
基于CFD不同AUV艇体的阻力性能分析
2014-11-12 08:04魏子凡俞强杨松林
中国舰船研究 2014年3期
魏子凡,俞强,杨松林
江苏科技大学船舶与海洋工程学院,江苏镇江 212003
0 引 言
自主水下航行器(AUV)综合了人工智能、智能控制、探测识别、信息融合及系统集成等多方面的技术,可以在复杂的水下环境中,在无人控制的情况下自己决策、控制完成设定好的任务[1]。AUV的研究始于20世纪60年代,早期发展缓慢,主要受硬件、能源、电子技术及控制技术等技术的限制[2]。目前,AUV主要应用于海上石油与天然气等资源的开发和军事作战。
当前航行器的外形最为常见的是回转体,如水滴形、鱼雷形(AUTOSUB)和层流低阻力形等[3]。一般小型的AUV多为回转体,这种形状的设计不仅使艇体的水动力特性较好,更重要的是这种形状已经过大量的试验测试和研究[4]。例如,AUTOSUB型、HUGIN型、REMUS型和BLUEFIN型等均为回转体外形,另外也有一些AUV的外形为非回转体,如FLATFISH型的外形类似于扁鱼形[5]。
本文将通过研究AUV在水下航行时水流流动的情况来确定AUV的阻力。当前,CFD方法、理论分析法和试验测量法是研究流体流动问题的主要方法。理论分析的结果一般带有普遍性,需要抽象和简化计算对象才能得到理论解。试验测量虽然能得到真实、可靠的试验结果,但其操作周期性长、费用高、操作复杂,而且还不能直观地观察流场。相比之下,CFD数值模拟方法则能成功克服上述2种方法的不足,不仅可以形象地展现流动情景,费用少、重复性好,而且还可以调整各个参数来研究它们对水动力性能的影响[6]。目前,“ITTC 1957 correlation line”已经验证了采用CFD分析法估算阻力的可靠性[7]。
1 艇体模型的建立
本文的设计研究对象为AUTOSUB,HUGIN,REMUS,BLUEFIN1和BLUEFIN2。通过参考国外的图纸及相关资料[8-11],改变平行中体的直径以对整个艇体型线进行缩放处理,得到了5种艇型的主要参数(表1),并绘制了相应的母线图(图1~图3)。
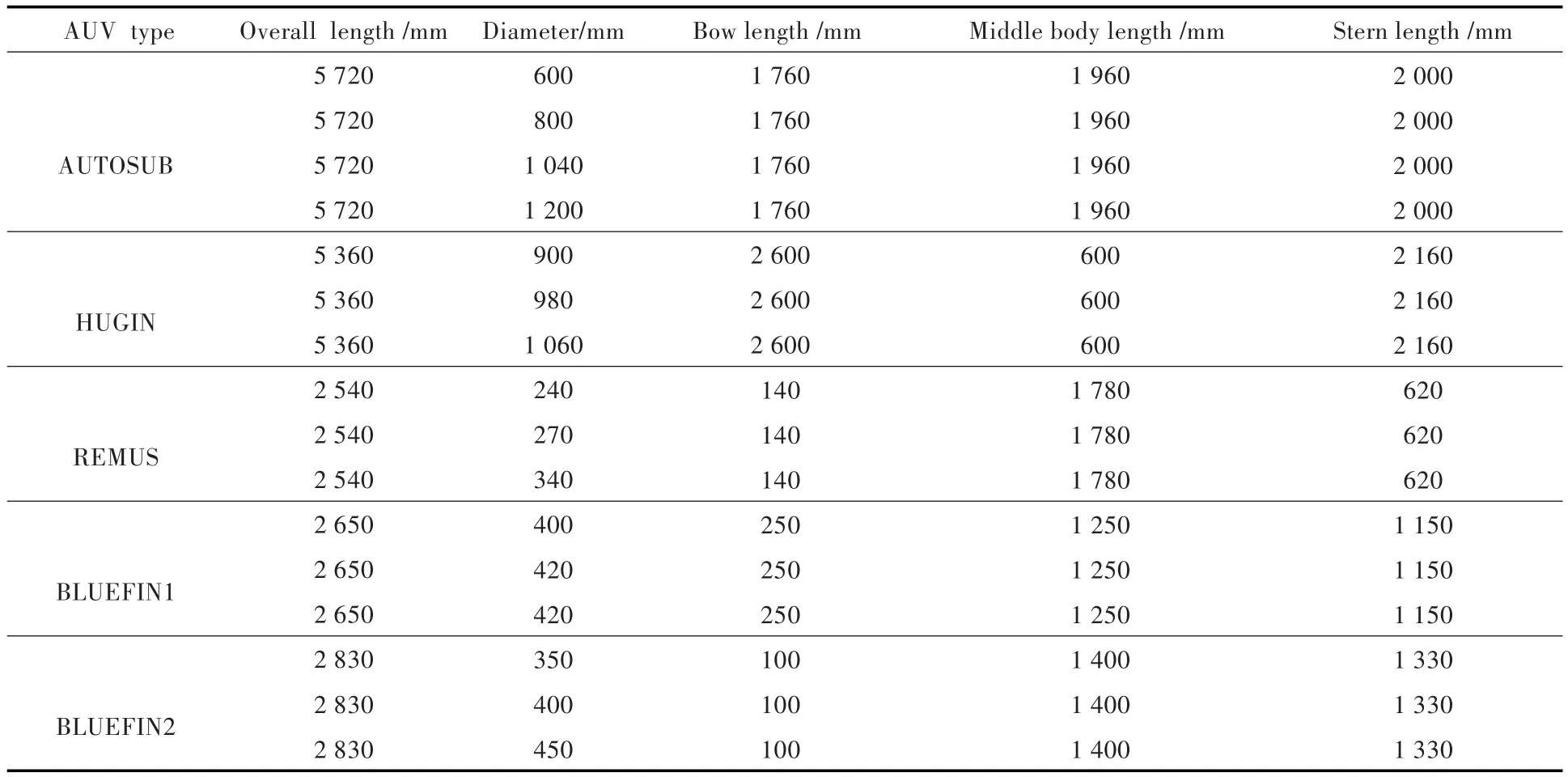
表1 5种AUV的型线主要参数Tab.1 Main parameters of molded lines for five kinds of AUVs

图1 AUTOSUB型和HUGIN型不同直径的艇体母线图Fig.1 The generatrix of hulls for different diameters of AUTOSUB and HUGIN

图2 REMUS型不同直径的艇体母线图Fig.2 The generatrix of hulls for different diameters of REMUS
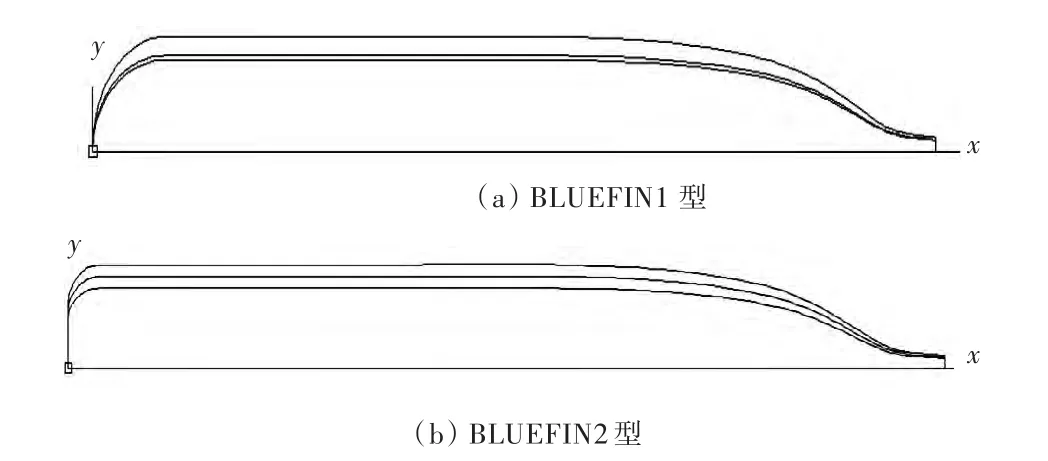
图3 BLUEFIN1型和BLUEFIN2型不同直径的艇体母线图Fig.3 The generatrix of hulls for different diameters of BLUEFIN1 and BLUEFIN2
尾舵翼型的厚度越大,对应的失速攻角便越大,且能达到的最大升力系数也越大。本文选用NACA0012翼型的舵,这种翼型失速时攻角已达16°,且能达到很高的升阻比,因而能在较小的阻力情况下得到较大的操纵力矩[12]。
对于AUTOSUB型的舵:其剖面形状采用NACA0012翼型(图4),主要参数如表2所示;其导缘位于距AUV头部5120 mm位置处,如图5所示。为便于表达,以下艇体的命名格式写为:艇型—平行中体直径—舵的展弦比。

表2 AUTOSUB型的舵的主要参数Tab.2 The main parameters of rudders of AUTOSUB

图4 NACA0012剖面Fig.4 The section of rudder named NACA0012

图5 不同展弦比的舵和AUTOSUB-800-0.93Fig.5 The rudders of different aspect ratio and AUTOSUB-800-0.93
对于HUGIN型的舵:剖面形状采用NACA0012翼型,其根部弦长为460 mm,翼端弦长为240 mm,半展长为380 mm,舵的展弦比 λ=1.086;其导缘位于距AUV头部4840 mm位置处,如图6所示。
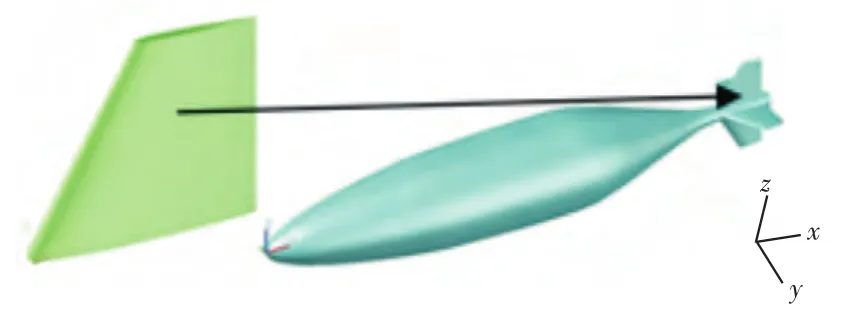
图6 HUGIN-980-1.086Fig.6 HUGIN-980-1.086
对于REMUS型的舵:剖面形状采用NACA0012翼型,其根部弦长为130 mm,翼端弦长为80 mm,半展长为140 mm,舵的展弦比 λ=1.33;其导缘位于距AUV端部2250 mm位置处,如图7所示。
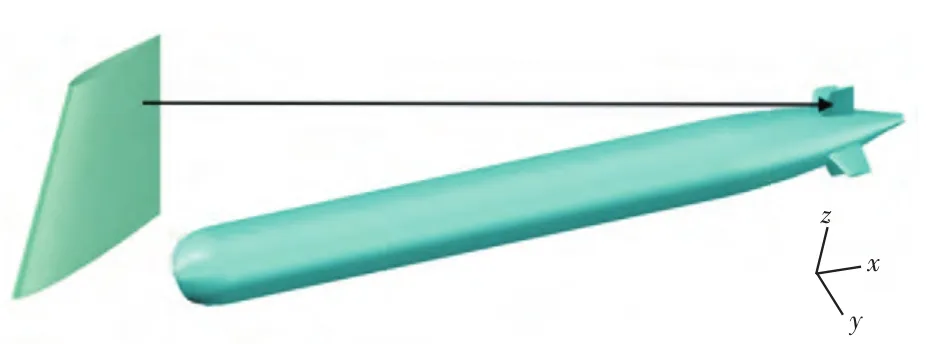
图7 REMUS-270-1.33Fig.7 REMUS-270-1.33
BLUEFIN型采用整流罩,剖面形状采用NACA0012翼型,其宽度为150 mm,直径为420 mm;其起始端位于距AUV尾端150 mm位置处,如图8所示。

图8 BLUEFIN1-420Fig.8 BLUEFIN1-420
2 CFD数值模拟分析
大多数情况下,数值计算与模型试验相比其精度相当,它不仅可以获得阻力、尾流场等结果,更重要的是它还可以提供诸如附体周围流场、桨和舵对船体流场的影响等详细信息。本文采用CFD数值模拟方法对航行器的阻力进行了大量的计算与分析,CFD计算结果的精确度取决于计算机的性能、几何模型的形状、网格划分的质量、计算模式的选择、参数的选取以及边界条件的设置等情况[13]。图9所示为CFD模拟的流程图,图10所示为部分艇体的网格划分图,图11所示为AUV解算模型和CFD-post后处理的AUV艇体压力云图。

图9 CFD模拟流程图Fig.9 Flow chart of numerical simulation
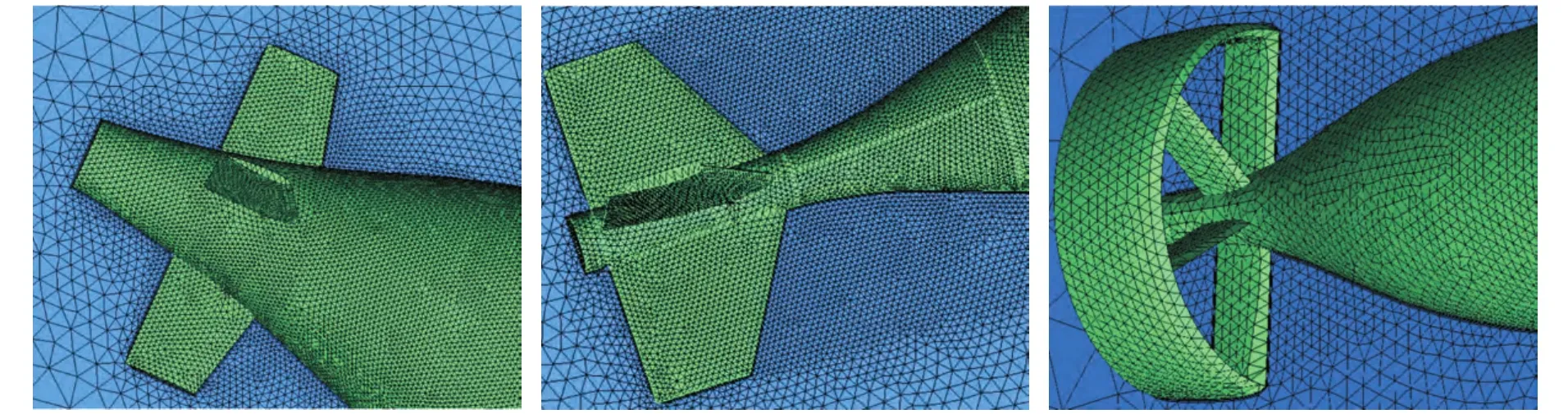
图10 网格划分图Fig.10 Mesh division for AUVs
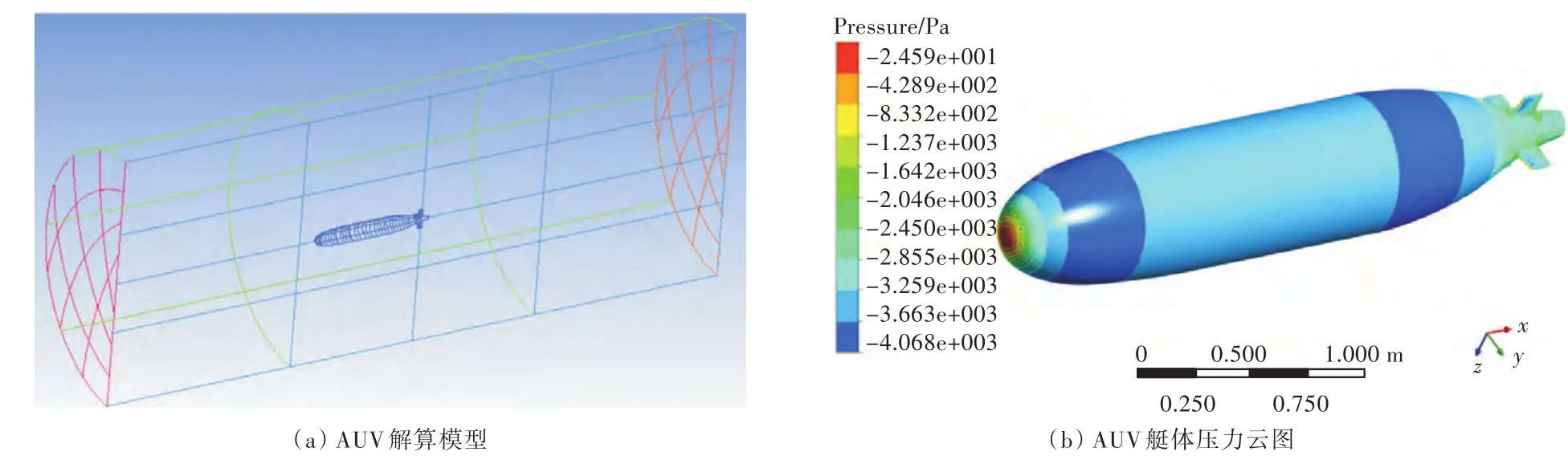
图11 AUV解算模型和CFD-post后处理的AUV艇体压力云图Fig.11 Computational model and pressure contours of the AUV obtained by CFD-post
3 艇体阻力性能分析
3.1 评判流动模式
本文采用标准k-ε,RNG k-ε和SST k-ω这3种湍流模式进行模拟,本节应用“相当平板”假定的摩擦阻力公式计算理论值。
理论计算摩擦阻力过程如下所示。
雷诺数:

式中:V为航速,m/s;L为艇长,m;ν为运动粘性系数,m2/s。
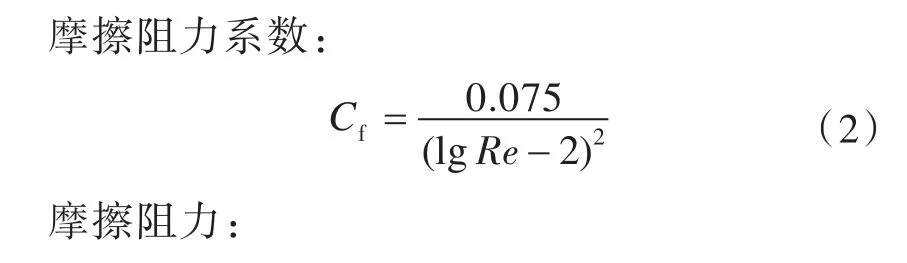

式中:ρ为海水密度,kg/m3;S为艇体表面湿面积,m2;ΔCf为与雷诺数无关的粗糙度补贴系数,其取值为0.0004。将式(1)和式(2)代入式(3),即可得到该艇体在该航速下的摩擦阻力值。
图12和图13所示为标准 k-ε,RNG k-ε和SST k-ω这3种湍流模式的CFD模拟计算值与理论计算值之间的误差图,其中,误差=(摩擦阻力公式计算值-CFD计算的摩擦阻力)/摩擦阻力公式计算值。
数值仿真可以用于阻力性能的预测,其中SST k-ω模式的预测精度较高[14]。本文采用3种不同的湍流模式数值模拟了不同水下航行器的阻力性能,与应用“相当平板”假定的摩擦阻力公式所得的摩擦阻力计算值之间的误差基本在10%以内,满足工程误差要求,可见数值仿真预报达到了较高的精度。
由图12和图13可见,RNG k-ε模式和SST k-ω模式的效果较好,其中SST k-ω模式更精确,而标准k-ε模式相较于前两者其精度则不是很高。因此,SST k-ω模式适合水下艇的阻力计算,且摩擦阻力计算公式的计算结果可以在工程允许的情况下代替CFD的计算。故本文下面将对SST k-ω模式产生的数据进行处理。

图12 AUTOSUB-1040-0.93,AUTOSUB-1040-1.4和HUGIN-900的3种模式误差图Fig.12 Error graphs of three modes of AUTOSUB-1040-0.93,AUTOSUB-1040-1.4 and HUGIN-900

图13 BLUEFIN1-400,REMUS-240和BLUEFIN2-360的3种模式误差图Fig.13 Error graphs of three modes of BLUEFIN1-400,REMUS-240 and BLUEFIN2-360
3.2 相似径长比不同艇型的阻力性能比较分析
3.2.1 AUTOSUB-600和REMUS-270的比较
AUTOSUB-600和REMUS-270的阻力性能比较如图14所示。通过比较这2种不同艇型的AUV发现,不论是单位排水量的总阻力Rt还是单位排水量的粘压阻力Rpv,AUTOSUB型的都比REMUS型的小,其值约为REMUS型的30%~50%。由此可见,AUTOSUB艇型要优于REMUS艇型。

图14 相似径长比AUTOSUB-600型和REMUS-270型的 Rt/Δ~Vs和 Rpv/Δ~Vs比较Fig.14 The comparison of total resistance and viscous pressure resistance between AUTOSUB-600 and REMUS-270 with similar diameter-length ratio
另一方面,REMUS型在低速时与AUTOSUB型的单位排水量的总阻力差距不大,但随着速度的增加,其单位排水量总阻力上升很快,因此可以看出,REMUS型适合低速航行。
3.2.2 AUTOSUB-1040,HUGIN-980和 BLUEFIN1-500的比较
AUTOSUB-1040,HUGIN-980和BLUEFIN1-500的阻力性能比较如图15所示,这3种艇型的径长比比较接近。通过比较这3种艇型单位排水量的总阻力Rt和单位排水量的粘压阻力Rpv发现,AUTOSUB-1040的最小,其次是HUGIN-980,可见AUTOSUB艇型要优于其他2种,而HUGIN型虽然不如AUTOSUB型,但其阻力性能与AUTOSUB型相比相差并很大。同时还可发现,BLUEFIN1-500在高速时其阻力要比低速时大得多,可见这种艇型适于低速航行。

图15 相似径长比AUTOSUB-1040,HUGIN-980和BLUEFIN1-500的 Rt/Δ~Vs和 Rpv/Δ~Vs比较Fig.15 The comparison of total resistance and viscous pressure resistance among AUTOSUB-1040,HUGIN-980 and BLUEFIN1-500 with similar diameter-length ratio
3.2.3 AUTOSUB-1040-0.93和HUGIN-980-1.086的比较
AUTOSUB-1040-0.93和HUGIN-980-1.086的阻力性能比较如图16所示,这两种带舵艇体的径长比和舵的展弦比均较接近。通过比较发现,AUTOSUB型的单位排水量的总阻力Rt和单位排水量的粘压阻力Rpv均较HUGIN型的小,所以带舵的AUTOSUB型要优于HUGIN型。同样可以发现,当低速航行时(约1~2 kn),两者的单位排水量的总阻力相近;但高速时,AUTOSUB型具有更好的阻力性能。

图16 相似径长比AUTOSUB-1040-0.93和HUGIN-980-1.086的 Rt/Δ~Vs和 Rpv/Δ~VsFig.16 The comparison of total resistance and viscous pressure resistance between AUTOSUB-1040-0.93 and HUGIN-980-1.086 with similar diameter-length ratio
3.2.4 AUTOSUB-1200和HUGIN-1060的比较
AUTOSUB-1200和HUGIN-1060的阻力性能比较如图17所示,这2种艇型的径长比比较接近。通过比较这两者的单位排水量的总阻力Rt和单位排水量的粘压阻力Rpv发现,AUTOSUB型的较小,可以说AUTOSUB-1200的艇型要优于HUGIN-1060的艇型。
3.2.5 HUGIN-900和BLUEFIN2-450的比较
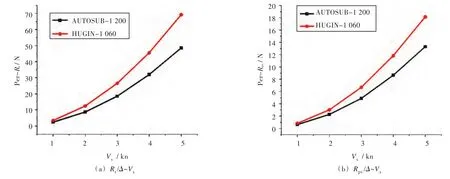
图17 相似径长比AUTOSUB-1200和HUGIN-1060的 Rt/Δ~Vs和 Rpv/Δ~Vs比较Fig.17 The comparison of total resistance and viscous pressure resistance between AUTOSUB-1200 and HUGIN-1060 with similar diameter-length ratio

图18 相似径长比HUGIN-900和BULUEFIN2-450的 Rt/Δ~Vs和 Rpv/Δ~Vs比较Fig.18 The comparison of total resistance and viscous pressure resistance between HUGIN-900 and BLUEFIN2-450 with similar diameter-length ratio
HUGIN-900和BLUEFIN2-450的阻力性能比较如图18所示。对于径长比相同的这2种艇型,通过比较其单位排水量的总阻力Rt和单位排水量的粘压阻力Rpv发现,HUGIN型的要优于BLUEFIN2型的。另通过比较这2种艇型在高速和低速时单位排水量的总阻力Rt,发现BLUEFIN2型的阻力增长幅度较大,可见BLUEFIN2型在通常情况下适于低速航行。
3.2.6 BLUEFIN1-400和BLUEFIN2-400的比较
BLUEFIN1-400和BLUEFIN2-400的阻力性能比较如图19所示。对于这2种径长比相近的艇型,通过比较单位排水量的总阻力Rt和单位排水量的粘压阻力Rpv发现,BLUEFIN1型的阻力性能要优于BLUEFIN2型的,而且随着速度的增加,BLUEFIN2型的单位排水量总阻力要比BLUEFIN1型的大,可见BLUEFIN型的平头型艏部只适合低速航行状态。

图19 相似径长比BLUEFIN型的 Rt/Δ~Vs和 Rpv/Δ~Vs比较Fig.19 The comparison of total resistance and viscous pressure resistance between BLUEFIN1-400 and BLUEFIN2-400 with similar diameter-length ratio
3.2.7 AUTOSUB-800,REMUS-340和 BLUEFIN2-350的比较
AUTOSUB-800,REMUS-340和 BLUEFIN2-350的阻力性能比较如图20所示。通过比较这3种具有相似径长比的艇型发现,AUTOSUB-800的单位排水量的总阻力Rt和单位排水量的粘压阻力Rpv均比REMUS-340型和BLUEFIN2-350型的小得多。可见AUTOSUB-800的艇型要优于其他两种。另通过比较REMUS型和BLUEFIN2型,研究得出REMUS型的单位排水量的总阻力Rt和单位排水量的粘压阻力Rpv均比BLUEFIN2型的小,可见REMUS的艇型要优于BLUEFIN2的艇型。
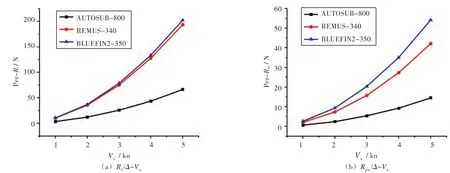
图20 相似径长比 AUTOSUB-800,REMUS-340和BLUEFIN2-350的 Rt/Δ~Vs和 Rpv/Δ~Vs比较Fig.20 The comparison of total resistance and viscous pressure resistance among AUTOSUB-800,REMUS-340 and BLUEFIN2-350 with similar diameter-length ratio
3.3 AUTOSUB带舵和无舵比较
图21所示为不同直径艇体带舵时比无舵时总阻力增大的百分数折线图,其中Rt2表示带舵时的总阻力,Rt1表示无舵时的总阻力。
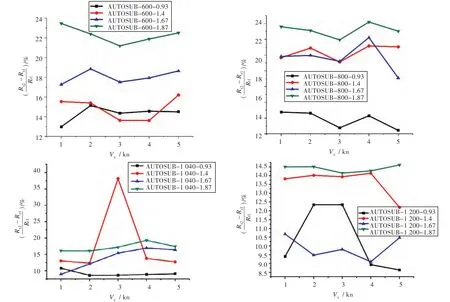
图21 不同展弦比舵的艇体较无舵时的阻力增大的百分数Fig.21 The increasing percentage of total resistance for the AUTOSUB with rudder compared with the one without rudder
通过对比研究4种带不同展弦比舵的艇体,表明在低速航行时,舵的展弦比λ=0.93的艇体其阻力性能较好;在中速航行时,大直径的艇体,即舵的展弦比 λ=1.67的其阻力性能较好;在高速时,舵的展弦比λ=0.93的其阻力性能较好;而舵的展弦比λ=1.87的艇体其阻力性能较差。
3.4 带整流罩和无整流罩的BLUEFIN型的阻力性能比较
经研究表明,如图22所示,带整流罩艇体的粘压阻力Rpv增大的程度较大,但对摩擦阻力Rf的影响却较小,由此可以看出整流罩对艇体的粘压阻力Rpv影响巨大。而且,BLUEFIN1和BLUEFIN2型这2种艇型具有相同的整流罩,但相比BLUEFIN2型,整流罩对BLUEFIN1型的粘压阻力的影响要大得多。通过比较图23,发现BLUEFIN1型和BLUEFIN2型的阻力性能相近,但BLUEFIN1型的稍优。图中,zlz表示整流罩。
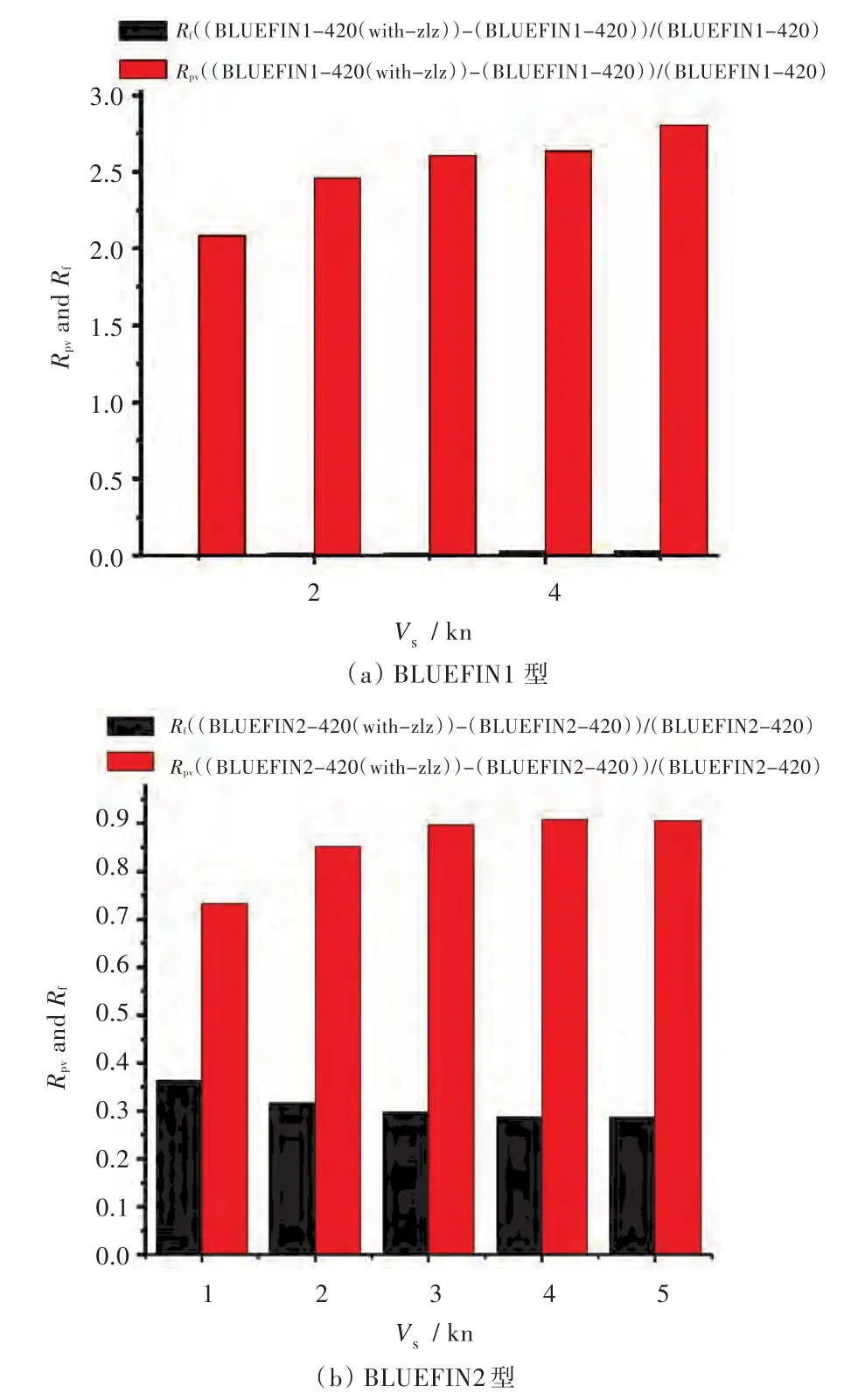
图22 与不带整流罩时的相比,带整流罩BLUEFIN1型和BLUEFIN2型的Rf和Rpv增大的比例Fig.22 The increasing proportion of friction resistance and viscous pressure resistance for BLUEFIN with or without fairing

图23 带整流罩和裸艇体BLUEFIN型的Rt/Δ~VsFig.23 The total resistance of unit displacement for BLUEFIN1 and BLUEFIN2 with or without fairing
4 结 语
本文对36个不同艇体的AUV,选用3种湍流模式进行了CFD数值模拟,一方面验证了CFD模拟的可靠性,另一方面,研究表明SST k-ω模式具有很高的模拟精度,验证了文献[10]的结论。在本文所研究的5种艇型中,AUTOSUB型最优,其次是HUGIN型、REMUS型和BLUEFIN1型,最后是BLUEFIN2型,其中AUTOSUB型和HUGIN型适合中、高速航行,REMUS型和BLUEFIN型适合低速航行。另外,在BLUEFIN型的两种艏部形状中,圆形比钝形的阻力性能要好。在AUTOSUB型中,直径为1200 mm舵的展弦比λ=1.67的艇体阻力性能最优;在HUGIN型中,直径为980 mm的艇体的阻力性能最优。
多数情况下,CFD模拟与模型试验的精度相当,它不仅可以获得阻力、尾流场等结果,更重要的是它还可以提供诸如附体周围流场、桨和舵对船体流场的影响等详细信息,而且重复性好,便于调整设置参数,随着计算机的发展,其应用将更加广泛。
[1]徐玉如,李彭超.水下机器人发展趋势[J].自然杂志,2011,33(3):125-132.XU Yuru,LI Pengchao.Developing tendency of unmanned underwater vehicles[J].Chinese Journal of Nature,2011,33(3):125-132.
[2]何漫丽.水下自航行器水动力学特性数值计算与试验研究[D].天津:天津大学,2005.
[3]POTTER I J.A systematic experimental and analytical investigation of the autonomous underwater vehicle design process with particular regard to power integration[M].Calgary:University of Calgary,1997.
[4]SARKER T,SAYER P G,FRASER S M.Feasibility study of laminar flow bodies in fully turbulent flow[C]//The Fourth International Offshore and Polar Engineering Conference,International Society of Offshore and Polar Engineers,1994:607-615.
[5]AAGE C,SMITT LW.Hydrodynamic maneuverability data of a flat-fish type AUV[C]//Proceedings of Oceans'94MTS/IEEE Conference.Brest,France,1994:425-430.
[6]周晗,谢海斌,徐海军,等.基于CFD的水下机器人载体形体阻力优化设计[C]//2009系统仿真技术及其应用学术会议论文集.安徽,中国,2009:47-51.
[7]JOUNG T,SAMMUT K,HE F.A CFD(Computer Fluid Dynamics)analysis based design method for an autonomous underwater vehicle ducted propeller[C]//Proceedings of the 20th(2010)International Offshore and Polar Engineering Conference.Beijing,China,2010:1-8.
[8]BLUEFIN Robotics.Developing,building and operating autonomous underwater vehicles and related technologies for customers worldwide [EB/OL].(2013-10-07)[2013-11-1].http://www.bluefinrobotics.com/.
[9]JC060 cruise blog. Autosub 6000[EB/OL].(2011-6-12)[2013-11-1].http://www.eu-hermione.net/item-1.
[10]VESTGARD K,HANSEN R,JALVING B,et al.The HUGIN 3000 survey AUV[C]//SOPE-2001:Eleventh(2001)International Offshore and Polar Engineering Conference.Stavanger,Norway,2001.
[11]Autonomous underwater vehicle-REMUS 600[EB/OL].(2012-1-11)[2013-11-1].http://www.km.kongsberg.com/ks/web/nokbg0240.nsf/AllWeb/F0437252E45256BDC12574AD004BDD4A?Open-Document.
[12]武建国,张宏伟.小型自主水下航行器尾舵设计与研究[J].海洋技术,2009,28(3):5-8.WU Jianguo,ZHANG Hongwei.Design and research on the rudder of mini-type AUV[J].Ocean Technology,2009,28(3):5-8.
[13]POZRIKIDIS C.Fluid dynamics:theory,computation,and numerical simulation[M].German∶Springer,2009.
[14]于宪钊,苏玉民,王兆立,等.微小型水下机器人阻力性能的数值模拟[C]//2008年船舶水动力学学术会议暨中国船舶学术界进入ITTC 30周年纪念会论文集.北京,中国,2008:1-6.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
中国舰船研究(2022年2期)2022-04-26
航天返回与遥感(2021年5期)2021-11-11
土木建筑与环境工程(2020年4期)2020-09-02
中国科技纵横(2019年5期)2019-04-24
导弹与航天运载技术(2018年3期)2018-12-09
中国舰船研究(2016年6期)2016-12-12
北京航空航天大学学报(2016年5期)2016-11-16
舰船科学技术(2014年4期)2014-03-08
环球时报(2009-11-06)2009-11-06
