
深水水平连接器液压同步控制仿真分析
2014-12-11 03:52姜宇飞赵宏林郑利军李方遒段梦兰罗晓兰
石油矿场机械 2014年3期
姜宇飞,赵宏林,郑利军,李方遒,段梦兰,罗晓兰
专题研究
深水水平连接器液压同步控制仿真分析
姜宇飞1,赵宏林1,郑利军2,李方遒1,段梦兰1,罗晓兰1
(1.中国石油大学(北京)海洋油气研究中心,北京102249;2.中海油研究总院,北京100010)
为了保证深水水平连接器能够完成海底管道的连接任务,需采用4个动作同步的液压缸来驱动连接器执行对接动作。为了确保4个液压缸在进给和收缩时始终保持活塞杆的位移同步,设计了分流集流阀同步回路来控制4个液压缸的动作,并利用AMESim软件对同步回路模型进行仿真,得到了4个液压缸的位移同步曲线和流量同步曲线。仿真结果表明:采用分流集流阀进行流量控制,可以有效提高4个液压缸在有偏载情况下的同步精度。
水平连接器;同步控制回路;分流集流阀;AMESim;同步精度
液压控制技术已广泛应用于各种工程机械领域,同步控制作为液压控制技术中的重要课题,由于液压执行机构承受的负载差异、液压系统的泄漏、制造误差等因素而难以实现。因此,设计专门的液压同步回路并进行误差精度分析,对于整个液压系统的设计具有十分重要的意义[1]。
深水水平连接器依靠4个液压缸推动安装工具上的对接板,从而实现海底管道之间的连接。由于深海工作环境复杂,海底管道在连接过程中,4个液压缸承受的外部载荷既不平衡也会随时间变化。因此,有必要设计一套适用于深水水平连接器的液压同步控制回路,以保证4个液压缸的同步性。
1 深水水平连接器工作原理
安装工具是深水水平连接器的组成部分之一,其结构如图1所示,主要由整体框架和对接机构组成。其中,对接机构中包含对接板、液压缸和连接器。

图1 安装工具结构
工作原理:安装工具下放到海底指定位置后,对接板在4个液压缸的作用下,将连接器与海底管道进行对接,实现海底管道之间的连接。
由图1可以看出:整个系统的设计难点在于保证4个液压缸的动作同步。根据同步性设计要求,深水液压同步控制误差不超过1.5%[2]。因此,如何设计液压同步控制回路成为设计整个液压系统乃至设计水平连接器的关键。
2 常见液压同步控制回路的原理与特点
2.1 机械连接式同步回路
机械连接式同步回路是通过机械构件的刚性连接或机械传动的方式,将2个或2个以上液压缸连接成一个整体,从而实现各液压缸的同步控制。
该同步控制回路结构简单、工作可靠,但对负载工况要求较高,如果多个液压缸之间的负载差别较大,偏载现象严重时,会造成活塞杆卡死[3]。故该同步控制回路只适用于同步精度要求不高、同步缸距离近、偏载较小的情况。水平连接器的4个液压缸呈空间立体式分布在海底管道的四周,且各液压缸间距较大,无法通过各液压缸刚性连接的方式实现同步控制。
2.2 节流阀调速同步回路
节流阀调速同步回路是通过调节节流阀的过流截面积来控制进入各液压缸的流量,从而控制各液压缸的输出速度,使其相等,以达到对各液压缸的同步控制[4]。
该同步控制回路受液压油温度和节流阀阀口性能影响较大,因此同步精度较低(5%~10%),同时受误差累积的影响,同步回路运行几次后就需要对节流阀进行阀口调整。水平连接器的工况位于1 500 m水深且其他执行动作较多,无法经常进行节流阀的校准调整,而且5%~10%的同步误差不满足连接器的同步设计要求。
2.3 分流集流阀同步回路
分流集流阀同步回路是利用负载压力反馈原理,补偿负载变化引起的流量变化。通过阀芯两端的弹簧带动阀芯移动,自动调节节流口开度,确保通过2个节流口的流量相等,从而实现各液压缸的同步控制[5-6]。
该同步控制回路不但能承受偏载,进行自动双向同步控制,而且同步精度较高(例如ZTBF2型分流集流阀同步误差仅0.5%~1.5%)。水平连接器的工况复杂,4个液压缸需要在无人工干涉条件下实现双向同步,因此在负载存在一定波动的情况下,由分流集流阀组成的同步控制回路更适合水平连接器。
3 水平连接器同步控制方案
3.1 工作原理
根据深水水平连接器的实际工况,选用分流集流阀组成4缸同步控制回路[7],如图2所示。定量液压泵为整个液压系统提供动力,溢流阀防止系统过载,三位四通换向阀在主回路中同时控制4条液压支路的进出油方向,以确保液压缸活塞杆的伸出与收缩,分流集流阀调节进出4个液压缸的液压油流量,使4个液压缸保持位移同步。

图2 四缸同步控制液压回路
3.2 仿真建模
利用AMESim液压仿真软件进行同步控制回路的仿真模型建立,其中非标准元件分流集流阀需要在HCD中自行建立[8],如图3所示。
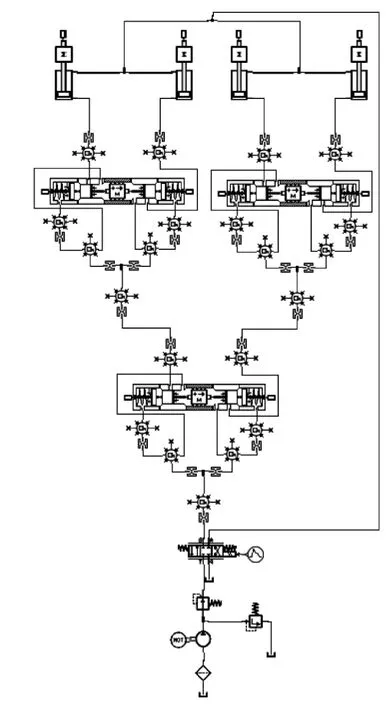
图3 四缸同步控制液压仿真模型
4 同步回路仿真结果分析
为使仿真结果更接近实际情况,仿真过程中选用具有流体压缩性和管道内壁摩擦力的液压管线HL02,仿真时间为90 s,仿真时间间隔0.1 s[9],其余各子模型参数如表1所示。
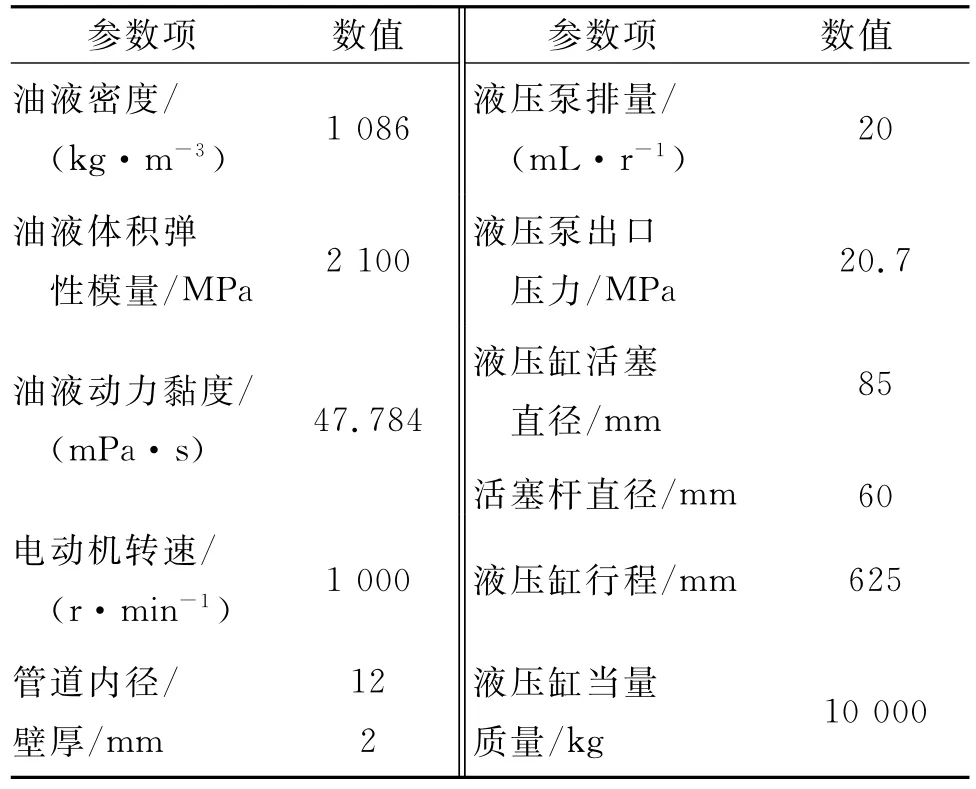
表1 仿真模型参数
1) 未使用分流集流阀且存在偏载工况下,4个液压缸的位移-时间曲线如图4所示。

图4 未使用分流集流阀且存在偏载工况下4个液压缸的位移-时间曲线
由图4可以看出:由于没有分流集流阀的同步控制,同时各个液压缸承受负载不一致(分别为95、100、120、130 k N),因此4个液压缸的位移无法保持同步,且存在较大的差距(198 mm),4个液压缸的动作极不平衡。由于水平连接器对接板需要4个液压缸同时推动,根据4个液压缸的位移差距可求得对接板的偏转角度为6.4°,不符合连接器的设计标准(对接板偏转角度不超过2°),如此大的偏角会造成水平连接器对接动作的卡死。
2) 未使用分流集流阀且不存在偏载工况下,4个液压缸的位移-时间曲线如图5所示。
由图5可以看出:虽然没有分流集流阀的同步控制,但由于各个液压缸承受的载荷一致(为100 k N),因此4个液压缸的位移差距相对较小(约40 mm)。根据4个液压缸的位移差距可求得对接板的偏转角度为1.3°,虽然符合连接器的设计标准(对接板偏转角度不超过2°),但是4个液压缸不存在偏载的工况,只是理想情况。在实际深水环境下,由于海水流动和连接器自重的存在,所以4个液压缸承受的载荷不可能完全一致,因此此种情况并不适用于实际工况。
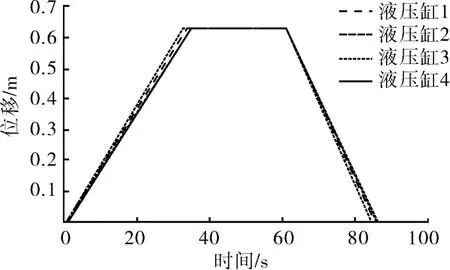
图5 未使用分流集流阀且不存在偏载工况下4个液压缸的位移-时间曲线
3) 使用分流集流阀且存在偏载工况下,4个液压缸的位移-时间曲线如图6所示。

图6 使用分流集流阀且存在偏载工况下4个液压缸的位移-时间曲线
由图6可以看出:虽然各个液压缸承受的载荷不一致(分别为95、100、120、130 k N),但由于有分流集流阀的同步控制,4个液压缸的位移差距非常小(约5 mm)。根据4个液压缸的位移差距可求得对接板的偏转角度为0.16°,符合连接器的设计标准(对接板偏转角度不超过2°),驱动对接板的4个液压缸基本保持同步。由此说明:分流集流阀能够很好地保证进入4个液压缸的油液流量相同,但是受分流集流阀本身制造精度和分流集流阀到各个液压缸之间的管线长度、拐弯角度无法绝对相等等因素影响,4个液压缸的位移会存在较小的误差,但是其同步控制效果已经得到了大幅改善。
4) 使用分流集流阀且存在偏载工况下,4个液压缸进油口的流量-时间曲线如图7所示。
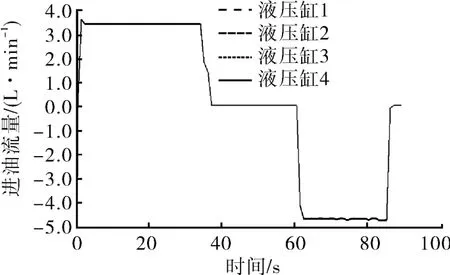
图7 使用分流集流阀且存在偏载工况下4个液压缸进油口的流量-时间曲线
由图7可以看出:虽然各个液压缸承受的载荷不一致(分别为95、100、120、130 k N),但由于有分流集流阀的同步控制,进入各个液压缸的油液流量基本保持一致,其中液压缸1的最大进油流量为4.764 31 L/min、液压缸2的最大进油流量为4.748 56 L/min、液压缸3的最大进油流量为4.734 01 L/min、液压缸4的最大进油流量为4.718 33 L/min。
4个液压缸的同步误差为

式中:δ为同步误差;Qmax为输入液压缸的最大流量,取4.764 31 L/min;Qmin为输入液压缸的最小流量,取4.718 33 L/min。
此同步误差符合水平连接器的设计和实际工作要求,由此可见,分流集流阀组成的同步控制回路很好地保证了水平连接器的动作同步性。
5 结论
1) 设计的液压同步控制回路能够在实际工况下满足水平连接器对同步性要求。
2) 在分流集流阀作用下,液压回路中4个液压缸的动作具有很好的同步效果,同步误差约为0.97%。
[1] 张绍九.液压同步系统[M].北京:化学工业出版社,2010.
[2] Jason Post Curtiss.Deepwater Hydraulic Control System:US,20100084588[P].2010-04-08.
[3] 杨世平,敖沛,胡朝刚.液压起升钻机同步系统的设计[J].石油矿场机械,2008,37(5):43-47.
[4] 曹玉平,阎祥安.液压传动与控制[M].天津:天津大学出版社,2009.
[5] 许立,庞海军,施志辉,等.基于AMESim的液压同步阀集流工况仿真与分析[J].机械科学与技术,2012,31(9):1535-1538.
[6] 安四元.分流集流阀在框架车行走系统中的应用研究[J].机床与液压,2013,41(2):72-95.
[7] 杨月明,常玉连,高胜,等.井口起下油管作业自动化装置试验与液压控制系统仿真[J].石油矿场机械,2013,42(5):8-11.
[8] Peter Chappal.Principles of Hydraulic System Design[M].London:Coxnoor Publishing Company,2003.
[9] 金胜秋.基于AMESim的液压同步阀的仿真分析及结构研究[D].长春:吉林大学,2009.
Hydraulic Synchronization Control Simulation Analysis of the Deepwater Horizontal Connector
JIANG Yu-fei1,ZHAO Hong-lin1,ZHENG Li-jun2,LI Fang-qiu1,DUAN Meng-lan1,LUO Xiao-lan1
(1.Offshore Oil and Gas Research Center,China University of Petroleum(Beijing),Beijing 102249,China;2.CNOOC Research Institute,Beijing 100010,China)
In order to ensure the deepwater horizontal connector to complete the mission of subsea pipeline connection,it needs to use four hydraulic cylinders to drive the connector.In order to ensure the four hydraulic cylinders,piston rods to keep displacement synchronization all the times in feed and shrink process,a dividing-collecting valve isochronous loop was designed to control the four hydraulic cylinders,and the AMESim software were used to simulate the isochronous loop model,and four hydraulic cylinders,displacement curve and rate of flow curve were got.The simulation results show that dividing-collecting valve can control the rate of flow,and it can also effectively increase the four hydraulic cylinders,synchronization precision under the condition of the uneven load.
horizontal connector;isochronous loop;dividing-collecting valve;AMESim;synchronization precision
TE952
A
1001-3482(2014)03-0001-05
2013-09-27
国家科技重大专项“水下管汇连接器样机研制”(2011ZX05026-003-02);国家科技重大专项“深水水下生产设施制造、测试装备及技术”(2011ZX05027-004)
姜宇飞(1987-),男,辽宁沈阳人,硕士研究生,主要从事水下液压传动与控制研究,E-mail:jyfmxl646587@163.com。
猜你喜欢
流体机械(2020年8期)2020-09-15
当代陕西(2019年8期)2019-05-09
制造技术与机床(2017年10期)2017-11-28
石油管材与仪器(2017年4期)2017-09-11
制造技术与机床(2017年2期)2017-05-04
能源(2016年11期)2016-05-17
中国卫生(2015年1期)2015-11-16
中国卫生(2015年8期)2015-11-12
舰船科学技术(2015年8期)2015-02-27
航天返回与遥感(2014年5期)2014-07-31
