
基于动态限的周期非稳定工况的实时故障检测模型
2014-11-15 05:54王天真汤天浩
电工技术学报 2014年12期
王天真 吴 昊 刘 萍 张 健 汤天浩 杨 鸣
(1.上海海事大学电气自动化系 上海 200135 2.法国海军学院研究所 SIG课题组 布雷斯特 29240)
1 引言
随着现代科学技术的进步和生产的发展,各种大型复杂系统变得日益复杂,系统的可靠性、可维护性、安全性越来越受到人们的关注。许多故障检测方法应运而生。这些故障检测技术大致可以分为基于解析模型的故障检测方法和基于数据的故障检测方法。其中基于解析模型的故障检测方法得到了深入的研究。但在实际情况中,常常难以获得对象的精确数学模型,这就大大限制了基于解析模型诊断方法的使用范围和效果。而基于数据的故障检测方法不需要对象的精确数学模型,而且具有某些“智能”特性,因此是一种很有生命力的方法。最常用的两种基于数据的故障检测方法:主元分析法(Principal Component Analysis,PCA)和部分最小二乘法(Partial Least Square,PLS)[1-3],它们大都针对稳定工况,并且模型是固定的。递归主元分析(Recursive PCA))[4]和指数加权主元分析(Exponentially Weighted Principal Component Analysis,EWPCA)[5]等算法能自适应地更新控制限,它们主要针对缓慢时变的工业过程监控。个别统计方法如多方向主元分析(Multiway Principal Component Analysis , MPCA)、独立分量分析(Independent Component Analysis, ICA)和核主元分析(Kernel Principal Component Analysis, KPCA)等虽然能在系统非稳定工况下进行故障检测,但检测精度不是很高[5]。然而实际工业过程往往工作在非稳定工况下。而故障发生在非稳定工况下的概率极高。以船舶为例,船舶在大海中的紧急加速、紧急倒航、多机多桨、大风浪中航行等非稳定工况下极易发生故障。在非稳定工况下检测数据变化频率较高,变化幅度较大。在这种情况下上述方法都无法进行有效的故障检测[6]。经观察发现非稳定工况中存在周期非稳定工况。周期非稳定工况,是指具有周期性的非稳定工况。例如,塑料制袋机系统的伺服电机工作在周期非稳定工况下,它的运动过程:加速、恒速、减速、低速追色,四个状态组成一个周期。还有就是定时突加突减负载的电机也工作在周期非稳定工况。针对上述问题,本文提出基于动态限的周期非稳定工况的实时故障检测模型,并对模型的实时性和可行性进行了分析。然后将其应用在系统周期非稳定工况的实时故障检测,实验结果表明该模型提高了系统监控的可靠性。
2 基于RPCA的T2统计量检测方法
判断一个多变量系统是否发生异常,可以通过多元统计方法进行多变量降维,找出具有代表性的主元,再采用T2图对其进行检测[7]。如果T2统计量大于控制限则说明有故障[8]。本文采用RPCA[9]方法来提取主元,再对稳定工况和非稳定工况下的数据得到的T2统计量进行鲁棒性分析。
2.1 相对主元分析方法
PCA方法是先通过计算出系统多变量序列构成的数据阵的协方差阵特征值,随后依据特征值的大小来确定各级主元的。当数据呈现分布“均匀”[10]时,就很难提取出有代表性的主元,进而就不能建立主元模型进行故障检测。RPCA方法被提出来解决数据呈现分布“均匀”时的主元提取问题。

相对矩阵XR的协方差矩阵的计算公式为



在RPCA中每个相对主元对系统贡献率的百分比为
根据贡献率的大小及对系统的近似表示程度确定m(m<n)个相对主元,来近似代表系统变量序列构成的数据矩阵XR。
2.2 基于相对主元的控制限算法
基于相对主元分析方法的HotellingT2统计量的表达式为
根据T2统计量控制限的计算公式,可得到相对主元分析方法的T2统计量控制限,这里用表示为

式中,α为检验水平。置信度(1-α)通常选取95%或是99%,或α=0.05或0.1。是对应于检验水平α,自由度为j,k-j条件下F分布的临界值。
3 基于动态限的故障检测模型
本文提出的基于动态限的周期非稳定工况的实时故障检测模型包括:RPCA数据降维;数据拟合;构建动态限;结合动态限进行数据变换;经变化后数据与动态限相比较给出检测结论。本节用正常的周期非稳定工况的历史数据构建动态限。基于动态限的故障检测模型故障监控流程如图1所示。本节还对该模型故障检测的实时性和可行性进行了分析。
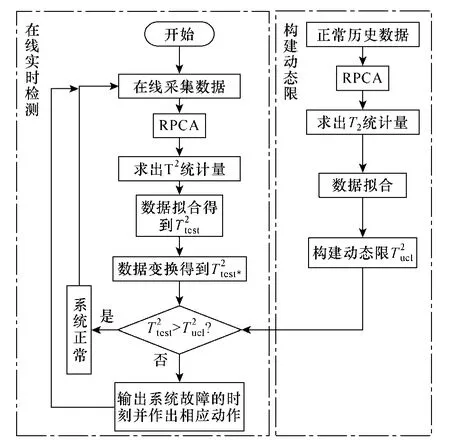
图1 故障监控流程图Fig.1 Flow chart of fault monitoring
3.1 数据拟合
在系统非稳定工况下,其多变量参数的幅值变化较大,采用相对主元分析后得到的T2统计量波动也比较大,为了便于后面的分析,需要对T2统计量采用拟合方法进行预处理[11]。针对周期非稳定工况系统,本文主要采用多项式拟合和分段多项式拟合方法。拟合要达到的目标需结合后面的方法介绍。
3.2 构建动态限
T2统计量的控制限是利用F分布进行计算的,在稳定工况下,当T2<时系统是稳定的,然而在系统非稳定工况下,多变量参数经过RPCA变换后得到的相对主元振幅变化比较大,而T2统计量给出的检测限是一条恒定的直线,容易出现漏检或误警,在后续的实验分析中可见。因此本文构建动态限对周期非稳定工况进行故障检测。
定义1:动态限:提供系统在非稳定工况下进行多元统计分析时T2统计量的故障检测界限。
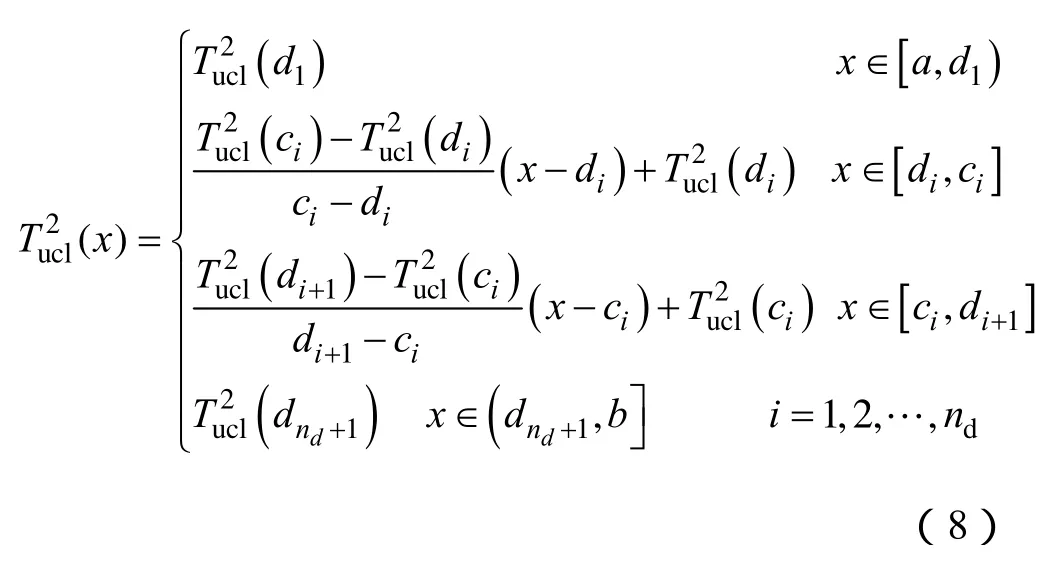
根据HotellingT2统计量能够反映出PCA或RPCA模型内部多变量的变化情况,本文采用系统正常非稳定工况下产生的T2统计量来构建一条动态限。[a,b]为一个周期的长度。将[a,b]区间分解成式(8)所表达的多个段。
3.3 数据变换
选择系统非稳定工况的一个周期长的采样数据Xtest。首先采用相对主元分析方法得到主元,并根据式(6)产生相应的T2统计量,再采用分段多项式拟合处理。经拟合处理后保留下来的那些较为突出的点为曲线的极大值点和极小值点,本文称之为峰值点和谷值点。利用峰谷点得到(x) x∈。则曲线上的谷值点和峰值点分别为拟合预处理使得具有和同样数目的峰值点和谷值点。

对于一条含有多个峰值点和谷值点的曲线,本文定义为峰谷线。峰谷线的表达形式比较多,本文采用的峰谷线表达式为
定义2:同峰谷:设任意两条峰谷线,在区间[a,b]上,若它们的峰值点和谷值点个数分别相同,则称为同峰谷分布。在这里,检测数据经拟合处理后为,它与曲线满足同峰谷分布,接下来对曲线进行横移变换分析。
横移变换的具体步骤如下:

(4)将步骤(1)~(3)获得的新的坐标点连接起来构成的一条直线段称之为横移线如图2所示,其中横坐标为采样点。
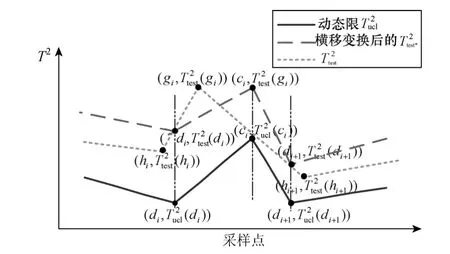
图2 横移变换示意图Fig.2 The horizontal shift of
性质1:横移变换不改变检测数据线上峰值的大小,只改变峰值点的位置。
3.4 检测的实时性分析
[10]显示相对主元分析后产生的T2统计量具有较强的鲁棒性,使得本文提出的方法具有实时检测的可能。经分析演绎,本文推导出周期非稳定工况下T2统计量的如下性质。
性质3:周期非稳定工况下的数据,其对应的T2统计量也是周期性的。推导过程如下。

性质3使得数据的实时检测成为可能。只需知道系统在正常运行时一个周期长的历史数据。并用此数据计算出T2统计量,构建动态限。因为T2统计量是周期的,则动态限也是周期的。可以将动态限扩展形成整个时间段的动态限。并用此动态限与实时检测数据T2统计量相比较,给出检测结论。
3.5 模型的可行性分析
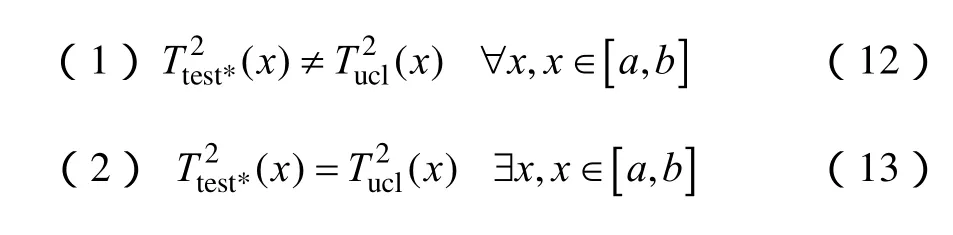
由T2分布知,。而无故障的周期非稳定工况下的与构建动态限,存在如下的约束:
证明:
根据横移变换分析知
根据式(18)和式(19)得

4 实时故障检测的应用

并与约束1相结合得

本文采用例1中他励直流电动机起动过程中的三个参数:电压u、电枢电流ia和转速nr,采样周期样本数为80。根据定义1,本文以负载转矩TL=0.2的T2统计量来构建一条动态限,图3为动态限的构建过程。
再由性质1知

并与约束2相结合得

最后,根据式(16)和式(17)得

又知

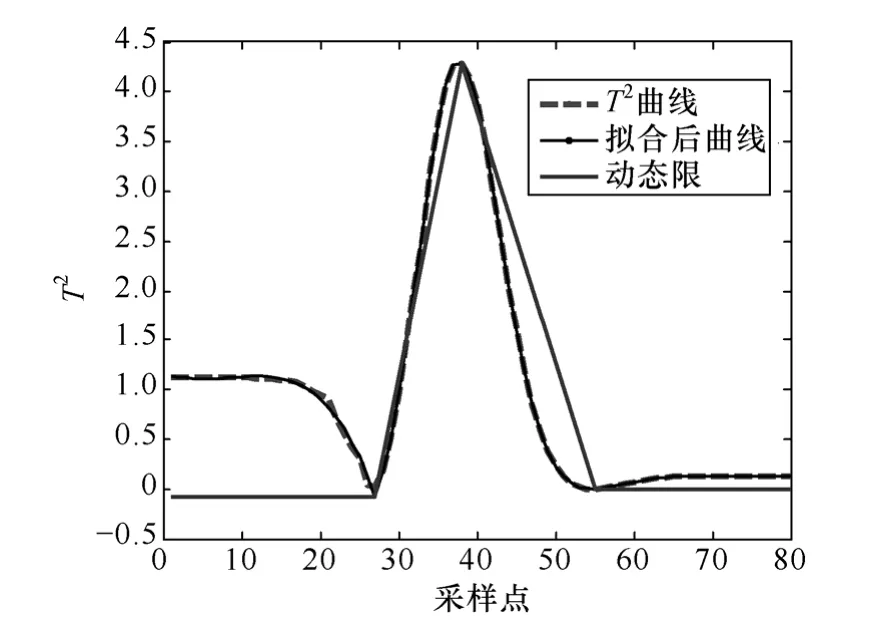
图3 动态限的构建过程Fig.3 The construction process of dynamic limit
而当TL<0.2时,认为电机是正常起动,当TL>0.2时,则认为电机系统发生故障。以此来判断TL=0.0和TL=0.3时,电机系统起动过程是否发生故障。在这里取正常和异常非稳定工况下各三组不同实时数据。
本文主要通过衡量故障检测方法好坏的2个重要标准进行比较分析:误报率(正常过程采样序列中报错点与采样点的比值)和漏检率(故障过程采样序列中漏报点与采样点的比值)[12]。下表给出了周期非稳定工况的实时故障检测模型和传统基于RPCA的故障检测方法的比较结果,同时图4和图5给出了两种方法的仿真结果图。
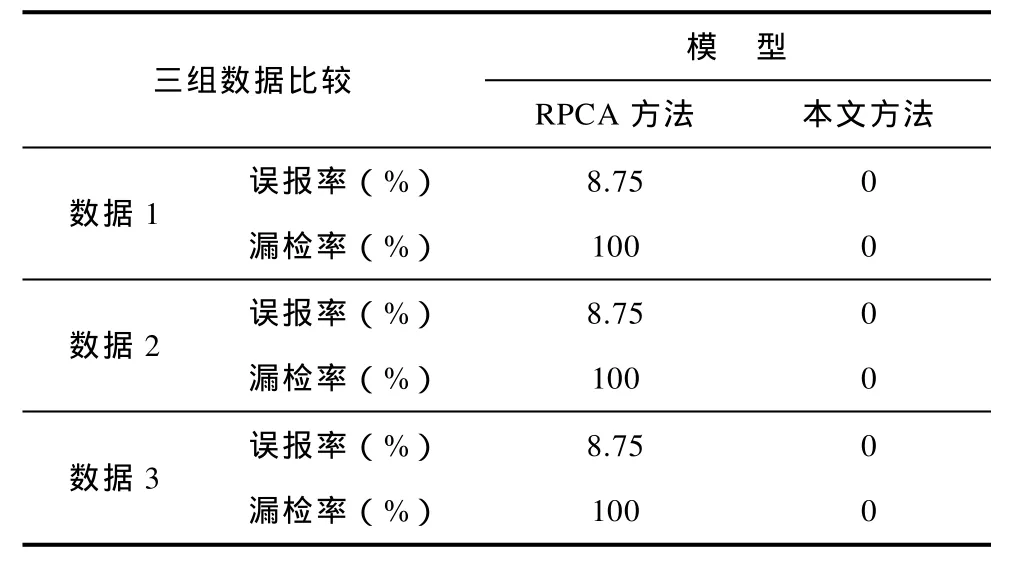
表 两种方法的比较结果Tab. The comparative results of two methods
从图4可以看到采用RPCA方法不能进行有效的进行故障检测,而从图5和上表中可以得知,实时数据的采样个数尽管各不相同,但都能通过周期非稳定工况的实时故障检测模型正确的判断系统是否发生故障,因此,对系统周期非稳定工况的实时数据进行相对主元分析后,得到的第一相对主元的T2统计量。采用周期非稳定工况的实时故障检测模型,可以对系统周期非稳定工况进行有效的故障检测。
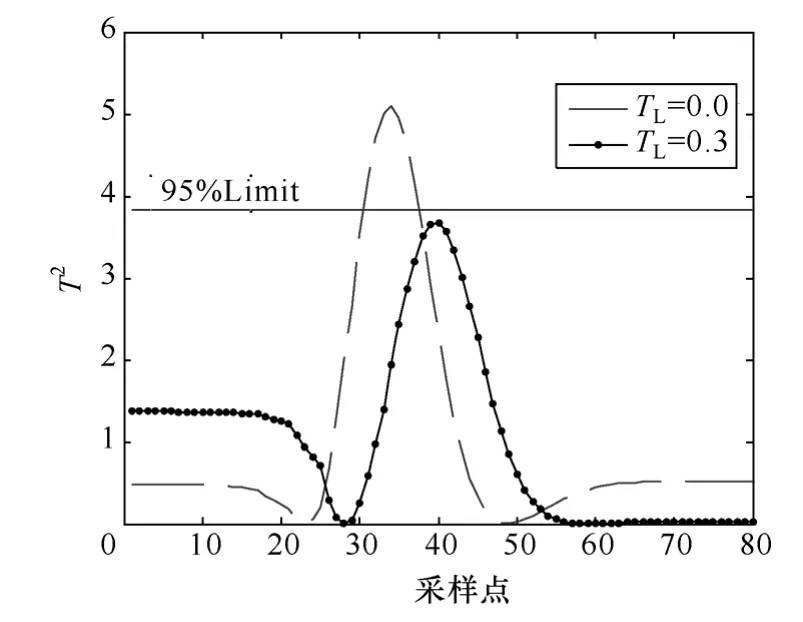
图4 RPCA故障检测Fig.4 RPCA for fault detection

图5 周期非稳定工况的实时故障检测模型Fig.5 Real-time fault detection model under the periodicnon-steady condition
5 结论
传统的T2图给出的控制限是一条恒定的直线,无法对非稳定工况下的故障进行有效的检测。本文分析了周期非稳定工况的特点,推导出一些性质,提出一种基于动态限的周期非稳定工况的故障检测模型。并对该模型进行可行性分析。实验结果显示该模型可用于周期非稳定工况的实时故障检测,与传统方法相比,检测精度高,误报率少。
参考文献
[1]Gallagher N B, Wise B M, Bulter S W, et al.Statistical process control tools for a semiconductoreach process: improving robustness through modelupdating[J]. Proceeding of the ADCHEM 97, Banff,Canada, 1997: 78-83.
[2]Wang Xun, Uwe Kruger, Lennox Barry, et al. Recursivepartial least squares algorithms for mointoring complexindustial process[J]. Control Engineering Practice,2003, 11(6): 613-632.
[3]Wold S. Exponentially weighted moving principalcomponent analysis and projection to latent stuctures.chemometrics and intelligent laboratory systems[C].Proceedings of the 3rd Scandinavian Symposium onChemometrics, Aprial, 1994: 149-161.
[4]Weihua Li, H HenryYue, Sergio Valle_Cervantes, etal. Recursive PCA for adaptive process monitoring[J].Journal of Process Monitoring, 2000, 10(5): 471-486.
[5]Lane S, Martin E B, Morrios A J, et al. Application ofexponentially weighted principal component analysisfor the monitoring of a polymer film manufacturingprocess[J]. Transactions of the Institute of Measurementand Control, 2003, 25(1): 17-35.
[6]Xun Wang, Uwe Krugerb, Barry Lennox. Recursivepartial least squares algorithms for monitoring complexindustrial processes[J]. Control Engineering Practice,2003(11): 613-632.
[7]Chen J H, Liu J L. Mixture principal componentanalysismodels for process monitoring[J]. Industrialand Engineering Chemistry Research, 1999, 38(4):1478-1488.
[8]Ding S, Zhang P. On the Application of PCA techniqueto fault diagnosis[J]. Journal of Tsinghua University(Science and Technology), 2010, 15(2): 138-144.
[9] 文成林, 胡静, 王天真, 陈志国. 相对主元分析及其在数据压缩和故障诊断中的应用研究[J]. 自动化学报, 2008 34(9): 1129-1140.Wen Chenglin, Hu Jing, Wang Tianzhen. RelativePCA with applications of data compression and faultdiagnosis[J]. Acta Automatica Sinica, 2008, 34(9):1129- 1140.
[10] 王天真, 汤天浩. 相对主元分析方法及其在故障检测中的应用[J]. 系统仿真学报, 2007, 19(13): 2889-2894.Wang Tianzhen, Tang Tianhao. Relative principalcomponent analysis algorithm and its application infault detection[J]. Journal of System Simulation, 2007,19(13): 2889-2894.
[11]RothenhagenKai, FuchsFriedrich Wilhelm, Doubly fed induction generator model-based sensor faultdetection and control loop reconfiguration[J]. IEEETransactions on Industrial Electronics, 2009, 56(10):4229-4238.
[12]Castillo Angela, Zufiria Pedro J. Fault detectionschemes for continuous-time stochastic dynamicalsystems[J]. IEEE Transactions on Automatic Control,2009, 54(8): 1820-1836.
猜你喜欢
卫星应用(2022年7期)2022-09-05
卫星应用(2022年3期)2022-05-23
煤气与热力(2022年4期)2022-05-23
卫星应用(2022年1期)2022-03-09
防爆电机(2021年5期)2021-11-04
舰船科学技术(2021年12期)2021-03-29
高中数学教与学(2020年21期)2020-11-27
铁道通信信号(2020年1期)2020-09-21
初中生学习指导·提升版(2020年11期)2020-09-10
环球慈善(2019年6期)2019-09-25
