
理论力学点的合成运动体系教学探索及实践
2014-10-27 05:28唐红春王璐史永高
江苏建筑职业技术学院学报 2014年1期
唐红春,王璐,史永高
(西安工业大学 北方信息工程学院 建筑工程系,陕西 西安 710032)
理论力学点的合成运动体系教学探索及实践
唐红春,王璐,史永高
(西安工业大学 北方信息工程学院 建筑工程系,陕西 西安 710032)
为降低理论力学点的合成运动学习难度,对其教学方法进行了探索和实践.基于高等数学的有关概念和定理,分别采用极限法和导数法解析了点的合成运动的速度合成定理及加速度合成定理,首次提出了牵连导数的概念,并在教学实践中检验了两种方法的适用性.
理论力学;点的合成运动;牵连导数;极限法;导数法
理论力学是高等工科院校土木、机械等专业重要的基础课之一[1].其中,点的合成运动部分的理论知识点理解起来有较大难度[2].但力学问题之所以难于理解,主要在于部分学生高等数学基础不牢或对其知识一知半解,更不能将高数作为一种有效工具应用到力学公式的建立和推导中.为此,有必要将最基本的数学理论引入力学教学中,通过数学的严密和严谨性建立起力学公式推导过程,增加力学公式的可理解程度,从而达到降低学生学习难度的目的.本文拟对理论力学点的合成与运动体系教学进行探讨.由于在点的合成运动公式推导中,教材大多采用的是极限法或导数法[3-5],以下即围绕这两种方法展开讨论.
1 极限法
1.1 点的速度合成定理
物体在t0时刻的瞬 时 速 度[6]v(t0)=,速度的方向沿轨迹的切线,如图1所示.
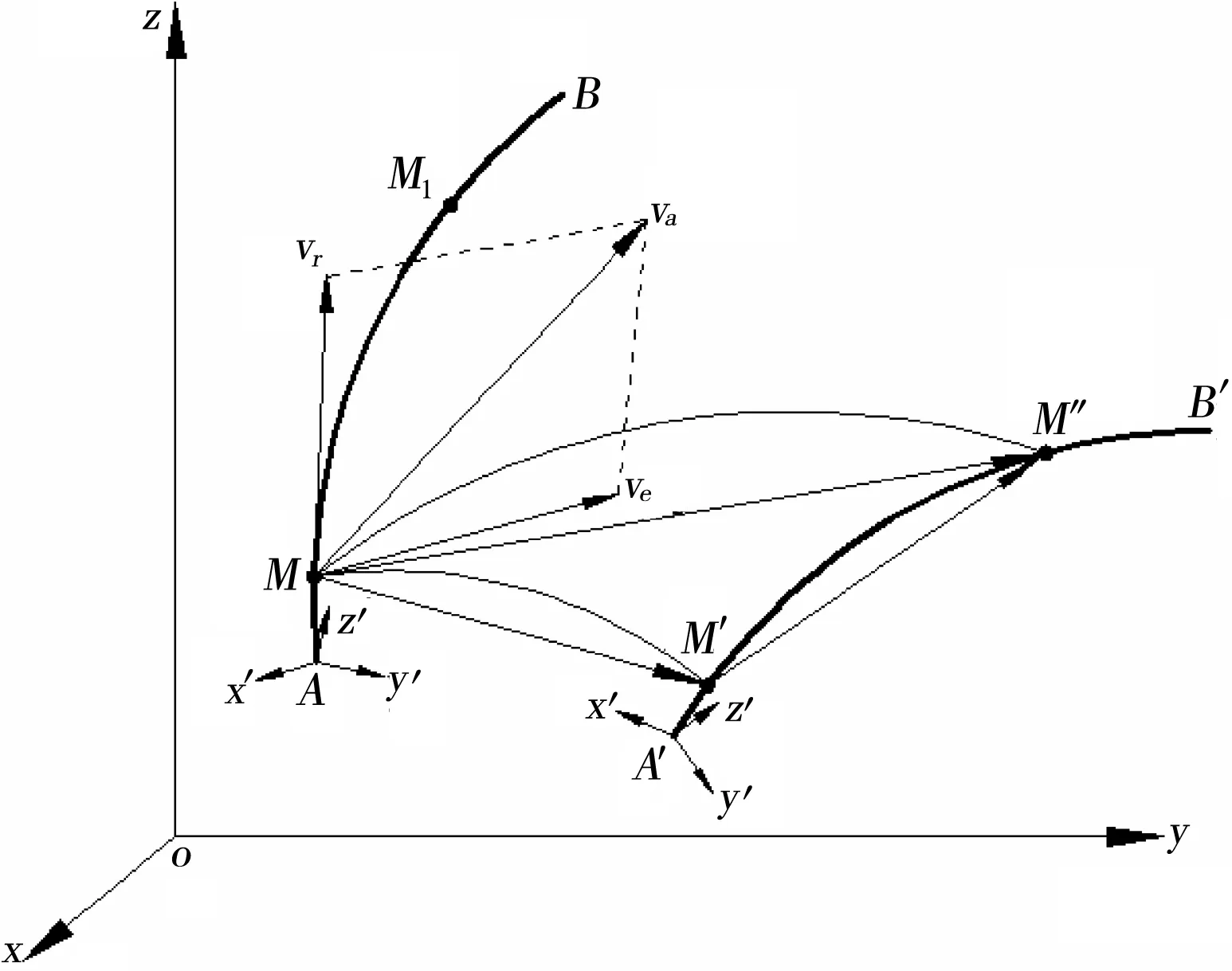
图1 速度合成矢量Fig.1 Vector diagram of velocity composition
由图1可见,在某一瞬时t,光滑弧形结构AB与套在其上的光滑圆环M处各自运动中,经过Δt后,在静坐标系xyz中,AB运动到A′B′位置,在动坐标系x′y′z′中,M沿AB运动至M″.
1.2 点的加速度合成定理
在瞬时t,动点位于弧线AB上的M点,其3种速度分别为va、ve、vr.经过时间Δt后,弧线运动到A′B′位置,动点运动至A′B′上的M″点,此时其绝对3种速度为v′a、v′e、v′r.可将动点M到M″的连续过程分为2个阶段,如图2~3所示.
1)图2显示,从瞬时t→t+Δt1,AB运动到A′B′位置,AB上两固定点M和M″分别沿图示任意轨迹运动到A′B′上的点M和M″位置,而此时动点M瞬间变为M′点,为下一步运动作准备.因为M点固连于AB上,故无论AB如何运动,均不影响相对速度vr的大小,即|vr1|=|vr|,但方向不同,分别沿着AB和A′B′切线方向.而牵连运动的大小和方向均不同,即|ve|≠|ve1|,分别沿各自轨迹切线方向.需要说明的是,牵连运动是整个刚体AB相对静系的运动[7],其上各点的牵连速度在一般情况下是不同的.AB上固定点M″因受牵连运动,经过时间Δt1后到达A′B′上点M″,也具有牵连速度v′e,这是由于牵连运动为任意曲线的原因.因牵连点不同,|ve1|≠|v′e|,方向也不同,取决于轨迹.

图2 牵连速度矢量Fig.2 Vector diagram of carrier velocity

图3 相对速度矢量Fig.3 Vector diagram of relative velocity
2)图3表明,经过Δt2后,即t+Δt1→t+Δt时间段,动点M′沿A′B′运动到M′,相对速度由vr1变为vr,,方向沿轨迹切线.
因va=ve+vr,v′a=v′e+v′r,va1=ve1+vr1,按 各自加速度的定义[5]有:

如果牵连运动为平移,则|v′e|=|ve1|,方向也相同;而|vr1|=|vr|,方向亦相同,故ak=0.此时有aa=ae+ar.
2 导数法
2.1 基础理论
矢量是既有大小又有方向的量.一般来说,在物理学中称作矢量,在数学中称作向量.对矢量求导时,只要大小或方向是时间的函数,就必须将该要素对时间求导.速度由导数表示为:v=d r/d t=˙r.
如图4所示,oxyz为静系,o′x′y′z′为动系.动系的3个单位矢量分别为i′,j′,k′.M为动点,M′为牵连点.根据向量计算规则有rM=ro′+r′,r′=r′xi′+r′yj′+r′zk′.r′x,r′y,r′z分别 表示矢 量r′在动 系的3 个坐标轴上的投影值,且在瞬时有rM=rM′.

图4 点的合成运动图Fig.4 Diagram of composition motion of a point
2.2 绝对运动分析
在绝对导数中,因所有参数都是时间的函数,故

2.3 相对运动分析
相对导数认为,矢径r′中的参数r′x,r′y,r′z随动点的运动而变化,是时间的函数.而i′,j′,k′不是时间的函数,记为
根据相对加速度定义,相对速度的相对导数即相对加速度ar.
ar=.则
2.4 牵连运动分析
牵连导数认为:r′M=ro′+r′xi′+r′yj′+r′zk′中的r′x,r′y,r′z在瞬时是定值,不是时间的函数.而i′,j′,k′是时间的函数,记为
动点的牵连速度

牵连速度的绝对导数为

牵连速度的牵连导数为

牵连速度的牵连导数就是牵连加速度ae,即ae=则
根据速度合成定理和导数的计算规则有

可以证明[5],故aa=ae+ar+2ωe×vr.
3 结语
利用极限法和导数法均能推导出点的速度及加速度合成定理.极限法具有严谨的几何意义,推导过程较为简洁,但由于3种运动、速度和加速度的概念较多,也较抽象,加之动点和速度本身的不断变化,使得对运动过程的理解有一定难度.导数法具有严谨的数学意义,推导过程和表达式较为复杂,但概念不多,也不难理解.笔者在近几年理论力学授课过程中,分别采用了两种方法进行讲解,通过学生反映及对其学习掌握程度分析,采用导数法推导点的速度和加速度合成定理比采用极限法推导更容易使学生理解.
[1] 陈建平,陶秋凡,吴文龙.理论力学中动力学问题的演变与创新思维训练[J].力学与实践,2004,26(5):72-74.
[2] 冯立富,郭书祥,李颖.点的合成运动与“全程分析法”[J].空军工程大学学报,2002,3(5):86-87.
[3] 张功学.工程力学[M].北京:国防工业出版社,2008:266-267.
[4] 尹冠生.理论力学[M].西安:西北工业大学出版社,2000:127-128.
[5] 哈尔滨工业大学理论力学教研组.理论力学[M].北京:高等教育出版社,2009:175-184.
[6] 周家良,王群智.高等数学[M].西安:西北大学出版社,2011:57-57.
[7] 王斌耀,徐鉴.关于点的合成运动速度合成定理两种推导的辨析[J].力学与实践,2007,29(5):64-66.
[8] 张秉荣.工程力学[M].北京:机械工业出版社,2012:95-100.
Teaching exploration and practice on system of composite motion of points in theoretical mechanics
TANG Hong-chun,WANG Lu,SHI Yong-gao
(Architectural Engineering Department,Xi'an Technological University North Institute of Information Engineering,Xi'an,Shaanxi 710032,China)
In order to reduce the difficulty of learning composite motion of point in theoretical mechanics,this paper carries out exploration and practice.Based on related concepts and theorems of higher mathematics,this paper analyzes speed synthesis theorem and acceleration synthesis theorem of composite motion of points using methods of limit and derivative,puts forward the concept of implicated derivative,and tests the applicability of the methods in teaching practice.
theoretical mechanics;composite motion of points;implicated derivative;limit algorithm;derivative algorithm
O 311.1
A
2095-3550(2014)01-0087-03
2013-11-22
西安工业大学北方信息工程学院教学改革基金项目(YJ1226)
唐红春,男,江苏泰州人,讲师,硕士研究生.
E-mail:35054034@qq.com
(责任编辑:赵国淮)
猜你喜欢
快乐语文(2021年11期)2021-07-20
中学生数理化(高中版.高二数学)(2021年4期)2021-07-20
快乐语文(2020年36期)2021-01-14
快乐语文(2020年30期)2021-01-14
中学生数理化·中考版(2019年8期)2019-07-13
中学生数理化·七年级数学人教版(2017年9期)2017-12-20
数学大世界(2017年15期)2017-06-21
数学大世界·中旬刊(2017年3期)2017-05-14
高中生学习·高三版(2016年9期)2016-05-14
中学生天地(A版)(2016年5期)2016-05-14
