一种高精度捷联惯组方位引出方法
2014-10-21 01:08天津航海仪器研究所天津300131中国宇航系统工程研究所北京100076
中国惯性技术学报 2014年6期
(1. 天津航海仪器研究所,天津 300131;2. 中国宇航系统工程研究所,北京 100076)
(1. 天津航海仪器研究所,天津 300131;2. 中国宇航系统工程研究所,北京 100076)
设计了捷联惯组方位基准镜安装误差的标定方法,实现了高精度的方位引出。首先,把捷联惯组固定在标准六面体内,在高精度转台上进行捷联惯组的参数标定,使捷联惯组导航坐标系与标准六面体一致;然后,在有L形靠面的水平大理石平板上,借助实验室内高精度的北向方位基准,使用经纬仪对平面镜与标准六面体之间的安装误差进行标定。通过坐标系间姿态矩阵转换,修正安装误差后,平面镜成为方位基准镜,从而实现捷联惯组的方位角引出,其均方误差不大于3″。
捷联惯组;方位引出;高精度转台;标准六面体;标定
在实际应用中,捷联惯组的方位基准通常采用一定的技术手段来引出,便于方位传递或瞄准。随着捷联惯组姿态精度的提高,其方位姿态引出精度也越来越高,如某型弹上捷联惯组的方位姿态瞄准精度要精确到角秒级。这就对方位基准引出和标定的精度提出了更严格的要求。
本文提出了一种高精度捷联惯组方位引出方法:把一块平面镜,固定在捷联惯组的方位引出面上,作为方位基准。通过标定方位基准与捷联惯组的安装误差,实现捷联惯组高精度方位引出。对方位基准镜与捷联惯组之间的姿态变换关系进行了研究,得出了一种有效的方位基准镜安装误差标定方法,实现了捷联惯组高精度的方位引出。
1 方位引出方案
首先,用过渡板把捷联惯组固定在标准六面体内,在高精度转台上按照经典 24位置方法进行捷联惯组的参数标定,使捷联惯组导航坐标系与标准六面体一致;然后,在有L形靠面的水平大理石平板上,借助实验室内高精度的北向方位基准,使用电子经纬仪对进行方位引出基准——平面镜与标准六面体之间的安装误差的标定。完成这两步标定后,去掉标准六面体,修正安装误差后,平面镜的法线代表了捷联惯组的方位,从而实现捷联惯组高精度的方位引出。
1.1 方位引出误差
采用位置法和速率法,通过高精度转台对捷联惯组元件的标度因素、零偏和安装误差进行精确标定。转台只是完成了捷联惯组内部参数的标定,可以实现精确寻北,但是此寻北结果为数字量,不能为外界所直接使用,需要建立一个参考基准,通过一定的技术手段实现方位信息的高精度引出。在实际应用中,一般采用平面镜作为参考基准,通过光学的方法将其引出,以满足实际的需求。但是由于基准镜和惯组姿态之间存在误差,导致方位引出误差,在高精度的方位引出中,必须对此误差进行精确测量。
设平面基准镜坐标系设为m系,以平面镜的法线为 ym轴,向上为 zm轴,构成的右手坐标系 oxmymzm;捷联惯组通过过渡板固定在标准六面体内,精确标定后捷联惯组的右手坐标b系 oxbybzb(标准六面体)。平面镜安装在捷联惯组的机壳上,并与之固联,由于两个坐标系均为正交系,故二者之间的关系如图1所示。
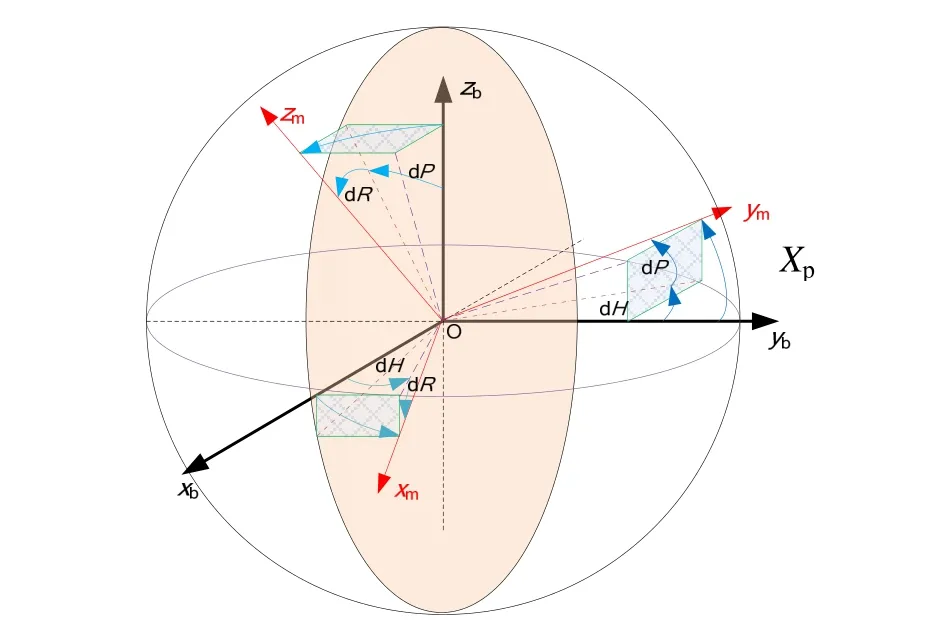
图1 基准镜与惯组姿态误差关系图Fig.1 Attitude errors between reference mirror and IMU
如图1所示,设方位基准镜坐标系m相对捷联惯组载体坐标系b的安装误差角分别为δH、δP、δR,则安装误差坐标变换矩阵为:

式中:δH为方位误差角,δP为俯仰误差角,δR为横倾误差角。
一般来说,安装误差δH、δP、δR都是小角度,则:
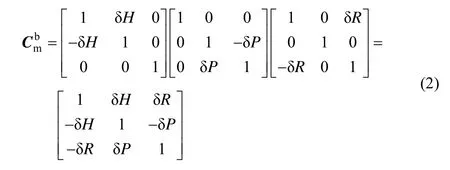
式(2)为捷联惯组输出姿态到平面镜的转换矩阵,其中δH和δP对方位引出精度有影响,需要精确标定。
1.2 捷联惯组方位引出
设H、P和R分别为捷联惯组载体坐标系t的三个姿态角,如图2所示,则载体坐标系b到地理坐标系t变换矩阵为:
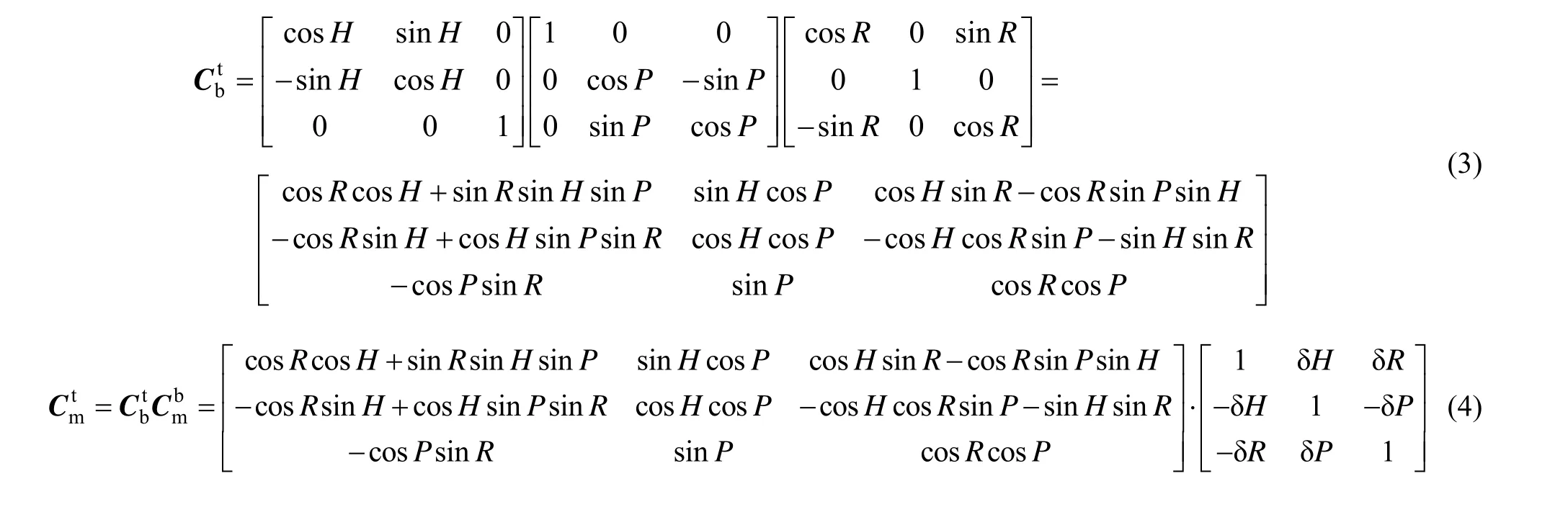
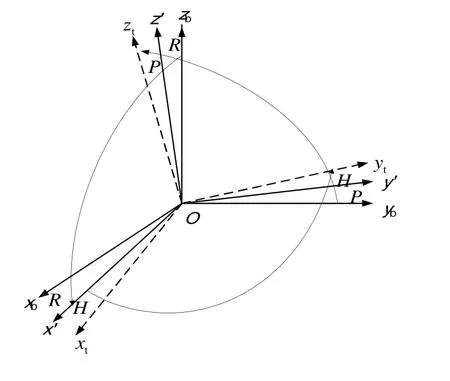
图2 地理坐标系到载体坐标系转换图Fig.2 Transformation from t-frame to b-frame
方位基准镜法线即为可观测的捷联惯组方位姿态角,设为H′,根据姿态提取算法,有:

由捷联惯组方位基准引出的变换过程和方位姿态角的求解可以看出,只需标定安装误差角δH和δP的值即可求出基准镜法线代表的方位基准,实现高精度方位引出。
1.3 方位基准的标定
基准镜安装误差角δH和δP两个参数可以通过L型大理石平板、标准六面体、电子经纬仪等设备来标定。首先将捷联惯组安装在标准六面体上,通过高精度三轴转台完成惯性元件标度因素、零偏、安装误差的标定。标定完成后,捷联惯组解算坐标系已与六面体坐标系一致,因此可以通过测量六面体坐标系与基准镜坐标的误差关系来确定δH和δP两个误差参数。将安装有捷联惯组的标准六面体放置于水平调平的L型大理石平板上不同的位置,利用电子经纬仪,借助实验室内固定的高精度北向方位基准,完成基准镜与六面体的误差角的标定。
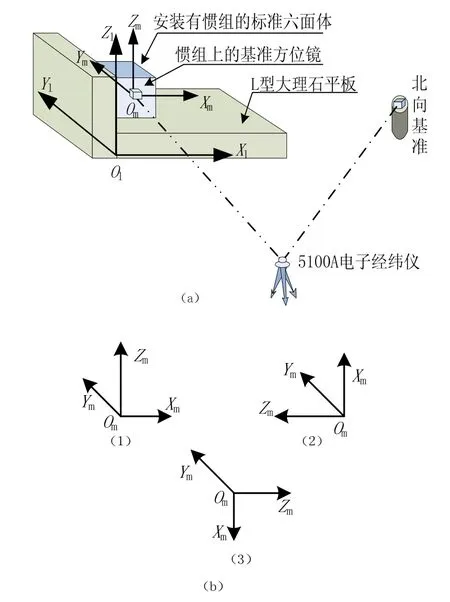
图3 标定示意图Fig.3 Scheme of calibration
标定器材、惯组、北向基准的布局示意图如图3所示。OmXmYmZm为惯组基准镜坐标系,OlXlYlZl为 L型大理石平板坐标系, Xl为大理石平板的水平面,Zl为L型大理石平板的垂直靠面,向上为正,Yl与 Xl、 Zl构成右手系。
采用多位置法进行标定,即改变安装有惯组的标准六面体在L形大理石平板上的不同位置,在每个位置用电子经纬仪测试惯组上基准镜与北向基准的方位角和俯仰角,计算出δH和δP的值。在标定中,需要将L形大理石平板调至水平状态,每次翻动标准六面体时,需要靠紧L形大理石平板的垂直面,经纬仪采用自准直状态进行校准,其标定方法如下:
第一步:安装有捷联惯组的标准六面体处于水平姿态,即 R= 0,P = 0,H = γ,其中γ为一固定方位角,如图3中(b-1)所示。此时,用电子经纬仪通过北向基准校准捷联惯组方位基准镜的方位,得到读数为。根据式(5),此时方位基准镜法线方向应为:

整理,得:

安装误差δH为小角度,不失一般性,得:

式中: H1′为校准的方位值;H为捷联惯组方位值。
第二步,翻动标准六面体,使捷联惯组处于R= 90, P= 0,H = γ的姿态,如图3中(b-2)所示。采用同样的方法校准基准镜的方位值为 H2′。根据(5)式,此时方位基准镜法线方向应为:

第三步,翻动标准六面体,使捷联惯组处于R=-9 0, P= 0,H = γ的姿态,如图3中(b-3)所示。此时,用经纬仪测量方位基准镜,得到读数为 H3′。根据式(5),此时方位基准镜法线方向应为:

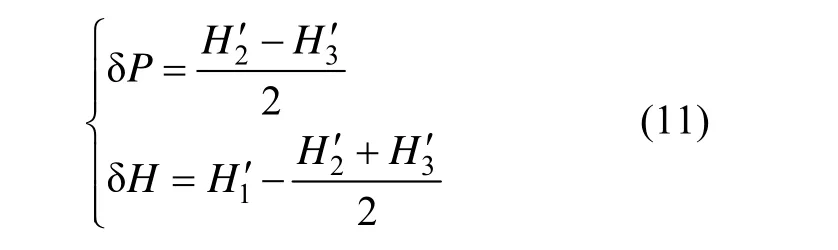
每次瞄准时,标准六面体都与L形靠面靠紧,以上三次测量时惯组的方位值是一致的。联立式(8)~(10),解得:
通过以上方法即可求出所需要的安装误差角,下面通过实际数据研制误差标定的有效性和准确性。
2 方位引出误差
2.1 测量精度分析
通过上述标定方案和步骤可以看出,影响方位引出精度和标定精度的主要误差在于方位角测量精度、标准六面体的加工精度、L形靠面的精度和大理石平板的水平精度。通过安装误差标定过程可以看出,大理石平板的水平精度影响最小,可以忽略。重复测试表明,标准六面体多次在 L形靠面上靠紧后,方位基准镜法线重复瞄准精度优于2.0″。徕卡T5100A经纬仪的测角精度优于 0.5″,其它不确定误差为 1.0″因此,方位基准的标定精度优于 3″,满足高精度方位引出的要求。
2.2 标定实验
首先,需要在高精度转台上对捷联惯组进行标定,得到捷联惯组各惯性敏感元件的参数及其安装误差。装订到捷联惯组解算软件中,则把捷联惯组导航坐标系建立在标定六面体上。然后,按照1.3所述方法进行3位置的标定试验,数据如表1所示。
根据式(11)计算δH和δP的值分别为-4.3′和-0.6′。
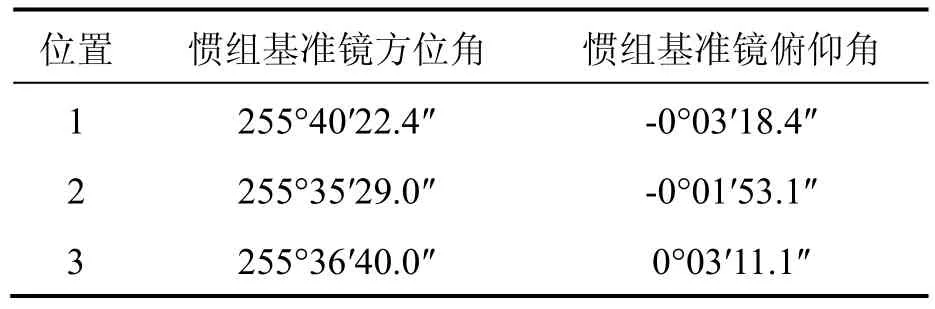
表1 安装误差标定试验结果Tab.1 Calibration test results of installation errors
2.3 方位引出实验
借助标准六面体完成方位基准镜安装误差的标定后,根据捷联惯组的姿态角信息和安装误差,通过公式(5),得到捷联惯组的方位角,实现了高精度方位引出。为准确检验方位引出精度,需要消除捷联惯组寻北误差的影响,为此采用差值法来对方位引出精度进行检验,具体步骤是:
① 把捷联惯组放置在实验室内,完成初始对准;
② 改变捷联惯组的姿态,通过式(5)计算,得到捷联惯组的方位引出值;
③ 用电子经纬仪借助北向方位基准,瞄准捷联惯组方位引出基准镜,得到捷联惯组的校准误差;
④ 在不同姿态下,重复②、③。
部分数据如表2所示:经过标定后,捷联惯组的方位引出值与经纬仪校准值之差的均值为捷联惯组的寻北误差,与这个均值的误差即为不同姿态下捷联惯组的方位引出误差。从由表2所列的实验结果看,捷联惯组方位引出的误差小于3″,证明了上述安装误差标定和方位引出方案的准确性。
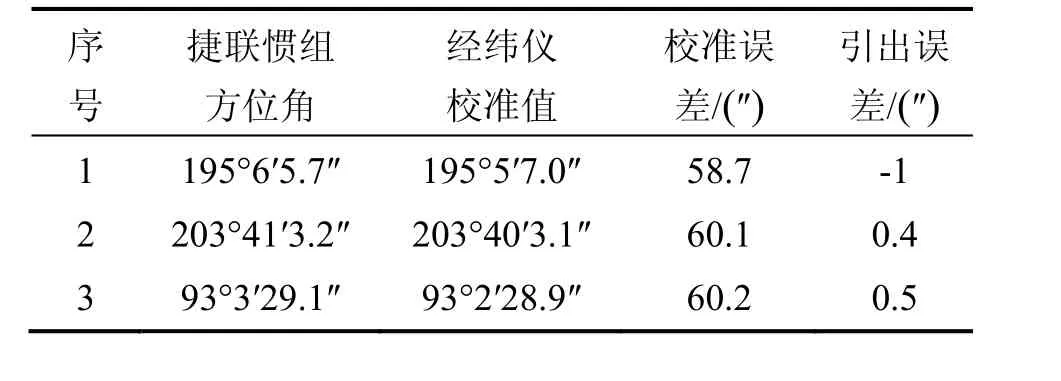
表2 方位引出试验结果Tab.2 Test results of azimuth deduction
3 结 论
本文提出了一种捷联惯组方位基准的高精度标定方法。根据坐标系间矩阵变换关系,得出了一种捷联惯组高精度方位引出方案,设计了一种方位基准标定方法,并对标定精度进行了分析,最后通过实验验证了标定和方位引出方案。该方法可以实现捷联惯组方位基准的高精度标定和方位信息的引出,为捷联惯组高精度方位引出提供了有效的技术手段。
(References):
[1] 胡佩达,高钟毓,张嵘,韩丰田. 基于三轴摇摆台的高精度姿态试验系统[J]. 中国惯性技术学报,2013,21(2):271-274.
HU Pei-da, GAO Zhong-yu, ZHANG Rong, HAN Fengtian. High accuracy attitude testing system based on threeaxis test table[J]. Journal of Chinese Inertial Technology, 2013, 21(2): 271-274.
[2] 张磊,李辉,韩涛,郑振宇. 舰船武器系统姿态基准坞内标校新方法[J]. 中国惯性技术学报,2013,21(2):275-280.
ZHANG Lei, Li Hui, HAN Tao, ZHENG Zhen-yu. New method of dock calibration for naval vessel weapon system attitude reference[J]. Journal of Chinese Inertial Technology, 2013, 21(2): 275-280.
[3] 孟世超,李彦征,刘伟,等. 惯性平台姿态在高精度摇摆台上的标校方法[J]. 中国惯性技术学报,2013,21(2):275-280.
MENG Shi-chao, LI Yan-zheng, LIU Wei, et al. Calibration method of inertial platform fixed on high precision turntable[J]. Journal of Chinese Inertial Technology, 2009, 17(2): 250-252.
[4] Johnson G, Waid J, Primm M ,et al. Ship attitude accuracy trade study for aircraft approach and landing operations[C] //IEEE Position, Location and Navigation symposium. 2012: 783-790.
[5] Zhang Lei, Wang Anguo. Vessel surface equipment attitude measurement based on conventional inertial reference system[J]. Advanced Material Research, 2012, 629: 878-883.
[6] WANG An-guo, LI Hui, WANG Yan, et al. A principle of astronomical three-dimensional position fixing based on single baseline radio interferometry[J]. Chinese Journal of Electronics, 2011, 20(1): 183-186.
[7] Savage P G. Strapdown analytics[M]. Mapple Plain, Minnesota: Strapdown Associates, Inc., 2007.
一种高精度捷联惯组方位引出方法
仲 岩1,王丹丹2,王兴全1,王东升1,李彦征1,孙学成1
Azimuth extraction method for high-precision strapdown IMU
ZHONG Yan1, WANG Dan-dan2, WANG Xing-quan1, WANG Dong-sheng1, LI Yan-zheng1, SUN Xue-cheng1
(1. Tianjin Navigation Instruments Research Institute, Tianjin 300131, China; 2. Equipment Department of the Navy, Beijing 100076, China)
A calibration method for the installation error of IMU azimuth reference mirror was designed, and the IMU’s high-precision azimuth output was realized. First,the parameters of IMU fixed in a standard hexahedron was calibrated, and the navigation coordination of IMU was aligned to the standard hexahedron. Then, the installation error of azimuth reference mirror to the standard hexahedron was calibrated on a level marble plate with a L-form edge using a theodolite and based on a north reference installed in the laboratory. By transforming the attitude matrixes of the coordinates to correct the installation errors, it is verified that the mirror becomes the azimuth reference of the IMU, and high-precision extraction of IMU azimuth is realized.
strapdown IMU; azimuth transfer; precise turntable; standard hexahedron; calibration
1005-6734(2014)06-0845-04
10.13695/j.cnki.12-1222/o3.2014.06.027
文献标志码:
2014-07-25;
2014-10-17
国防科技预研重点项目(A0320132002)
仲岩(1969—),女,高级工程师,主要从事导航与控制技术研究工作。E-mail:Zhy@163.com
猜你喜欢
商业评论(2021年10期)2021-10-20
电子制作(2018年17期)2018-09-28
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
数码设计(2018年1期)2018-05-23
北京航空航天大学学报(2017年9期)2017-12-18
北京航空航天大学学报(2017年5期)2017-11-23
中国水运(2017年6期)2017-06-13
北京航空航天大学学报(2017年12期)2017-04-23
电子制作(2017年24期)2017-02-02