一种单矢量风洞天平校准系统设计
2014-11-21 00:42湛华海吕治国王设希褚卫华
实验流体力学 2014年1期
湛华海,张 旭,吕治国,于 炜,王设希,褚卫华
(1. 中国空气动力研究与发展中心 空气动力学国家重点实验室,四川 绵阳 621000; 2. 中国空气动力研究与发展中心设备设计及测试技术研究所,四川绵阳 621000)
0 引 言
风洞模型试验是飞行器研制过程中了解飞行器性能、降低飞行器研制风险和成本的重要手段之一,风洞天平则是直接感应和测量作用在飞行器模型上气动力和力矩的高精度测量装置。风洞天平技术涉及到天平材料、结构设计分析、加工制造、应变传感器技术和天平校准技术等。天平校准是利用天平校准装置,按照一定的校准方法,建立天平测量信号和所受气动载荷关系的过程,即获取天平公式和天平其它性能参数的过程。由于风洞天平校准关系到天平未来应用中模型气动数据测量的不确定度,所以,风洞天平校准被认为是天平研制过程中的重要环节。近年来,美、欧等发达国家在不断追求风洞试验数据精细化的过程中,天平校准技术有了新的发展和进步。
激波风洞是进行高超声速飞行器气动力地面试验的重要设备,其模型气动载荷测量的装置主要是压电天平。它是利用压电材料受力后在其表面产生电荷的压电效应原理来测量作用在模型上的空气动力载荷,主要用在脉冲型风洞中进行模型测力试验。压电天平具有频率响应快,刚度大,灵敏度高,载荷范围宽等特点,但是缺点是低频特性差。
1 压电天平校准原理
由于压电天平低频特性较差,其静态校准与应变天平有很大的差异。一是压电天平的静态校准是一个动态的测量过程,加载( 或卸载) 后,天平输出的是一个阶跃信号;二是为了避免在加载过程中施加砝码时的“过冲”,压电天平的校准多采用卸载法,即首先对天平施加好载荷,在释放掉电荷后,采用熔断丝线的方法或人工快速托起砝码的方法突然卸掉天平上的载荷,这时天平上产生与加载数值相等、符号相反的电荷量。图1 是一种压电天平校准的单点卸载多元校准设备示意图。在天平的加载架上斜置一根钢丝,钢丝的延长线与天平坐标轴不相交,钢丝的另一端通过滑轮挂上一定质量的砝码,滑轮可以在某一平面内做两自由度运动,用测量钢丝上A、B 两点的空间坐标,再通过空间矢量分解原理可计算出施加在天平上的六个分量的载荷。校准时,每变化一次滑轮位置,测量一次钢丝上两点的空间坐标,然后,卸载一次,如此反复进行,即可完成对压电天平的校准。
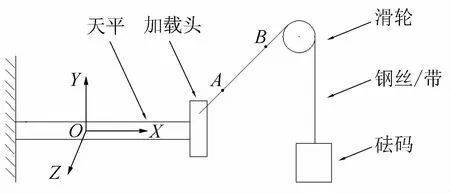
图1 压电天平校准原理示意图Fig.1 Schematic diagram of piezoelectric balances calibration theory
2 单矢量天平校准系统总体设计
系统设计为卸载式六分量自动校准系统,采用单矢量多元校准方式实现压电天平自动校准。具体为:通过加载头给天平悬挂一静重式砝码,然后通过机构调整天平姿态及加载点位置,将砝码的铅垂载荷变换为相对于天平轴系而言的矢量载荷,通过力的分解与坐标的转换,变换为所需要的六自由度载荷。根据压电天平动态响应的特点,校准采用突然卸载的方法,实现载荷阶跃。即先将砝码加载于天平上,然后由机构带动天平和砝码做匀速直线下降运动,在砝码碰撞到地面时,实现砝码载荷的瞬间卸载。天平校准原理如图2 所示。它是通过天平姿态调整机构改变天平与钢带之间位置,由角编码器数据计算加载载荷空间矢量位置关系,从而进行单矢量载荷的分解实现六分量加载。单矢量六自由度天平校准系统的特点在于结构简单,系统误差源少,校准精度和效率高。
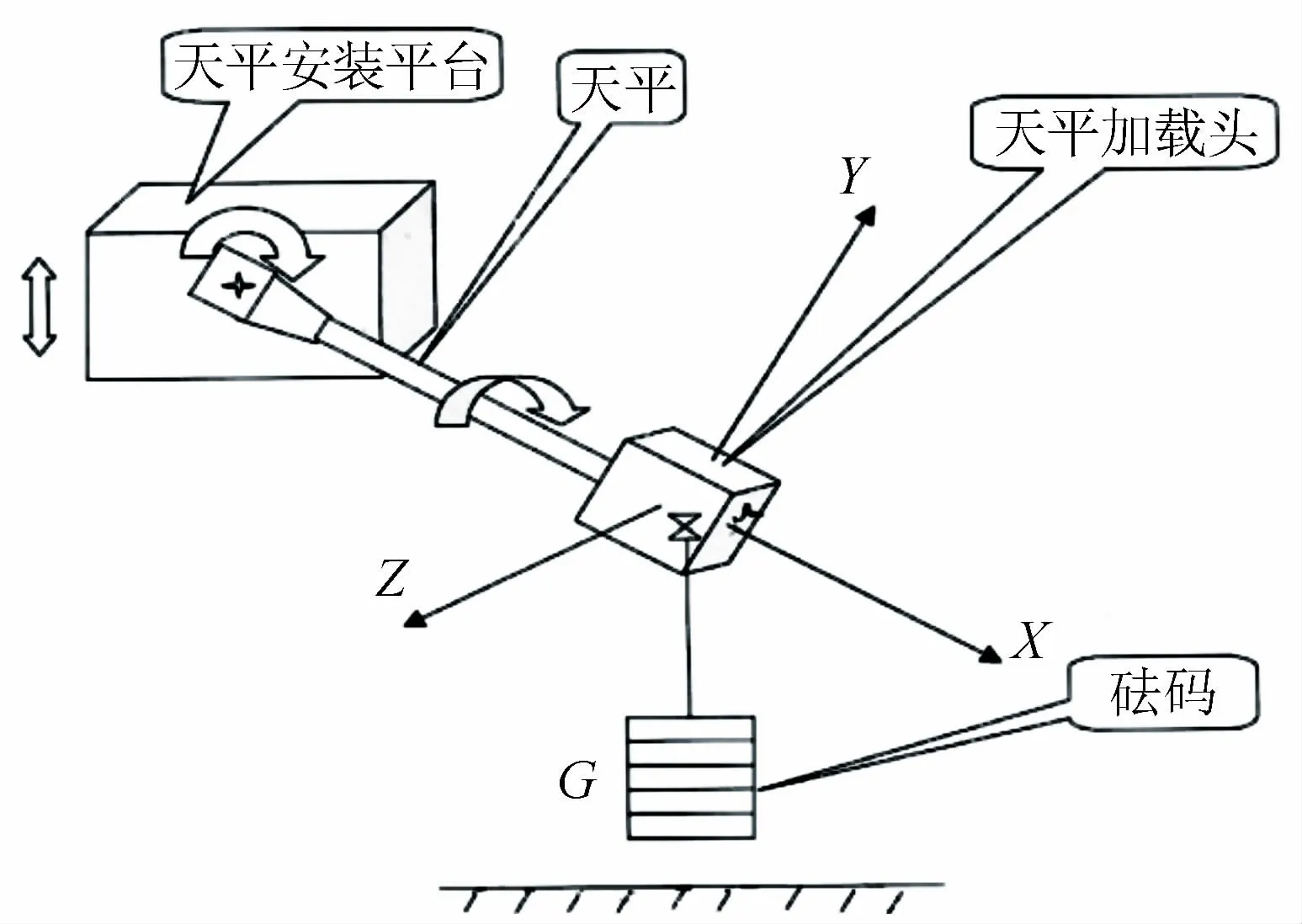
图2 单矢量六自由度天平校准系统结构示意图Fig.2 Structure schematic diagram of the single vector six-component balance calibration system
系统由校准架主体结构、砝码加载分系统、控制分系统、天平数据采集分系统和数据处理分系统等组成。系统构成如图3 所示。可以实现对压电天平进行六自由度校准。通过碰撞的方式能在30ms 的时间内实现载荷的快速卸载。校准系统具有以下功能:(1) 有不同的天平支杆接口满足不同形式天平的需要;(2) 加载头能够实现0°,90°和180°方向的自锁;(3) 在设计载荷范围内,天平支杆能够进行滚转和俯仰范围内的角度改变;(4) 数据采集系统可以完成天平及角位移传感器数据的实时采集、显示及存储;(5) 控制系统和数据处理软件能够满足天平校准和数据处理的要求,给出天平校准数据。
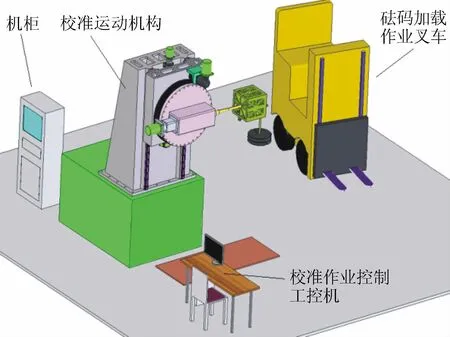
图3 单矢量六自由度天平校准系统组成图Fig.3 Composing diagram of the single vector sixcomponent balance calibration system
3 系统结构设计
结构设计遵循“稳定可靠、操作便利、性价比高、使用效率高”的原则开展。系统结构主要包括校准架主体结构( 即天平姿态调整及运动机构) 、砝码加载装置、碰撞装置以及相关附件等部分。
3.1 校准架主体结构设计
3.1.1 机构设计
校准架主体结构是具有3 个自由度的运动装置。其功能主要是实现天平滚转姿态调整、天平俯仰姿态调整、天平及砝码升降运动。由两组旋转运动机构和一组直线机构组成,为串联式组合结构,如图4 所示。
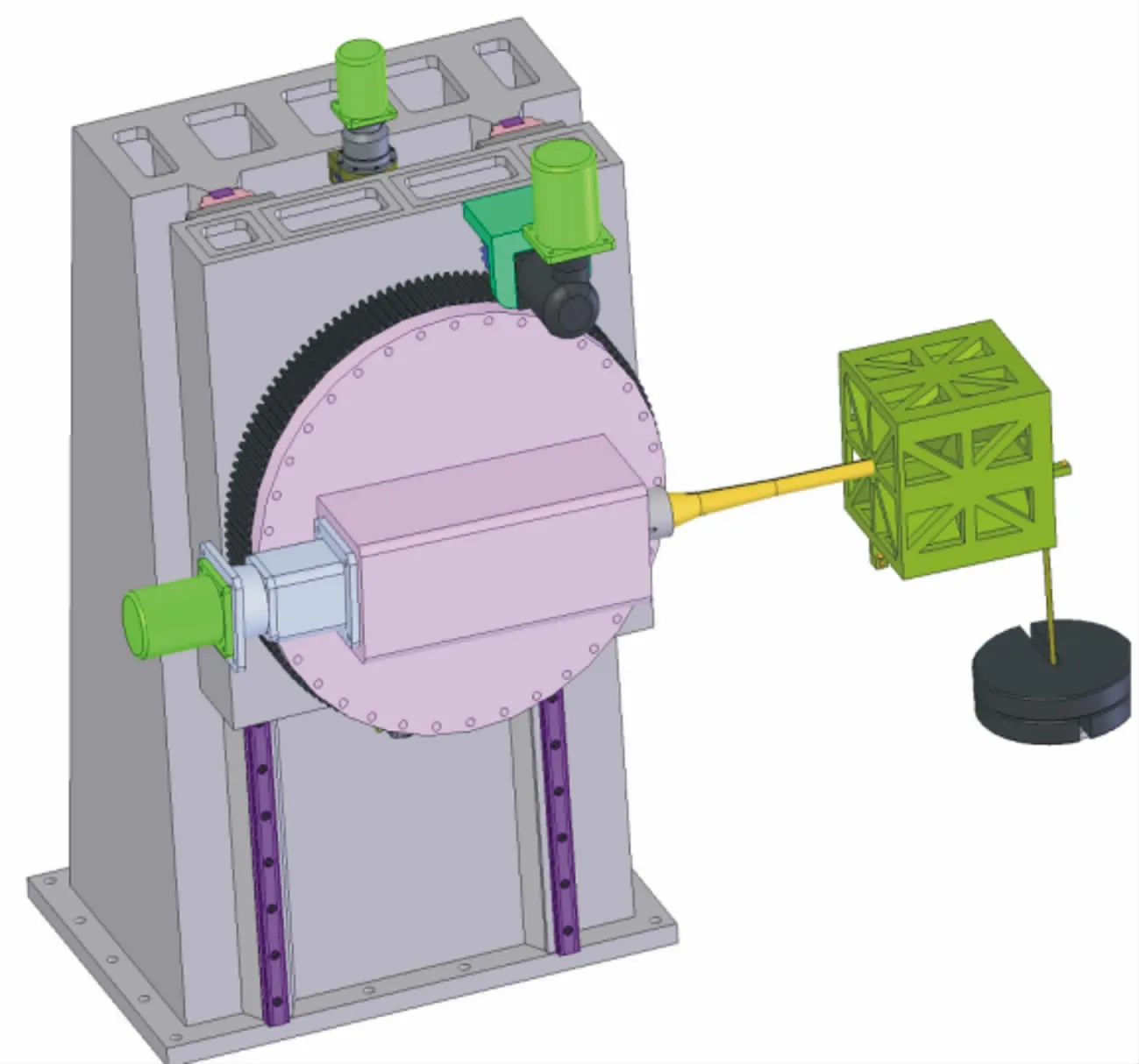
图4 校准架主体结构Fig.4 Main structure of the calibration system
天平滚转姿态调整机构由伺服电机带动大减速比的高精度减速机直接驱动。轴体前端通过支杆转换接头,实现与天平支杆连接。支杆转换接头可满足不同天平支杆形式压电天平的校准需求。
天平俯仰姿态调整机构采用的是专业三排圆柱滚子组合转盘轴承,与小齿轮配合,实现俯仰运动。三排圆柱滚子组合转盘轴承各种载荷由不同滚道和滚子组承受,在同等受力条件下,轴承的直径可大大缩小,使主机更为紧凑;在同等尺寸下,承载能力大幅提高。此种结构形式承载能力强,可实现大俯仰力矩、高精度运动。传动机构经减速机、齿轮副两级减速。齿轮副采用小模数齿轮,高精度齿面加工,可实现高精度控制。
天平及砝码升降运动机构采用高精度直线滚动导轨副作运动机构,由高精度滚珠丝杆螺母副进行驱动和控制,实现平稳的直线运动。直线导轨长度要满足机构启动、加速、平稳直线运动、碰撞、减速、停车系列动作在内的操作。直线滚动导轨副的滑块与导轨之间的滑动摩擦变为滚动摩擦,大大降低二者之间的运动摩擦力,从而获得动、静摩擦力之差很小,随动性好;驱动信号与机械动作滞后的时间间隔极短,有益于提高系统控制的响应速度和灵敏度,系统运行稳定可靠。同时能实现无间隙运动,提高了机械系统的刚度。
3.1.2 刚度计算与分析
由于天平校准的特殊性,要求天平校准架刚度应尽可能高。天平校准系统升降台体及基座应具有良好的强度和刚度。设计中对结构受力变形进行了有限元分析计算,结果如图5 所示。在最大设计载荷下,由升降台体及基座的变形引起的位移变化在0.06mm左右。
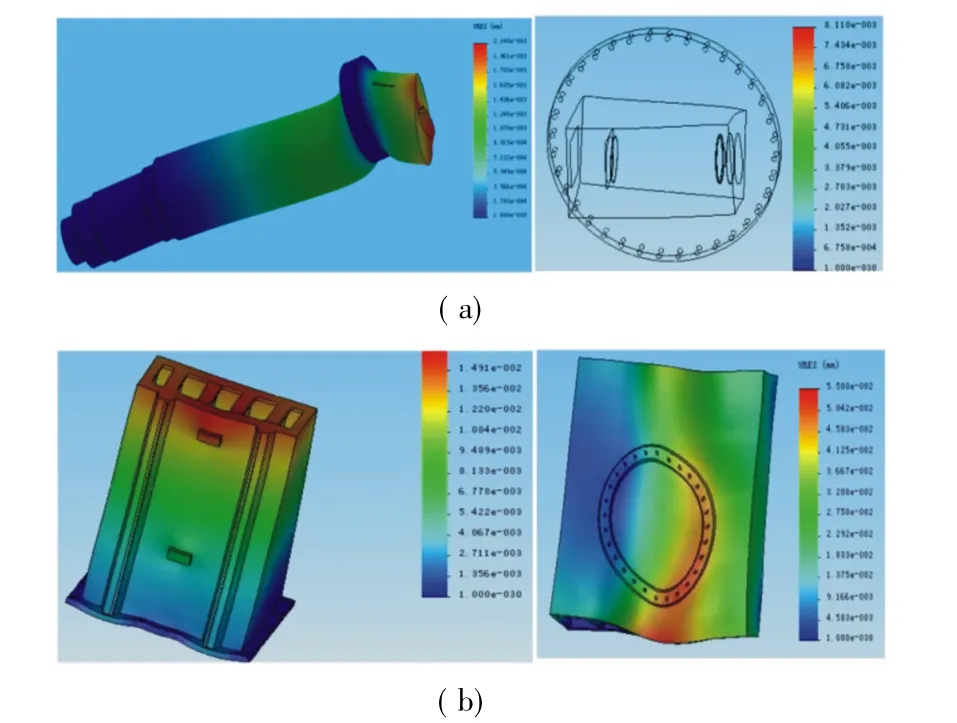
图5 校准架主体结构变形有限元分析Fig.5 Finite element analysis of main structure of the calibration system
3.2 砝码加载机构设计
砝码加载机构主要是实现天平校准时载荷的加/卸载。包括天平加载头、钢带/钢丝挂载装置、砝码、叉车、碰撞钢板等。考虑到本系统中有大质量砝码,砝码加载采用电动叉车加载方式,提高工作效率,降低劳动强度。
根据不同校准量程,系统配备多套天平加载头,以实现优化设计。低量程使用铝制加载头、大量程使用钢制加载头。加载头设计为套筒式结构,内部有可沿轴向滑动的套筒,同时兼做天平转换接头。实现不同接头尺寸、不同轴径、不同长度天平的校准。加载头在垂直天平轴线端面和平行天平轴线的另外一面上均布置多个加载点。
为使砝码在规定时间内卸载,除了对校准架主体结构升降运动的速度有要求,同时,还要求碰撞尽量是刚性接触。因此,砝码卸载时,地面与砝码接触部分设计为钢板,并凸出地面。为使碰撞产生的振动对其它设备影响尽可能小,碰撞钢板地基与周边基础之间设计有隔震带。经验证试验,采用钢板碰撞方式,卸载时间可控制在20ms 内。
4 测控系统设计
测控系统主要实现校准装置的运行控制以及天平信号采集、处理。包括控制分系统、数据采集/处理分系统。设计中根据功能的独立性将两系统分离,以实现高可靠性和抗干扰。框图如图6 所示。
4.1 控制分系统设计
控制分系统用于控制校准系统的运行,以及调整天平在安装平台上的姿态位置。所有的操作能实现计算机程控操作,同时也能实现手动操作。控制系统主要由计算机,控制机柜和伺服驱动系统等组成。

图6 测控系统总体框图Fig.6 Collective frame diagram of the measurement and control system
4.1.1 控制分系统工作过程
本校准系统的控制过程为:用户通过上位工业控制计算机或者HMI 人机界面向运动控制器发送姿态调整命令。运动控制器接收到命令后,其内置的运动控制单元按照一定的控制算法控制伺服电机运转。在调整的过程中,通过监测编码器判断是否调整完成。然后,用户通过使用砝码加载作业叉车给砝码加载。在加载完成后,控制平台升降的电机使天平和加载头平行匀速向下移动,当砝码盘接触到地面前的瞬间,运动控制器产生触发信号启动数据采集,当数据采集完成后,通过控制系统发出命令,天平及砝码直线运动停止。通过PXIe 嵌入式计算机读取数据,这样就完成了一个点的校准。然后天平及砝码通过直线运动回复到初始位置,进行下一个校准运动,如此循环。最终经过数据处理完成对一台天平的校准。
4.1.2 控制分系统设计
天平校准系统要求高的精度,而且要求姿态调整机构能够将天平的位置调整到所需的状态。在满足精度要求后,要求测量系统尽快完成数据采集和处理功能。为了减少控制对测量系统的干扰性,充分利用工控机很强的数据处理能力和方便的用户控制界面编制能力,测控系统总体构成遵从“操作管理集中、单元控制独立、测控系统隔离、系统信息共享”的设计思路,在本项目设计中,将测量和控制系统分离。
控制系统主要包括两个部分:上位工业控制计算机,运动控制系统。上位工业控制计算机的主要作用是:(1) 上位控制计算机是姿态调整系统、数据采集系统的控制界面,负责将有关姿态调整控制操作命令通过工业以太网传输给PLC 控制系统,实现电机动作的启停;可触发测量系统数据采集; 负责与测量系统通信。(2) 负责天平校准过程中姿态调整过程的实时监测,一方面能在线显示用于控制天平姿态调整电机的运动状态,另一方面要对电机运动和数据采集过程的故障和异常状态进行报警和处理。运动控制系统的主要作用是:(1) 天平姿态调整。通过控制两组独立的伺服电机,驱动姿态调整机构使得天平在俯仰和滚转方向进行转动,使得天平的姿态满足校准要求。(2) 实现砝码的快速卸载。控制平台升降的电机可以快速启动,并迅速达到匀速运动的状态,保持加载头平稳快速下降。( 3) 安全联锁。设计中采用两级安全连锁装置。第一级限位开关通知控制系统软件停机,第二级限位开关实现断电处理。
4.2 天平信号采集分系统设计
天平数据采集及数据处理分系统主要是对校准过程中天平信号进行采集和数据处理,得到天平校准公式和天平校准不确定度。
4.2.1 数采系统硬件设计
天平数据采集及处理系统包括多通道电荷放大器、多通道高速数据采集设备、工控机、数据采集软件、数据处理软件等部分。结构如图7 所示。
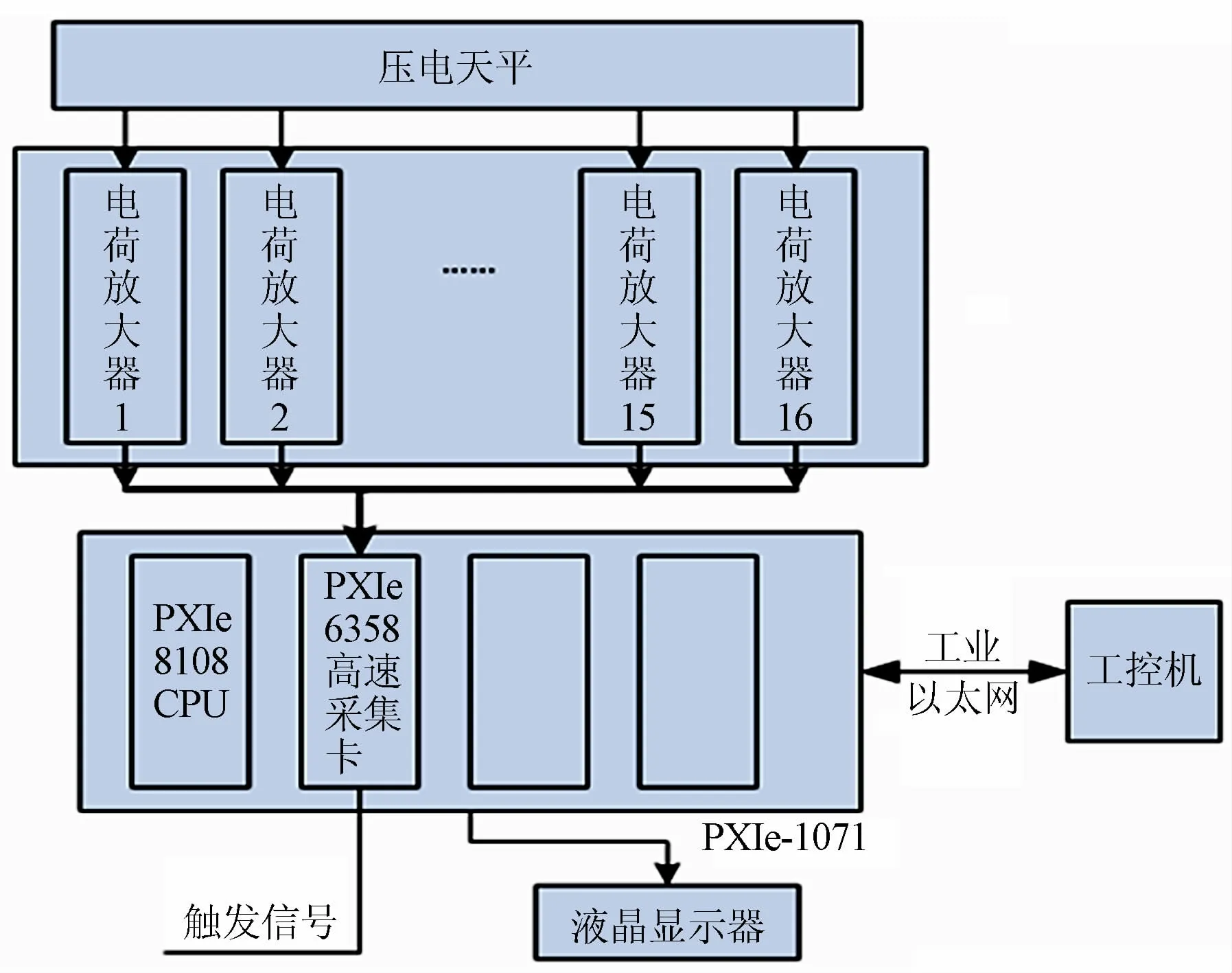
图7 天平信号数采系统框图Fig.7 Frame diagram of the balance signal data acquisition system
电荷放大器选用的是DAQP-CHARGE-B/单通道静态、动态电荷放大器模块。它的作用是将压电天平产生的电荷信号进行调理放大,使之转换为±5V 的电压信号,供高速数据采集卡采集。为了满足16 通道同步测量的要求,我们将16 个放大器模块安装在DEWE-30-16 机箱中,构成16 通道电荷放大器。
16 通道高速采集系统使用NI 的PXIe 嵌入式系统。PXIe 嵌入式系统的作用是: 驱动高速数据采集卡工作,通过PXI Express 总线将数据保存在内存,进而保存在硬盘中。PXIe 嵌入式系统由以下几部分组成:带有4 个插槽的机箱,Core 2 Duo 2.53GHz 的中央处理器,X 系列的多功能数据采集卡。采集卡自带16 个同步模拟输入,48 个数字IO 端口。每个模拟输入通道的采样率达到1.25Mb/s,分辨率达到16bit,输入信号为±5V 时绝对误差为0.1%,且因为PXIe嵌入式系统使用了PXIe 总线技术,可以将采集到的数据快速保存到硬盘上,满足了试验对精度和速度的需求。
4.2.2 天平信号数据处理软件设计
单矢量六自由度天平校准系统对天平的校准过程采用的是多分量综合加载方法,即多元校准方法。多元校准方法是用多元组合加载的方法来确定天平的校准公式。它是在天平校准时,对天平各分量以不同的组合方式同时施加载荷,并求得天平校准公式的方法。与单元校准方法相比较,多元校准方法更能真实地模拟天平的工作状态。
校准数据处理根据最小二乘原理,采用逐步回归分析方法求解。天平的校准公式为:
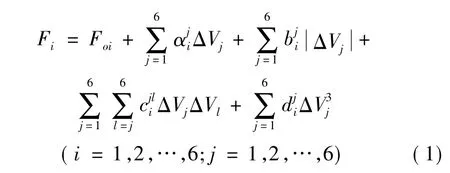
式中:Fi 为天平第i 个分量的载荷测值; ΔV i 为第i个分量电压输出值。
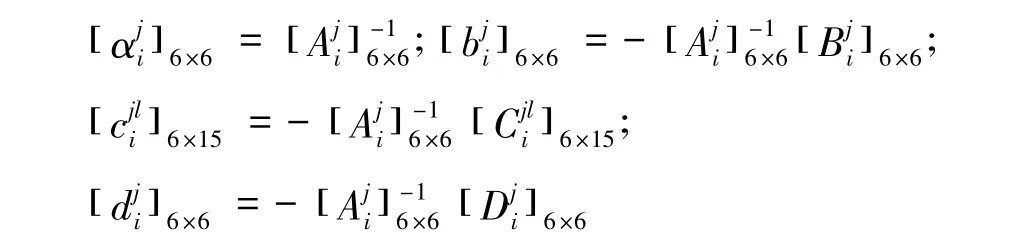
通过数据处理和变化,就可得到矩阵形式的天平工作公式:
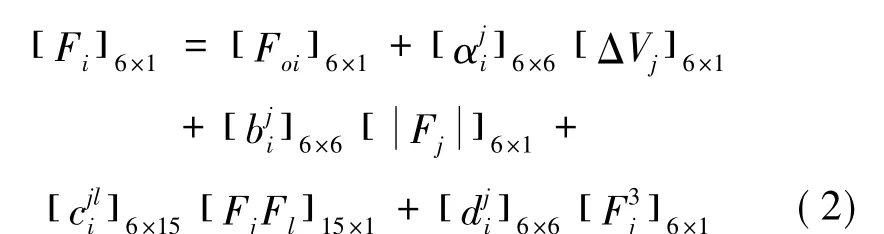
式中:

软件平台选择: 上位工业控制计算机和PXIe 嵌入式系统使用NI 的labview 开发平台,而PLC 控制则使用西门子Step7 开发平台。
5 结 论
(1) 采用伺服电机带减速装置进行天平姿态调整,可以实现天平与加载钢带之间的空间位置关系准确变换,并结合加载架上挂点的合理设计,满足校准所需矢量载荷的加载需求;
(2) 通过精密直线滚动导轨,采用匀速运动碰撞钢板的方式,可实现载荷的瞬间卸载,满足压电天平信号采集需求;
(3) 单矢量六自由度天平自动校准系统结构简单、误差源少,结合多元校准方法,可实现风洞天平高效率、高精度校准。
[1] Dennis Booth. Automatic balance calibration system (ABCS)upgrades[R]. AIAA-2013-0419.
[2] Jones Shirley M,R hew Ray D. Recent developments and status of the langley single vector balance calibration system[R]. NASA report,2004.
[3] Lux James,Boas Amy,Li Samuel. System for automated calibration of vector modulators[R]. NASA report,2009.
[4] Parker P A,Ferris A T. Single vector calibration system for multi-axis load cells and method for calibrating a multiaxis load cell[R]. NASA report,2003.
[5] DeLoach R. A comparison of two balance calibration model building methods[R]. AIAA-2007-147.
[6] 贺德馨. 风洞天平[M]. 北京: 国防工业出版社,2001.
[7] GJB2244-2011 风洞应变天平规范[S]. 北京: 国防科工委军标出版发行部,1995.
[8] 冯世军. 涡轮发动机动力模拟器校准箱天平校准技术研究[J]. 实验流体力学,2006,(2) : 90-93.
[9] 王朝安. 一个全自动的风洞天平校准系统[J]. 流体力学实验与测量,1998,(1) : 92-96.
[10]王爱玲. 风洞应变天平自动校准设备研制[R]. CARDC报告,2010.
[11]江桂清. 天平校准的数据处理与误差分析[G]//风洞天平技术论文集,1998.
[12]江桂清. 气动天平多元校准方法[G]//风洞天平技术论文集,1998.
猜你喜欢
仪表技术与传感器(2022年4期)2022-05-31
军民两用技术与产品(2021年8期)2021-11-24
陶瓷学报(2021年4期)2021-10-14
陶瓷学报(2021年3期)2021-07-22
商品与质量(2021年7期)2021-04-02
陶瓷学报(2020年6期)2021-01-26
中学生数理化·七年级数学人教版(2020年4期)2020-08-10
小哥白尼(野生动物)(2020年3期)2020-07-27
———重庆建成世界一流汽车风洞
汽车零部件(2019年7期)2019-08-16
数学大王·中高年级(2018年11期)2018-12-17