
伺服机构负载模拟系统设计与动态特性分析
2014-12-02 02:24付永领郭彦青祁晓野
北京航空航天大学学报 2014年9期
张 朋 付永领 郭彦青 祁晓野
(北京航空航天大学 机械工程及自动化学院,北京100191)
伺服机构是火箭运行姿态控制的执行装置.为了满足伺服机构的研制与生产的需要,负载模拟系统的研制至关重要,它可以被用来模拟火箭飞行过程中伺服机构的负载情况,主要包括惯性负载、弹性负载、摩擦负载和常值力矩[1-6].
伺服机构地面负载模拟器发展至今,按加载方式不同分为电动加载、液压加载和机械加载[1].电动式负载模拟器结构简单,对小力矩信号跟踪能力强;液压加载负载模拟器具有加载力矩大、体积小、调整灵活等优点,但其加载过程中存在多余力现象[7-10],目前,关于这类负载模拟器的研制更多的也是关注于多余力的消除控制算法的研究上;机械式负载模拟器加载精度较高,加载方式简单,没有多余力,但以往此类模拟器模拟的伺服机构负载特征较固定,负载调整灵活性差,且对于发动机喷管的柔性特性模拟不足.
针对伺服机构负载地面模拟,本文提出了一种结构简单、操作方便、模拟负载调整灵活,可以实时监测摩擦力矩以及弹性力矩负载大小,同时能模拟伺服机构负载多自由度特性的机械式负载模拟系统.通过对模拟器中的负载在一定范围内的调整,可以较准确地复现伺服机构实际工作过程中的动态特性.
1 模拟对象
伺服机构用于推动火箭发动机喷管摆动,喷管铰接于安装座,并由一些具有弹性的元件支撑,简化原理如图1所示.一般情况下喷管有两个摆动自由度,在相互垂直的两个方向上,两个伺服机构可单独运动也可同时运动,使喷管实现不同姿态的调整.伺服机构由伺服阀、作动筒以及液压源等组成[11].作为喷管的姿态控制系统,其性能的优劣直接决定了火箭的运行状态,在地面对伺服机构综合性能的考察中,需要准确模拟其负载特征.
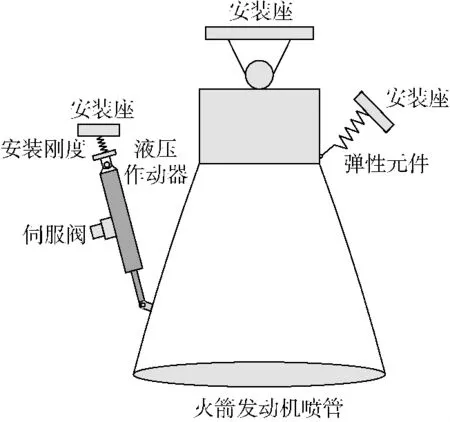
图1 伺服机构推动火箭尾喷管结构简图Fig.1 Structure diagram of servo mechanism to push launch vehicle engine
火箭发动机喷管的结构复杂,工作过程中各种因素的耦合,使喷管体现出一种复杂的动力学状态.
在实际的工作过程中,伺服机构输入与喷管摆角输出在动态响应上呈现出双谐振峰特性[11],如图2所示.文献[7,11]对此作了研究,认为双谐振峰中的第1个谐振峰频率主要由伺服机构安装刚度影响;第2个谐振峰频率主要由发动机喷管自身柔性影响.负载模拟器的目标是在地面提供一个较为真实的综合负载环境,以此复现伺服机构系统实际工作时的动态特性,从而对伺服机构系统的性能进行评估或结构改进.
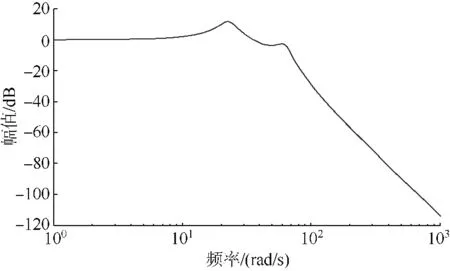
图2 伺服机构负载频率特性Fig.2 Frequency characteristic of servo mechanism
2 负载模拟系统结构模型
根据图1中分析,伺服机构工作需要克服火箭发动机喷管的结构惯性力、弹性元件在喷管摆动过程中产生的弹性力、摆动轴处的摩擦力以及火焰产生的常值力.考虑到常值力对系统的影响不大[7],图 1 中未标出.
建立原理如图3所示的机械式伺服机构地面负载模拟系统,主要包括惯量盘、弹性力矩弹簧板、摩擦力矩加载机构、伺服机构支撑刚度弹簧板和喷管柔性模拟质量块.另外还有液压控制元件、伺服放大板和力矩传感器等.
2.1 惯性负载
惯性负载的模拟采用对称式质量圆盘实现.为了满足负载模拟器转动惯量微调的要求,可以在原质量圆盘的基础上对称增加质量块灵活调整.惯性负载模拟结构原理如图3所示.
2.2 摩擦力矩负载
摩擦力矩负载的模拟采用机械抱轴的方式实现.对称布置的两个非对称液压缸推动摩擦片,使其对转动主轴产生正压力,当主轴转动时,摩擦片与主轴之间产生干摩擦,反映在主轴上为摩擦力矩.调整液压缸进油口压力,改变摩擦片与主轴之间的正压力,可以实现摩擦力矩大小的调节.摩擦力矩加载结构原理如图3所示.
2.3 弹性力矩负载
弹性负载力矩采用悬臂弹簧板的方式实现.简化原理图如图4所示.拨叉结构设计刚度较大,随着主轴转动,弹簧板一端由夹持机构固定,另一端随拨叉摆动,同时该端装有滑动轴承可以在拨叉内滑动.当主轴旋转时,弹簧板在拨叉的作用下产生弯曲变形,反应在主轴上的反力作为弹性负载.改变夹持点的位置,可实现弹簧板刚度系数的调节以满足可调弹性力矩的要求.
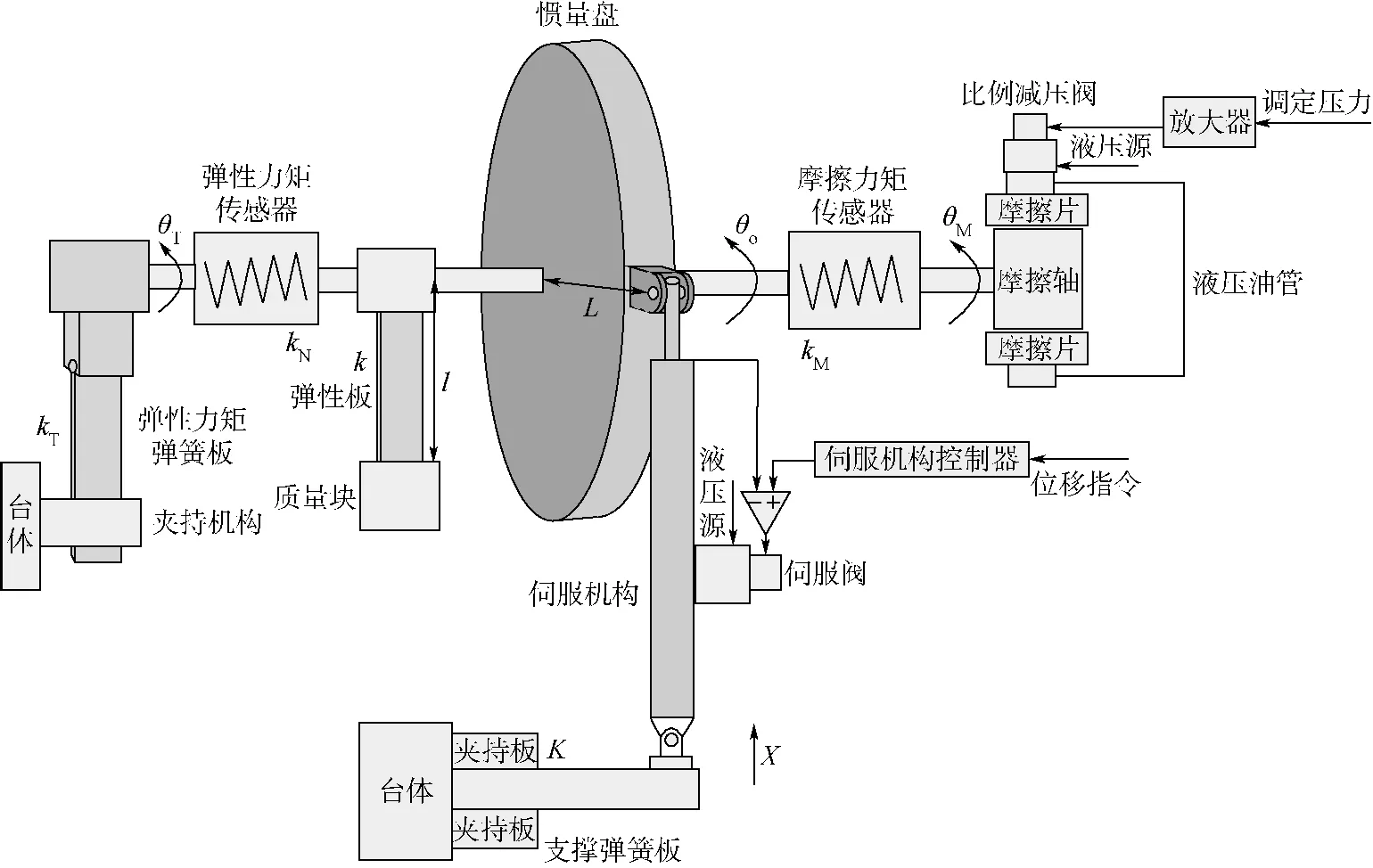
图3 伺服机构负载模拟系统原理图Fig.3 Principle of load simulation system
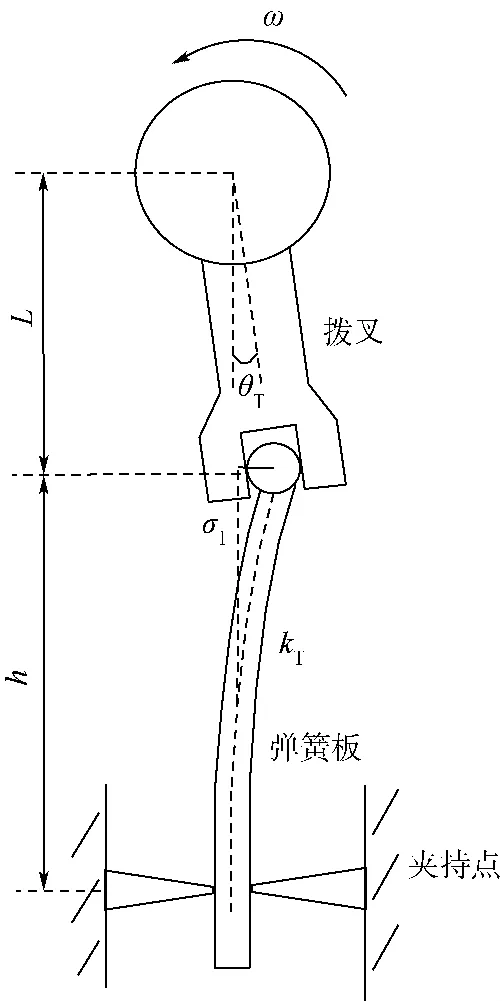
图4 弹性力矩加载结构简图Fig.4 Structure diagram of elastic torque loading device
计算弹性力矩弹簧板刚度:

式中,E为弹簧板弹性模量;I为弹簧板截面的面积惯性矩;h为夹持点到主轴轴心的距离.
2.4 支撑刚度
伺服机构安装刚度同样采用悬臂弹簧板的方式实现.弹簧板一端由夹持机构固定,另外一段悬臂且伺服机构安装座固定于上表面.改变夹持机构夹持点的位置,即可实现支撑弹簧板刚度数的调节,简化原理图如图5所示.
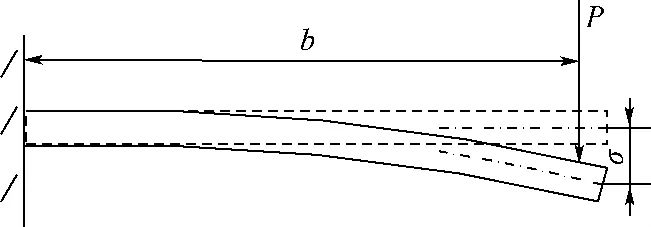
图5 支撑刚度简化图Fig.5 Support stiffness adjusting device
根据定义,产生单位位移所需要的力即为支撑弹簧板刚度,对于支撑刚度的计算:

式中,P为伺服机构安装座反力;σ为支撑弹簧板右端挠度;b为伺服机构安装座到夹持点的距离.
2.5 喷管柔性
火箭发动机喷管结构柔性的模拟采用弹簧板加质量块的方式实现.弹性钢板一端与主轴固定连接,另一端固定连接质量块,简化原理图见图6a,根据其物理结构,等效力学模型见图6b.
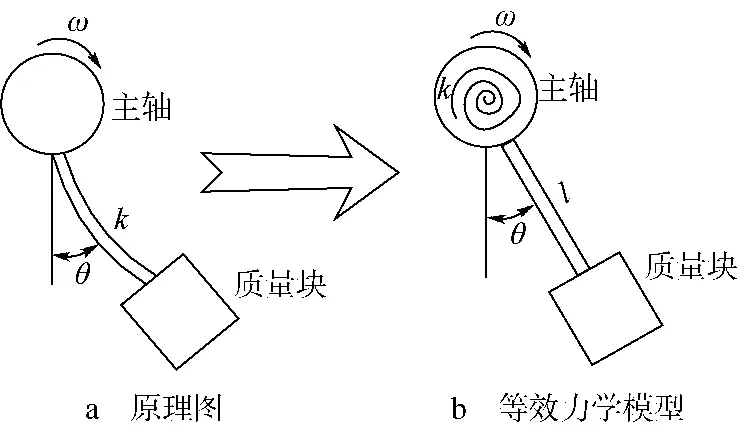
图6 喷管柔性模拟等效简图Fig.6 Equivalent diagram of flexibility simulation for launch vehicle engine
等效力学模型中,对于连接弹簧板长度一定的情况下,扭簧的扭转刚度计算为

式中l为主轴轴心到质量块质心的距离.
3 系统数学模型的建立
根据设计的负载模拟器结构,建立伺服机构在负载模拟器上工作的数学模型,包括被试伺服机构系统数学模型、伺服阀数学模型、传感器和放大器数学模型.
3.1 被试伺服机构系统数学模型
伺服阀的流量方程:

式中,XV为伺服阀阀芯位移;QL为伺服阀输出流量;Kq为伺服阀流量增益系数;Kc为伺服阀流量压力系数;PL为系统工作压力.
伺服机构为对称液压缸,缸体力平衡方程:

式中,At为活塞有效工作面积;mT为缸体的质量;C0为伺服机构液压阻尼系数;x为缸体位移,图3中标示方向X为正;xg为活塞杆位移,图3中标示X方向为正.
伺服机构活塞杆力平衡方程:

式中,m为活塞杆的质量;F为负载力.
当弹性力矩弹簧板刚度系数kT远小于弹性力矩扭矩传感器的刚度系数kN时,忽略扭矩传感器刚度的影响.当所加载的摩擦力矩较小时,可忽略摩擦力矩扭矩传感器的刚度kM的影响.考虑到摩擦力矩值较小,在数学模型上不考虑摩擦非线性,按照主轴运动方向的不同加载恒值力矩.

式中,J为惯量盘转动惯量;Mc为摩擦力矩;L为伺服机构力臂;θ0为惯量盘转动角度,θ0=xg/L.
喷管柔性模拟质量块力平衡方程:

式中,Jz为质量块转动惯量;Bz为机械阻尼系数;θ为柔性弹簧板转动角度.
伺服机构连续流量方程为

式中,QL1为伺服阀输出流量;Csl为伺服机构的总泄漏系数;Vt为伺服机构容腔总体积;Ey为液压油的弹性模量.
3.2 伺服阀传递函数
在整个伺服系统的计算中,常把伺服阀看成一阶或二阶环节.当动力机构固有频率低于50 Hz时,伺服阀的传递函数可简化为一阶环节,高于50 Hz时简化为二阶环节[12-15].这里简化为

式中,Kv为伺服阀的流量增益;ωv为伺服阀的固有频率;ξv为伺服阀的阻尼比.
3.3 其他环节传递函数
伺服放大器动态可以忽略,其输出电流为

式中,Ka为伺服放大器增益;Ue为偏差信号.
位移传感器方程为

式中,Kf为位移传感器增益;xc为活塞杆的绝对位移.
3.4 伺服机构负载模拟系统框图
被试伺服机构是以活塞杆位移为输出的位置闭环系统,根据式(4)~式(12),建立伺服机构系统数学模型框图,如图7所示.
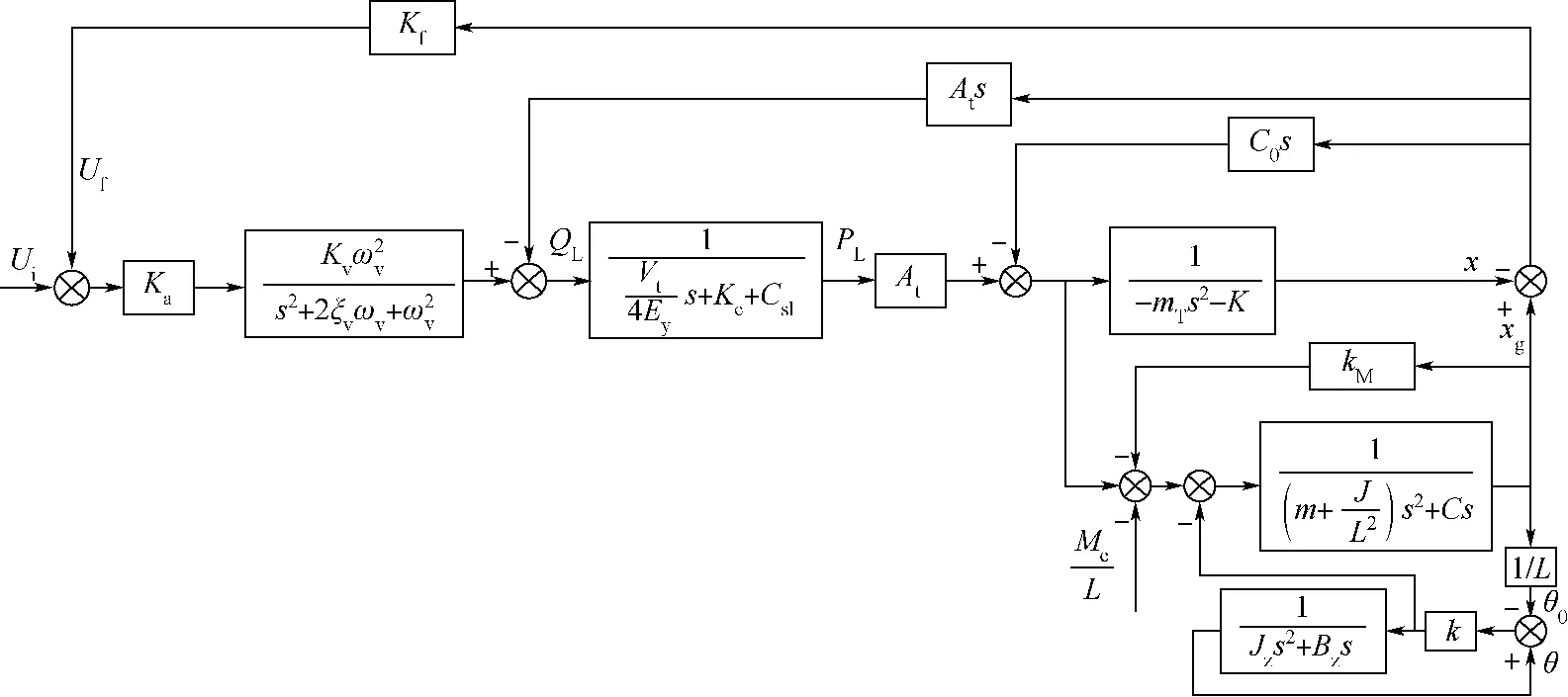
图7 伺服机构负载模拟系统框图Fig.7 Block diagram of load simulation system
4 仿真分析及实验验证
设计的地面负载模拟系统是为了模拟伺服机构的负载特征,执行机构是伺服机构,伺服机构为阀控对称缸,其部分参数见表1.

表1 伺服机构负载模拟系统参数Table 1 Parameters of load simulation system
为了较准确地实现载荷模拟,负载模拟器对于惯性负载、弹性负载、摩擦负载、支撑刚度以及发动机喷管柔性模拟提出了可调节的设计要求.通过调节各种负载的大小,使同一个伺服机构在负载模拟器上和在真实喷管上的动态特性具有一致性.
伺服机构在做地面动态特性实验时,扫频信号作为伺服机构的输入信号,负载模拟器主轴角位移作为输出测量信号.摆角输出在动态响应上呈现出双谐振峰,根据负载变化对动态特性影响的仿真分析可知,影响第1个谐振峰频率和幅值的负载主要有弹性负载和惯性负载;影响第2个谐振峰频率和幅值的负载主要有喷管柔性模拟质量块和惯性负载.
图8为喷管柔性模拟质量块对系统波特图的影响.当负载模拟器转动惯量J=144.5 kg/m2,弹性力矩弹簧板刚度kT=300 N·m/(°),摩擦力矩Mc=200 N·m,伺服机构支撑刚度 K=5 MN·m/rad时,质量块惯量Jz变化对系统二阶谐振频率和幅值有明显的影响,而对于一阶谐振频率基本没有影响.
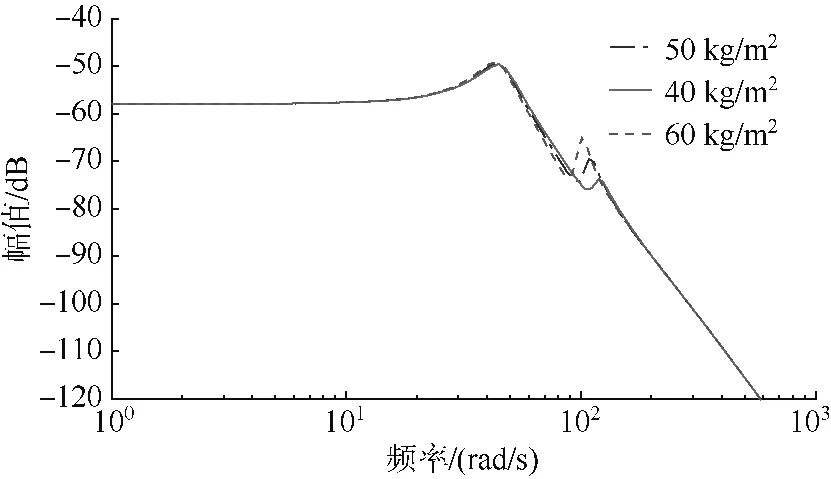
图8 Jz变化时的系统波特图Fig.8 Bode diagram of closed-loop system in changing Jz
图9为弹性力矩弹簧板刚度kT变化时系统波特图.当单独调整弹性力矩弹簧板刚度时,系统一阶谐振频率前后移动,幅值也有所变化,而二阶谐振频率基本没有变化.
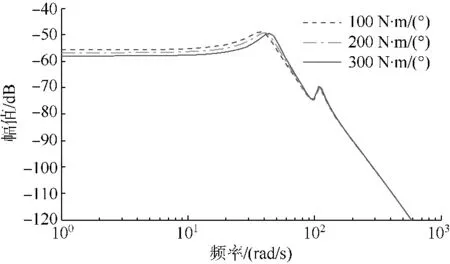
图9 kT变化时系统波特图Fig.9 Bode diagram of closed-loop system in changing kT
图10为转动惯量J变化时系统波特图.仅调整负载模拟器转动惯量,系统一阶频率发生了前后移动,幅值也小幅度的变化,而二阶谐振点谐振频率基本没有变化,但二阶谐振频率的幅值上下移动.
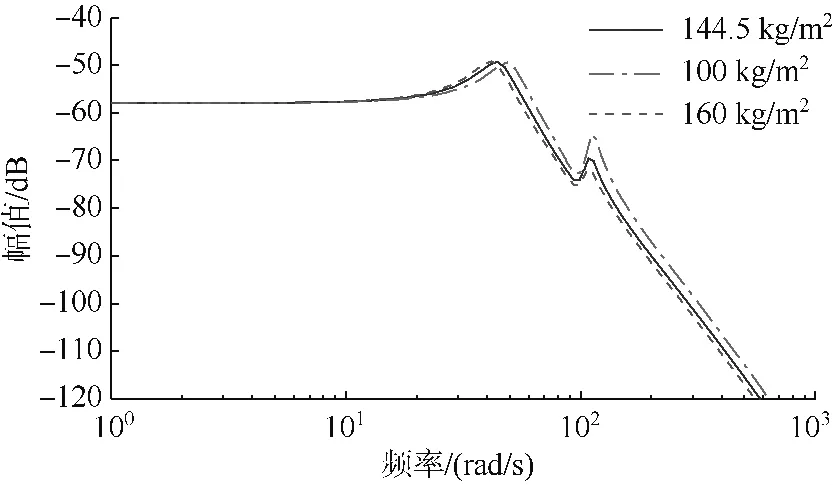
图10 J变化时系统波特图Fig.10 Bode diagram of closed-loop system in changing J
根据以上仿真分析的结论,在实验台上,伺服作动器作幅值为±3.42 mm的扫频,质量块转动惯量Jz分别调整为50,60 kg/m2.系统扫频波特图如图11所示.
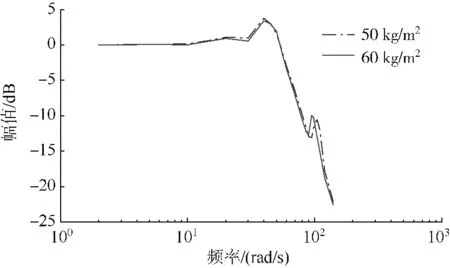
图11 实验台扫频测试频率特性Fig.11 Magnitude-frequency characteristic of experimental station
实验结果可知,在喷管柔性模拟质量块惯量Jz=50 kg/m2时,第2谐振峰频率为105 rad/s,转动惯量为60 kg/m2时,第2谐振频率为98 rad/s.在实际的物理系统中非线性因素影响较多,而在仿真过程中,除了线性化简化建模引起的误差,还有模型参数取值与实际真值的偏差,使仿真结果与实验结果在频率点大约有5 rad/s的偏差,幅值上大约有0.9 dB的偏差,但趋势基本吻合,验证了伺服机构负载模拟系统的简化数学模型的正确性.同时实验表明,通过调节负载模拟器中的负载,同一伺服机构在负载模拟器上的动态特性较好地与其在喷管上的动态特性吻合.说明此种形式的结构设计是合理的.为伺服机构地面实验提供了较为真实的负载环境.
5 结论
1)针对伺服机构负载多自由度特性模拟问题,提出了一种可模拟双谐振峰的负载模拟系统,通过机械的方式完成伺服机构惯性负载、摩擦负载、弹性负载、支撑刚度以及喷管柔性的模拟.
2)对负载模拟系统进行了数学模型的推导和仿真分析,讨论了负载模拟系统中弹性负载、转动惯量和喷管柔性模拟质量块对实验整体系统幅频特性的影响.
3)最后,通过实验验证了所设计的负载模拟系统,调整可变负载可以复现伺服机构实际工作过程的动态特性,验证了所建立的数学模型的正确性以及机构设计的合理性,为类似负载模拟系统的研制提供了理论基础和设计思路.
References)
[1]延皓,李长春,陈策.伺服机构综合负载模拟试验系统[J].兵工学报,2012,33(5):588-593 Yan Hao,Li Changchun,Chen Ce.Comprehensive load simulation system of servo mechanism[J].Acta Armamentarii,2012,33(5):588-593(in Chinese)
[2]张洁,孙凝生.运载火箭伺服机构负载模拟与空载特性间的转换传递函数[J].航天测控,2002,18(2):12-16 Zhang Jie,Sun Ningsheng.The transfer function between servo sector load of launch vehicle load and no-load characteristics[J].Aerospace Control,2002,18(2):12-16(in Chinese)
[3]郝经佳,赵克定,许宏光.刚度、惯量负载对电液负载仿真台性能影响的研究[J].中国机械工程,2002,13(6):458-460 Hao Jingjia,Zhao Keding,Xu Hongguang.Study on the influence of rigidity and inertia in electro-hydraulic load simulator[J].China Mechanical Engineering,2002,13(6):458-460(in Chinese)
[4]华清.电液负载模拟器关键技术的研究[D].北京:北京航空航天大学,2001 Hua Qing.Study on the key technology of electro-hydraulic load simulator[D].Beijing:Beijing University of Aeronautics and Astronautics,2001(in Chinese)
[5] Clark S,Corbett M.The design of a T5 thruster load simulator for spacecraft system AVI[C]//Proceeding of Space Propulsion 2004-4th International Spacecraft Propulsion Conference.Sardinia,Italy:IEEE,2004:797-802
[6]焦宗夏,华清,王晓东,等.负载模拟器的评价指标体系[J].机械工程学报,2002,38(11):26-30 Jiao Zongxia,Hua Qing,Wang Xiaodong,et al.Estimation for performance of load simulator[J].Chinese Journal of Mechanical Engineering,2002,38(11):26-30(in Chinese)
[7]孙萌,李长春,延皓,等.多自由度伺服机构负载模拟系统动态特性研究[J].兵工学报,2013,34(3):378-384 Sun Meng,Li Changchun,Yan Hao,et al.Study on dynamic performance of multiple-DOF servo mechanism's load simulator system[J].Acta Armamentarii,2013,34(3):378-384(in Chinese)
[8] Shang Y X,Jiao Z X,Wang X D,et al.Study on friction torque loading with an electro-hydraulic load simulator[J].Chinese Journal of Aeronautics,2009,22(6):691-699
[9] Truong D Q,Kwan A K,Yoon J I.A study on force control of electric-hydraulic load simulator using an online tuning quantitative feedback theory[C]//Control Automation and Systems International Conference.Piscataway,NJ:IEEE,2008:2622-2627
[10]尚耀星,吴帅,焦宗夏,等.基于极限性能要求的电液负载模拟器多刚度与非线性复合数学模型[J].航空学报,2009,30(7):1332-1340 Shang Yaoxing,Wu Shuai,Jiao Zongxia,et al.Electro-hydraulic load simulator based on ultimate performance requirements and the mathematical models with nonlinear[J].Acta Aeronautica et Astronautica Sinica,2009,30(7):1332-1340(in Chinese)
[11]朱晓敏,延皓,孙萌.多自由度伺服机构负载模拟系统建模与实验研究[J].兵工学报,2011,32(5):602-606 Zhu Xiaomin,Yan Hao,Sun Meng.Modeling and experimental investigation of load simulator of multiple DOF servo mechanism[J].Acta Armamentarii,2011,32(5):602-606(in Chinese)
[12]华清,焦宗夏,王晓东,等.电液负载模拟器的精确数学模型[J].机械工程学报,2002,38(11):31-35 Hua Qing,Jiao Zongxia,Wang Xiaodong,et al.Complex mathematical model of electro-hydraulic torque load simulator[J].Chinese Journal of Mechanical Engineering,2002,38(11):31-35(in Chinese)
[13]王占林.液压伺服控制[M].北京:北京航空学院出版社,1987 Wang Zhanlin.Hydraulic servo control[M].Beijing:Beihang University Press,1987(in Chinese)
[14]刘长年.液压伺服系统的分析与设计[M].北京:科学出版社,1985 Liu Changnian.Analysis and design of the hydraulic servo system[M].Beijing:Science Press,1985(in Chinese)
[15]李洪人.液压控制系统[M].北京:国防工业出版社,1990 Li Hongren.Hydraulic control system[M].Beijing:National Defense Industry Press,1990(in Chinese)
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
小哥白尼(趣味科学)(2021年6期)2021-11-02
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
当代陕西(2019年24期)2020-01-18
电子制作(2018年1期)2018-04-04
科学与财富(2016年34期)2017-03-23
电子制作(2017年23期)2017-02-02
北京教育·高教版(2016年9期)2016-11-05
装备环境工程(2015年5期)2015-02-28
