
离心式昆虫微力测试系统设计
2014-10-20 06:40王立新翟利刚
河北科技大学学报 2014年1期
王立新,翟利刚
(河北科技大学机械工程学院,河北石家庄 050018)
机械化滑移捕集治理致灾农业昆虫技术研究过程中[1-2],致使昆虫产生良好滑移效率的捕集滑板的仿生研制是关键因素,猪笼草叶笼滑移区表面因具有特殊结构而对昆虫表现出良好的滑移捕获能力,因此备受学者关注[3-6]。猪笼草叶笼滑移区表面的月骨体与蜡质晶体能够致使绝大多数昆虫的附着系统降低甚至丧失正常的附着能力,这给捕集滑板的仿生研制提供了绝妙的思路[7-8]。仿生研制致灾农业昆虫捕集滑板过程中,需要测试蚂蚁、甲虫、飞蛾等昆虫在仿生原型及制备捕集滑板表面的附着力、摩擦力等毫牛尺度微力,以期为捕集滑板的仿生制备提供理论支持。
目前,文献公开的测力系统采用的基本单元是测力传感器,传感器的量程、分辨率直接决定了测力系统的测量范围与测量精度。专利[9]—专利[10]公开的二维小量程力传感器,能够同时测量水平方向和垂直方向上的力,具有结构简单、弹性体整体刚度高等优点,设置了过载保护结构,安全性和可靠性高;但由于该传感器在法向与切向的分辨力均是9.8mN,比较适合壁虎等体型较大动物脚掌产生的力,对于甲虫、蚂蚁等体型较小昆虫的附着系统所产生的力,该传感器在精度方面未能满足要求。专利[11]—专利[13]公开的三维力传感器,具有结构简单、灵敏度高等优点,能够测量蜘蛛、壁虎等爬行时产生的摩擦力;但该三维力传感器的分辨力为1mN,对于蚂蚁等小型昆虫附着系统产生的力,测试精度仍不能满足要求。利用现有传感器构建的微力测试系统可以实现昆虫附着系统产生毫牛尺度微力的测试[6,14-15],但测力系统的测试平台及附属机械结构过于简单,测试过程易引入人为操作误差,对测试结果的准确性造成影响。
现有的测力系统,在测试量程、测试精度和测试准确性等方面无法同时满足对蚂蚁、甲虫、飞蛾等体型较小昆虫附着力、摩擦力等毫牛尺度微力的测试需求。因此有必要设计一种昆虫微力测试系统,用于测量体型较小昆虫附着系统产生的毫牛尺度的附着力、摩擦力等,以满足机械化滑移捕集治理致灾农业昆虫技术研究过程中对毫牛尺度微力的测试需求。本文主要从测力原理及机械机构方面阐述离心式昆虫微力测试系统的设计,并对设计构建的昆虫微力测试系统进行试验调试,以检验系统的功能。
1 离心式昆虫微力测试系统原理与总体设计方案
1.1 离心式昆虫微力测试系统原理
该离心式昆虫微力测试系统主要依据离心运动原理,即物体在平面上做圆周运动时,物体与平面的附着力(摩擦力)提供所需向心力。将测试材料固定于测试平台表面,把测试对象安置在测试材料上,开启驱动电机使测试平台旋转,测试对象在测试材料表面做圆周运动,测试对象与测试材料之间的附着力(摩擦力)提供测试对象做圆周运动所需向心力。调节电机转速控制器,使电机转速缓慢增加,测试对象做圆周运动所需向心力也不断增大。当转速增大到一定值时,测试对象与测试材料之间的附着力(摩擦力)不足以提供所需向心力时,测试对象脱离测试材料。测试对象临界脱离测试材料时刻的离心力即为其在测试材料的最大附着力(摩擦力)。
假设Ff表示测试对象在测试材料表面产生的最大附着力(摩擦力),单位为N;F表示测试对象临界脱离测试材料表面时所受离心力,单位为N;m表示测试对象的质量,单位为kg;r表示测试对象脱离测试材料时刻的离心运动半径,单位为m;ω表示测试对象脱离测试材料时刻的角速度,单位为rad/s。则有:

将测试对象做圆周运动的角速度换算成电机的转速,式(1)转换为

式中,n表示测试对象脱离测试材料时刻驱动测试平台的电机转速,单位r/min。
1.2 离心式昆虫微力测试系统总体设计方案

图1 离心式昆虫微力测试系统的总体设计方案Fig.1 General design planning of centrifugal insect micro-force measuring system
离心式昆虫微力测试系统的总体设计方案如图1所示,机座是保障该昆虫微力测试系统稳定工作的基础部件,测试平台、调速电机、视频监控系统均固定安装在机座上。调速电机及其转速控制器调节测试平台的旋转速度,便于获取测试对象脱离测试材料时刻的转速信息;视频监控系统摄像头的中心与测试平台中心重合,仅在竖直方向上保持其自由度,用于准确获取测试对象脱离测试材料时刻的半径信息;测试对象的质量可由高精度称重天平获取。由此可获取用于计算测试对象在测试材料表面产生的最大附着力(摩擦力)的参数信息。
2 离心式昆虫微力测试系统机构设计
该离心式微力测试系统的整体结构主要包括测试平台及附属机构、调速电机及转速控制器、视频监控系统、实现各部件固定安装的机座等4部分组成,如图2所示。
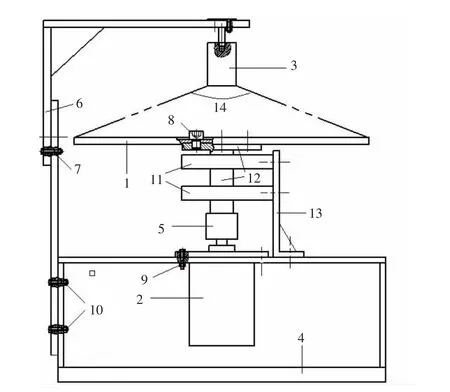
图2 离心式昆虫微力测试系统整体结构Fig.2 General structure of centrifugal insect micro-force measuring system
2.1 测试平台及附属机械机构
测试平台是离心式昆虫微力测试系统的关键部件,不仅为测试材料和测试对象提供安置平台,还影响测试对象做离心运动时半径信息的准确提取。为使测试平台能够保持圆周运动的稳定性,采用质轻、刚性好的铝合金材质作为测试平台加工并将其加工成圆盘形;测试平台上以圆心为起点设定以毫米为最小单位的刻度线,共设定相互垂直的4条刻度线,便于精确获取测试对象在测试平台上的位置信息。
离心式昆虫微力测试系统运行时,测试平台较轻的质量(约2kg)决定其做圆周运动时所需力矩不大,故可直接用联轴器将自制主轴及测试平台连接于调速电机主轴。自制主轴通过调心轴承及轴承座固定安装于连接板上,确保调速电机主轴不承受测试平台、自制主轴、调心轴承及轴承座等部件的重力,以此提高离心式昆虫微力测试系统运行的平稳性及抑制传递误差的产生。
机座为调速电机及转速控制器、测试平台、高帧数视频监控系统等部件的载体,采用合金钢材质,加工成对称的口型结构。调速电机与机座之间垫有橡胶垫,以抑制调速电机运转时产生的振动。
2.2 调速电机及转速控制器
调速电机及转速控制器是离心式昆虫微力测试系统实现微力测量的主要部件,为测试对象的圆周运动提供运转动力及转速信息。离心式昆虫微力测试系统的转速需要满足0~1 000r/min的无级调速,且转速信息实时显示,故选用调速电机61K140RA-CF,其主要性能参数如下:额定功率140W,最高转速1 450r/min,最大转矩为9.2kg·cm。与调速电机匹配的转速控制器可调节调速电机转速并将转速信息在显示窗口实时显示。
2.3 视频监控系统
离心式昆虫微力测试系统运转时,高帧数视频监控系统用于实时监控测试平台的圆周运动情况,便于直观显示测试对象在测试平台的位置信息。结合测试平台上设置的刻度线,可准确获取测试对象做离心运动的半径信息。综合考虑离心式昆虫微力测试系统的运行特性及价格因素,选择Stjiatu ST-39/5CP用于对测试平台运转情况的监控,其主要性能参数如表1所示。调节视频监控系统的摄像头在水平面的位置使其中心线与测试平台的中心线重合,摄像头仅在竖直方向上具有自由度以便于调节摄像头与测试平台之间的距离,保证视频监控系统能够监控测试平台全景。

表1 视频监控系统Stjiatu ST-39/5CP主要性能参数Tab.1 Main performance parameters of video monitoring system Stjiatu ST-39/5CP
3 离心式昆虫微力测试系统运行调试
为检验设计构建的离心式昆虫微力测试系统的运行性能,进行了昆虫附着力的测试。测试昆虫选用蚂蚁(日本弓背蚁,CamponotusjaponicusMary),测试材料选用2000目砂纸,固定在测试平台上。
首先采用高精度称重天平PT-1004/305对蚂蚁进行称重,挑选体型相近的测试蚂蚁N只,放置于质量为M0的容器中,称得蚂蚁与容器的总质量为M,则单只蚂蚁的质量m可由以下公式求得:

多次重复上述测量,获取蚂蚁质量为21.9±6.1mg(n=8)。

图3 测试昆虫脱离测试材料时刻离心运动半径信息计算示意图Fig.3 Sketch utilized for calculating radius information of test insect on test material
将蚂蚁放置于2000目砂纸表面,同时启动调速电机与高帧数视频监控系统,缓慢调节转速控制器使测试平台转速缓慢增加,直到蚂蚁临界脱离2000目砂纸表面,记录此时调速电机转速。利用高帧数视频监控系统保存的视频资料获取蚂蚁脱离2000目砂纸时刻的图像,用此计算做离心运动的蚂蚁脱离2000目砂纸瞬间的半径信息,计算方法如下表述。
如图3所示,A点为做离心运动的测试对象脱离测试材料瞬间所处位置,测试对象距离测试平台圆心处的图像显示距离为r′,测试平台边缘到其中心的图像显示距离以R′表示,r′与R′的图像显示值均可用游标卡尺或千分尺测量打印图像测得。假定A点到测试平台中心的实际距离用r表示,r即为做离心运动的测试昆虫脱离测试材料瞬间的半径信息;假定R表示测试平台的真实值,在设计构建的离心式昆虫微力测试系统中为129.6mm。由公式

获得测试对象脱离测试材料时刻的离心运动半径r,即

获取用于计算测试昆虫脱离测试材料时刻离心力的测试昆虫质量、离心运动半径、离心运动转速等信息,代入离心力计算公式(2)得到蚂蚁在2000目砂纸表面的最大附着力。选用体型相近的蚂蚁,重复测试8次,获取附着力信息,如表2所示。

表2 蚂蚁在2000目砂纸表面的最大附着力Tab.2 Maximum attachment force of ants on 2000#sandpaper
运行调试结果表明设计构建的离心式昆虫微力测试系统能够准确获取用于蚂蚁、甲虫、飞蛾等体型较小昆虫在材料表面的离心运动的转速、半径等信息,进而可计算获取昆虫在材料表面的附着力、摩擦力,能够满足致灾农业昆虫滑移捕集滑板仿生研制过程中对昆虫在材料表面产生的附着力、摩擦力等毫牛尺度微力的测试需求。
4 结 语
基于猪笼草叶笼滑移区表面特殊结构与良好滑移功能仿生研制致灾农业昆虫捕集滑板过程中,需要测试蚂蚁、甲虫、飞蛾等体型较小致灾农业昆虫在仿生原型和制备滑板表面的附着力、摩擦力等毫牛尺度微力,为满足测试需求,设计构建了离心式昆虫微力测试系统,该微力测试系统主要由测试平台及附属机构、调速电机及转速控制器、视频监控系统和能够实现各部件固定安装的机座等部分组成。为检验设计构建的离心式昆虫微力测试系统,以蚂蚁为测试昆虫,测试了其在2000目砂纸表面的附着力,结果表明该系统能够准确获取昆虫在材料表面离心运动转速、半径等信息,进而可计算获取附着力信息。该离心式昆虫微力测试系统能够满足致灾农业昆虫滑移捕集滑板仿生制备过程中对昆虫附着系统产生的毫牛尺度微力的测试需求。
[1] 王立新,周 强,程小桐.蝗虫在滑板表面滑移效应的测试[J].江苏大学学报(自然科学版),2009,30(3):232-235.
WANG Lixin,ZHOU Qiang,CHENG Xiaotong.Sliding effect test of locust on surface of slope plates[J].Journal of Jiangsu University(Natural Science Edition),2009,30(3):232-235.
[2] 王立新,周 强,罗瑞龙,等.蝗虫在滑移捕集滑板上的附着力测试[J].农业机械学报,2010,41(12):195-198.
WANG Lixin,ZHOU Qiang,LUO Ruilong,et al.Attachment force test of locust on slippery trapping plates[J].Transactions of the Chinese Society for Agricultural Machinery,2010,41(12):195-198.
[3] ELLISON A M,GOTELLI N J.Energetics and the evolution of carnivorous plants-Darwin′s most wonderful plants in the world[J].Journal of Experimental Botany,2009,60(1):19-42.
[4] ROBINSON A S,FLEISCHMANN A S,MCPHERSON S R,et al.A spectacular new species ofNepenthesL.(Nepenthaceae)pitcher plant from central Palawan,Philippines[J].Botanical Journal of the Linnean Society,2009,159:195-202.
[5] CHIN L,JONATHAN A M,CHARLES C.Trap geometry in three giant montane pitcher plant species from Borneo is a function of tree shrew body size[J].New Phytologist,2010,186(2):461-470.
[6] WANG Lixin,ZHOU Qiang.Friction force ofLocustLocustamigratoriamanilensis(Orthoptera,Locustidae)on slippery zones surface of pitchers from fourNepenthesspecies[J].Tribology Letters,2011,44(3):345-353.
[7] GORB E V,GORB S N.Physicochemical properties of functional surface in pitchers of the carnivorous plantNepenthesalata blanco(Nepenthaceae)[J].Plant Biology,2006(8):841-848.
[8] WANG Lixin,ZHOU Qiang,ZHENG Yongjun,et al.Composite structure and properties of pitcher surface of carnivorous plantNepenthesand its influence on insect attachment system[J].Progress in Natural Science,2009,19(12):1657-1664.
[9] 于 敏,倪 杰,戴振东,等.二维小量程力传感器[P].中国专利:1760662A,2006-04-19.
YU Min,NI Jie,DAI Zhendong,et al.2-D Low-range Force Sensor[P].CN:1760662A,2006-04-19.
[10] 戴振东,文智平,吉爱红.二维小量程力传感器[P].中国专利:101131335,2008-02-27.
DAI Zhendong,WEN Zhiping,JI Aihong.2-D Low-range Force Sensor[P].CN:101131335,2008-02-27.
[11] 吉爱红,张正杰,戴振东.量程为0~1.5N的三维力传感器[P].中国专利:100412521C,2008-08-20.
JI Aihong,ZHANG Zhengjie,DAI Zhendong.3-D Force Sensor with 0~1.5NRange[P].CN:100412521C,2008-08-20.
[12] 吉爱红,张正杰,戴振东.三维小量程力传感器[P].中国专利:1912559,2007-02-14.
JI Aihong,ZHANG Zhengjie,DAI Zhendong.3-D Low-range Force Sensor[P].CN:1912559,2007-02-14.
[13] 王卫英,王 军,李 伟.三维小量程力传感器[P].中国专利:201242478,2009-05-20.
WANG Weiying,WANG Jun,LI Wei.3-D Low-range Force Sensor[P].CN:201242478,2009-05-20.
[14] 王立新,周 强.基于猪笼草叶笼滑移区仿生的蝗虫滑移捕集滑板功效测试[J].农业机械学报,2011,42(5):222-225.
WANG Lixin,ZHOU Qiang.Function testing of locust slippery plate manufactured based on waxy zone ofNepenthespitchers[J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(5):222-225.
[15] WANG Lixin,ZHOU Qiang,XU Shuyan.Role of claws and pads inLocustLocustamigratoriamanilensisattaching to substrates[J].Chinese Science Bulletin,2011,56:789-795.
猜你喜欢
玩具世界(2022年3期)2022-09-20
上海涂料(2021年5期)2022-01-15
上海涂料(2021年5期)2022-01-15
甘肃教育(2020年2期)2020-09-11
上海节能(2020年3期)2020-04-13
山东冶金(2019年6期)2020-01-06
石油化工建设(2019年4期)2019-10-10
上海包装(2019年4期)2019-08-30
小学生优秀作文(低年级)(2018年9期)2018-09-10
小学生必读(低年级版)(2018年11期)2018-03-13
