会影响机动浮标的使用,而且会令机动浮标有更快的速度。
2 波浪驱动机动浮标的设计
根据上述波浪驱动机动浮标运动机理,对波浪驱动浮标进行设计,浮标的示意图如图4所示。其中1为水面浮体,2为水下推进装置,二者之间为连接的缆索3,其中水面浮体上主要构件为浮体和舵板4。

图3 仿生机动浮标的工作原理Fig.3 The principle of bionic mobile buoy

图4 机动浮标总体示意图Fig.4 The sketch map of mobile buoy
水面浮体的尺寸为900mm×600mm×70mm,采用薄钢板包络的泡沫浮体材料。连接上浮体与水下推进机构的绳索长度为4m,水下推进机构总长度大约为800mm。水下推进机构是整个装置的动力源和核心机构。如图5所示,整个水下推进机构由推进机构基体、摆杆、连杆和翼片组成,10片翼片连接在10个摆杆的连接体处,对称分布在基体的两端,摆杆和连杆组成平行四边形机构,保证五组翼板同步。翼片尺寸为400 mm×100mm×3mm。除去翼片采用有机玻璃板、浮体外,其他构件均为316不锈钢。叶片组数可以根据结构的复杂程度加以增减。

图5 水下推进装置示意图Fig.5 The sketch map of underwater propulsion device
3 实验研究
根据上述原理和设计图纸,制作了机动浮标的样机,其结构如图6所示。波浪作用在水面浮体上,通过缆索带动水下推进机构叶片的摆动,使整个装置向前缓慢移动,水面浮体的方向舵用于控制机动浮标的行进方向,由计算机远程控制。水面浮体的运动参数和方向舵的转角通过传感器检测通过无线传输给计算机。此外有水下摄像机对水下推进机构叶片的运动进行观测。

图6 波浪能驱动机动浮标系统Fig.6 The system of mobile buoy directly driven by wave
根据上述原理和设计图纸,制作一个小型机动浮标的样机,其各个主要尺寸和材料见表1。
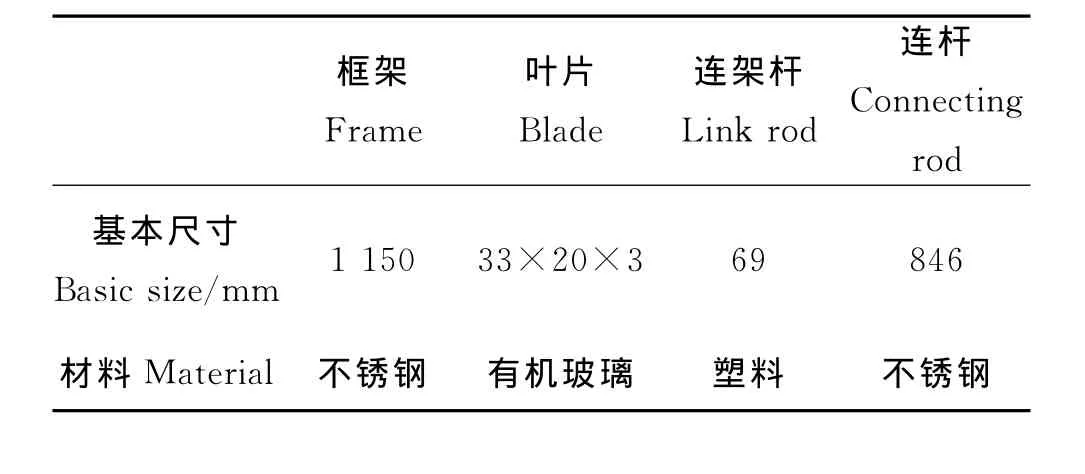
表1 小型机动浮标的样机参数Table 1 The parameter of physical prototype of mobile buoy
制作的水下推进装置实验样机见图7。

图7 水下推进机构Fig.7 The divce of underwater propulsor
利用该实验样机进行了海试。为监测水下推进装置的翼片运动情况,在缆索下端安装水下摄像机。在烟台养马岛水域进行了实验,通过实验发现随着波浪的起伏,机动浮标缓慢向前移动(见图8),通过水下摄像机发现翼片随着波浪做显著摆动。实验初步证明本设计原理和样机是有效的。

图8 仿生推进装置海试图(截图自录像资料)Fig.8 The experiment of underwater propulsion device in sea
4 结语
本文设计了一种新型波浪能驱动的机动浮标,该浮标由水面浮体和水下推进机构两部分组成,水下推进机构可以将波浪垂荡振动转化为前进的动力,本文介绍了该浮标的结构和工作原理,给出了设计方案,并进行了海试,实验结果表明文中设计的机动浮标系统可以在波浪的作用下实现有效的前进运动,辅以远程控制舵板等机构可以实现有控制的巡航。本文提出的机动浮标方案为了开展物理海洋环境、海洋生态、海洋污染的提供一种有效仪器搭载工具。
[1] Orton P M,Gillis W R,Moisan J R,et al.The Mobile Buoy:An Autonomous Surface Vehicle for Integrated Ocean-Atmosphere Studies[C].Washington:American Geophysical Union,Spring Meeting,2009.
[2] Wood S,Rees M,Pfeiffer Z.An Autonomous Self-Mooring Vehicle for Littoral & Coastal Observations[C].Aberdeen:IEEE O-ceans,2007:1-6.
[3] Curcio J,McGillivary P A,Fall K,et al.Self-Positioning Smart Buoys,The “Un-Buoy”Solution:Logistic Considerations using Autonomous Surface Craft Technology and Improved Communications Infrastructure[C].Boston:IEEE Oceans,2006:18-22.
[4] Muneo Yoshie,Yoshitaka Matsuzaki,Isamu Fujita.At-sea Trial Test of an Autonomous Buoy which Tracks Drifting Oil and Observation of In-Situ Data Tracking Drifting Markers on the Sea for Predicting Location of the Spilled Heavy Oil[C].Osaka:Proceedings of the Nineteenth(2009)International Offshore and Polar Engineering Conference,2009.
[5] Antonelli G.Underwater robots:Motion and force control of vehicle manipulator systems[M].Berlin:Springer,2003.
[6] Wang Xiaoming,Shang Jianzhong,Luo Zirong,et al.Reviews of power systems and environmental energy conversion for unmanned underwater vehicles[J].Renewable and sustainable Energy Reviews,2012,43(16):1958-1970.
[7] 常宗瑜.波 浪 驱 动 的 机 动 浮 标: 实 用 新 型 专 利 [P].201220583004.3.
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
垂钓(2022年3期)2022-05-14
长江科学院院报(2022年3期)2022-03-18
垂钓(2022年1期)2022-02-09
舰船电子工程(2021年5期)2021-06-04
舰船科学技术(2021年12期)2021-03-29
哈尔滨工程大学学报(2021年2期)2021-03-16
装备制造技术(2020年4期)2020-12-25
房地产导刊(2020年6期)2020-07-25
垂钓(2019年2期)2019-09-10
