
自动泊车系统模型研究与实车验证
2014-12-14 01:37黄显杭朴昌浩
重庆邮电大学学报(自然科学版) 2014年4期
禄 盛,黄显杭,苏 岭,萧 红,朴昌浩
(1.重庆邮电大学模式识别及应用研究所,重庆400065;2.重庆长安新能源汽车有限公司,重庆400023)
0 引言
自动泊车系统是一种能够快速、安全地使车辆自动驶入泊车位的智能泊车辅助系统,它通过超声波以及图像传感器感知车辆周围环境信息来识别泊车车位,并根据车辆与停车位的相对位置信息,产生相应的泊车轨迹并控制车辆的速度和方向盘转向完成自动泊车。与驾驶员泊车操作复杂、泊车时间长、泊车安全事故率高相比,自动泊车系统提供了一种简单、方便的泊车功能,降低了泊车操作时的难度,提高了车辆的智能化水平。目前,自动泊车系统的开发也成为国内主流汽车主动安全研究的重要方向之一。
在自动泊车系统开发过程中,自动泊车系统建模与仿真是实现自动泊车系统开发的核心技术之一,是提高自动泊车系统综合性能、可靠性、安全性和降低开发成本的重要环节。目前,现有的文献大多集中在对自动泊车系统某一组成部分方面的建模研究,如自动泊车系统车辆运动学模型[1]、基于最小半径的轨迹生成模型[2]、基于不等半径的轨迹生成模型[3]、基于模糊控制的轨迹生成模型[4],对自动泊车系统建模研究还不够完善。
对自动泊车系统建模与仿真的研究,不仅能够快捷地模拟泊车环境(车辆尺寸、泊车位尺寸、车辆起始位置等),仿真验证不同环境下的车位匹配、转向控制、轨迹生成、轨迹控制等算法的有效性,从而提高算法在不同泊车环境下的适应性,并且能够很好地预测各种环境下的系统性能,验证在实车工作环境下自动泊车系统算法的有效性和可靠性。这样,不但可以实现灵活地调整设计方案,合理优化参数,而且可以降低开发成本,缩短开发周期,提高自动泊车系统开发的效率。由此可见,自动泊车系统建模研究对自动泊车系统显得尤其重要,是直接决定其稳定性、可靠性、安全性和开发效率的关键技术之一,所以,对本课题的研究势在必行。
1 自动泊车系统建模
1.1 车辆运动学模型
在研究自动泊车系统时,首先需要确定车辆运动姿态,研究车辆的运动轨迹。因此,需要建立车辆运动学模型[5]。在整个自动泊车过程中,车辆总是处于一种低速行驶状态,车辆在低速行驶过程中不会出现滑动和侧向移动,为此,在这种情况下建立车辆运动学模型如图1所示。
根据车辆运动学模型可以得到以下关系式。
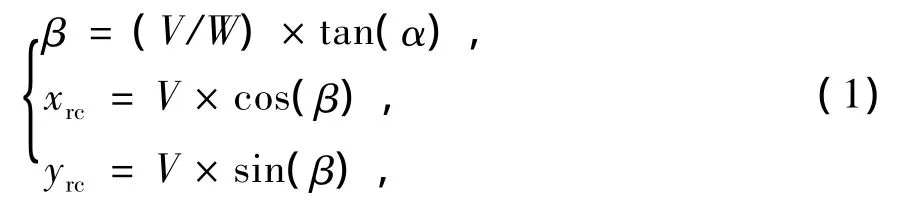
(1)式中:β为车辆车轴和水平方向的夹角;α为车辆前轮和车辆车轴的夹角;xrc为后轴中心点横坐标;yrc为后轴中心点纵坐标;V为车辆的运动速度;W为车辆的轴距。从上面的分析可以得知,汽车模型具有3个控制状态变量:xrc,yrc,α以及一个输出状态变量β,便可以构建车辆运动学Simulink模块,如图2所示。
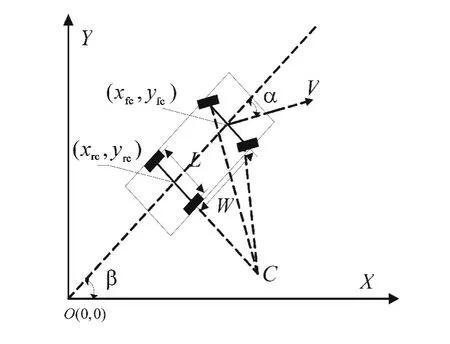
图1 车辆运动学模型Fig.1 Kinematic model of the vehicle
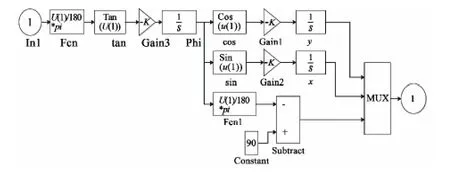
图2 车辆运动学Simulink模块Fig.2 Vehicle kinematics Simulink blocks
1.2 车位匹配模型
车位匹配是基于安装在车辆后方的广角摄像头采集的图像信息实现。但广角摄像头成像模型与小孔成像模型(线性模型)存在一定差异,从而使得广角摄像头采集的图像信息与实际的图像之间存在一定的畸变。为了能够得到实际的图像信息、消除图像畸变,采用文献[6]的标定方法对采集的图像进行畸变矫正,从而得到实际的图像信息。
车位匹配的目的主要有2个:①能够确定目标车位;②能够确定目标车位与车辆之间的位置关系。因此,在不使用GPS、惯性导航[7]等价格昂贵的定位系统下,采用了一种既方便又准确的图像测距方法。根据标定后的摄像头参数建立摄像头成像几何模型[8],如图3 所示。
由摄像头几何成像模型的几何关系可得到公式(2)。
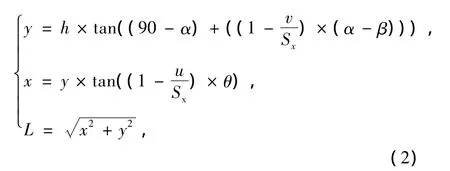
(2)式中:h是摄像头与地面之间的距离;α为摄像头垂直视角射线与地平面y轴之间的夹角;Sx和Sy分别是图像的行数和列数;y是点P(x,y)在世界坐标系xoy下的纵坐标,即目标点与摄像头在垂线方向下的距离;x是点P(x,y)在世界坐标系xoy下的横坐标,即目标点与摄像头在水平方向上的距离;L是所求目标点与摄像头的距离。但是该方法在进行图像测距时有一定局限性,该方法只能在摄像头成像平面为同一个平面时才能进行测距运算。当h=0.9 m以及 α=30°,该方法所能测量的距离为0.5~3 m,不满足泊车位匹配测距最小要求0.5~9 m。

图3 摄像头几何成像模型Fig.3 Geometrical imaging model of camera
在实验中,本文中的摄像头安装及采集范围示意图如图4所示。
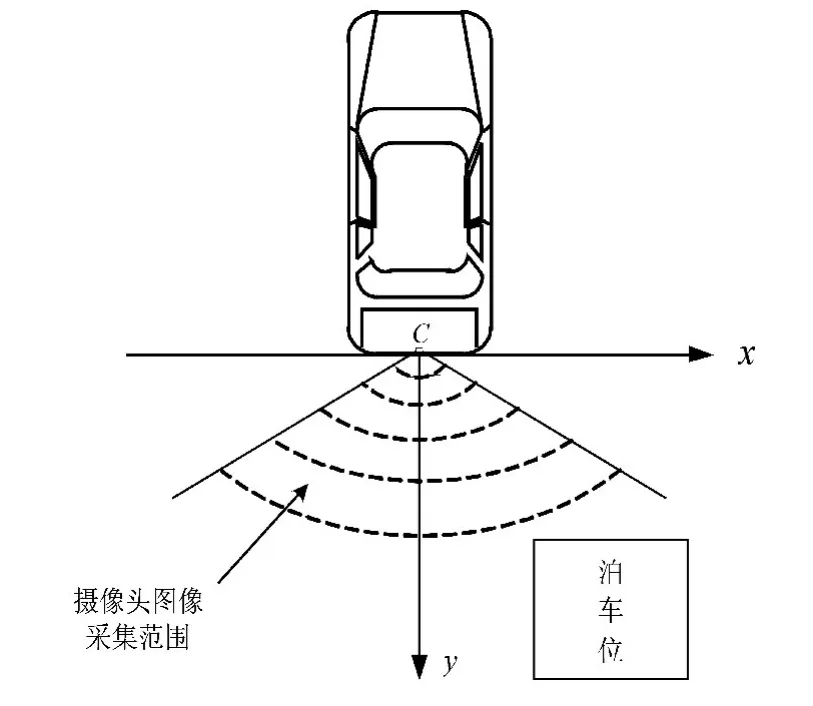
图4 摄像头安装及采集范围示意图Fig.4 Location of camera and the capture range of camera
图4中,摄像头(C点)安装于车尾,并以摄像头为坐标原点建立如图4所示坐标系。在实际测量图像坐标与世界坐标之间的映射点时,通过对测量数据的分析与处理,发现图像坐标中Y轴(即V)像素点所对应的世界坐标y轴中的实际纵向距离满足反比例函数关系,图像坐标中X轴(即U)像素点所对应的世界坐标x轴中的实际横向距离满足正比例函数关系,如公式(3)。

公式(3)表示世界坐标中点(x,y)转化为图像坐标中点(U,V);X表示世界坐标中y所在行所对应的最大横向距离。摄像头采集的图像大小为640×480,图像坐标轴中心点为(320,0)。该方法实现的图像测距为0.5~9.5 m,图像测距数据绝对误差为0~15 cm。
通过该方法便可以在图像系统中建立一个与实际车位大小相同的带有测距功能的虚拟车位,在图像系统中对虚拟车位进行前后左右以及左旋、右旋等操作便可以实现对实际车位的位置匹配与定位,从而可以获得车辆与车位之间的横向距离及纵向距离,为轨迹生成提供了车辆与车位之间的距离参数。平行泊车车位和垂直泊车车位匹配图如图5所示。

图5 车位匹配图Fig.5 Parking space matching
1.3 轨迹生成模型
利用最小半径法轨迹生成方法[9]可以将车辆驶入泊车位,但是这种方法具有一定的局限性,其对车辆泊车初始位置范围较为局限。为了能够提高自动泊车系统泊车初始位置的范围,本文在基于最小半径方案的基础上提出了一些改进,该方法能够提高泊车初始纵向距离范围。由前文所描述的车辆运动学模型可知,可以通过该车辆运动学模型求得车辆运动过程中,车辆后轴中心点在世界坐标系的位置坐标。本文选用车辆后轴中心点作为参考点,对泊车轨迹进行规划,如图6所示。在泊车准备过程中,车辆由状态3驶向状态1,当车辆到达状态1时,可通过图像信息匹配车位后可以获取包括车位长度Lp,S0与车位底端距离dy,车辆与障碍物之间的横向距离dx等信息,其中,S0点为泊车起始位置时车辆后轴中心点,Sd点为泊车结束时车辆后轴中心点(车辆在车位中与前后方障碍物保持相同距离)。
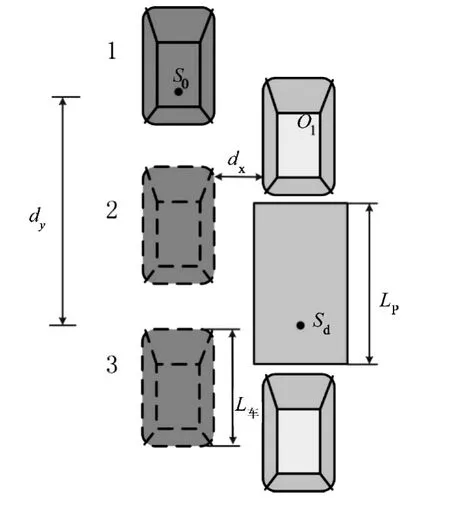
图6 平行泊车轨迹生成模型Fig.6 Parallel parking trajectory generation model
本文规划的轨迹示意图如图7所示,泊车轨迹由3部分组成:直行向后的直线段S0S1;圆弧S1C和圆弧CSd。泊车过程如下,当车辆完成车位匹配后,开始进行泊车,泊车起始位置为S0点,车辆自动倒车至S1点后开始右转向,倒至C点后开始左转向,进而倒至目标点Sd点,从而完成泊车。
图7中,坐标原点以摄像头为基准点;Rmin为车辆的最小转弯半径,dx为车辆与车位之间的横向距离;dy为车辆与车位之间的纵向距离。dx,dy距离参数可通过车位匹配获取,从而可以根据几何关系计算泊车轨迹规划中关键点S1,C,Sd的坐标。
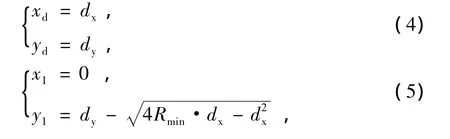
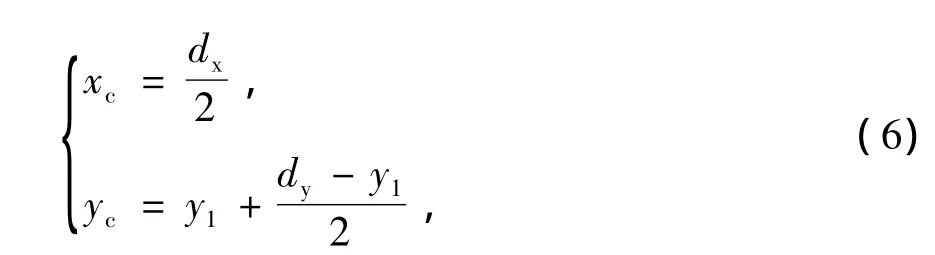
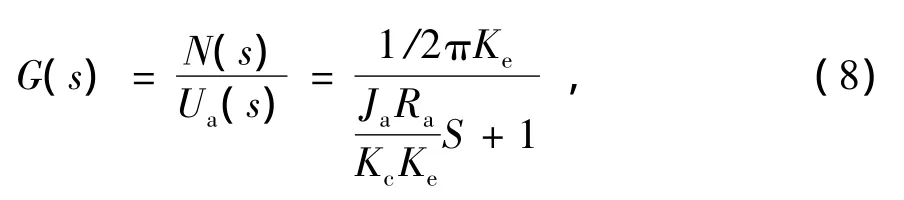
根据获取的泊车过程中关键点的坐标,进而可以计算出在泊车过程中每段轨迹行驶的距离,可得泊车轨迹方程为
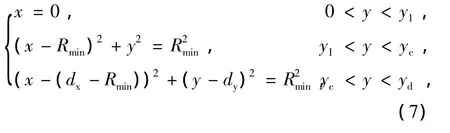
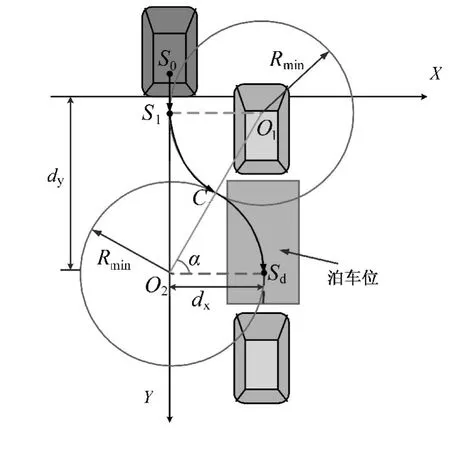
图7 泊车轨迹示意图Fig.7 Parking trajectory Schematic
1.4 轨迹控制模型
自动泊车系统中对轨迹的控制其实质是对电子助力转向系统(electric power steering)的控制。电子助力转向系统主要由以下几个模块构成:直流电机、角度传感器、电机控制板。对轨迹的控制模型如图8所示。
图8 轨迹控制模型Fig.8 Track control schematic
由图8可知,对轨迹的控制其核心是对直流电机的控制。电机模型在零初始条件下的传递函数为
通过将电机的实际参数代入传递函数中就可在Simulink中构建基于PID的轨迹控制模块,如图9所示。
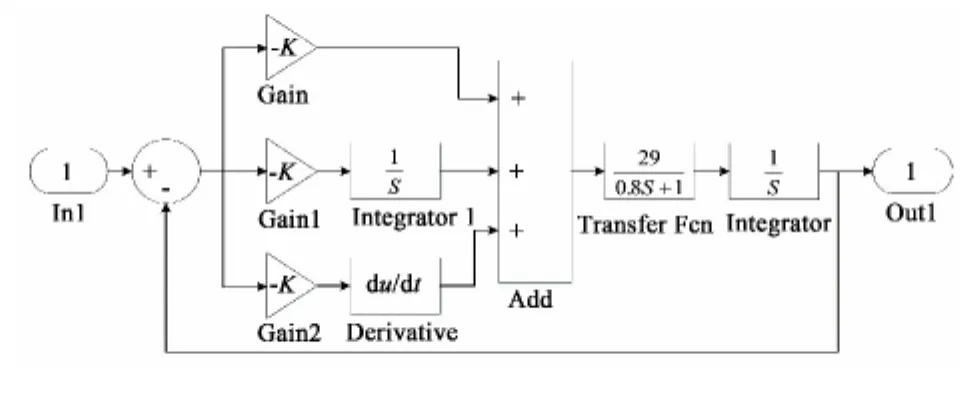
图9 轨迹控制Simulink模块Fig.9 Trajectory control Simulink blocks
1.5 泊车环境模型
在自动泊车过程中,车辆参数和泊车环境参数可对泊车过程产生影响。对于确定车辆而言,车辆参数如车长、车宽、前悬、最小转弯半径固定不变,对泊车过程产生的影响仅为泊车环境参数即停车位长度、停车位宽度、车辆与泊车位之间的距离以及泊车位前后的障碍物情况。因此,对泊车环境模型的建立尤为重要。
在环境建模中,WIJK[10]开发出超声波数据基于三角的融合方(triangulation-based fusion,TBF)来识别周围物体,主要通过计算圆的交点和应用多个连续位置处的超声波数据的角度约束来实现,成功实现对周围环境建模。本文采用TBF算法对多个超声波数据进行处理,将所得到的超声波数据,采用最小二乘法,递增式提取环境特征,得到环境模型。其在Matlab中的仿真图如图10所示。
2 仿真
在Simulink中搭建仿真模型,并在MATLAB中构建GUI(graphical user interface)图形仿真界面。根据试验车的具体参数分别对不同泊车环境条件进行自动泊车系统动态仿真,仿真结果如图11和图12所示。图11表示在泊车过程中通过车位匹配获取车辆与车位之间的位置关系,图12表示根据获取的位置关系生成理想泊车轨迹并根据轨迹参数进行PID(proportion integral differential)控制方向盘实现泊车。
在仿真系统中,车位匹配、轨迹生成、轨迹控制等自动泊车系统核心算法得到有效的运用。在不同环境下(不同的泊车初始位置)的自动泊车仿真结果如图13所示,其中,a,b,c,d分别表示车辆与泊车位(泊车轨迹生成中S0与Sd之间的距离)横向距离为245 cm,265 cm,295 cm,330 cm,纵向距离为800 cm,800 cm,800 cm,800 cm 时泊车系统仿真过程。其中,e,f,g,h分别表示车辆与泊车位(泊车轨迹生成中S0与Sd之间的距离)横向距离为265 cm,265 cm,265 cm,265 cm,纵向距离为 800 cm,750 cm,700 cm,640 cm时泊车系统仿真过程。其仿真结果表明,在满足基于改进型最小半径轨迹生成方法的泊车初始范围条件下,在不同泊车环境下车位匹配、轨迹生成、轨迹控制等自动泊车系统核心算法能够在该仿真系统中有效协同工作。其中,图13 中,a,b,c,e,f,g 仿真结果均为成功,其泊车初始范围满足基于改进型最小半径轨迹生成方法的泊车限制条件。图13中,d,h仿真结果均为失败,其泊车初始范围不满足基于改进型最小半径轨迹生成方法的泊车限制条件。
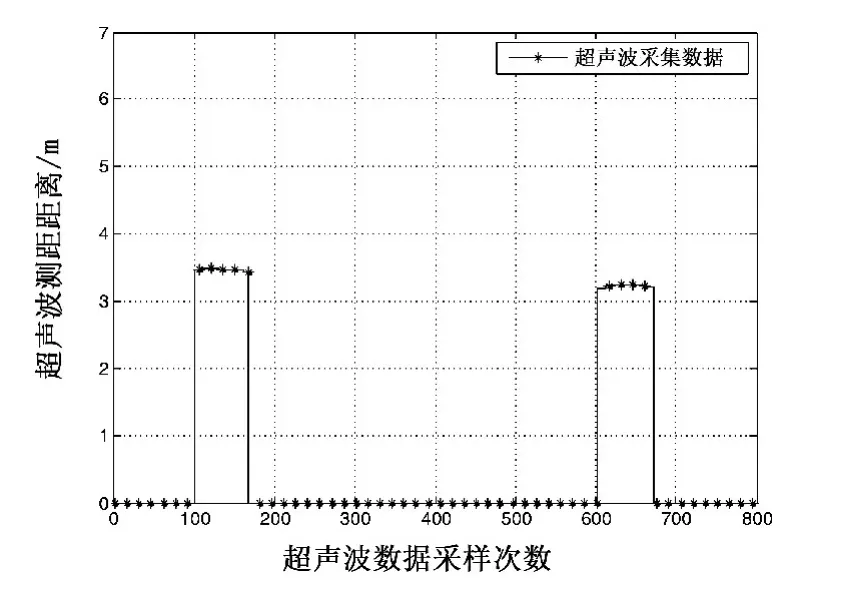
图10 基于Triangular-based fusion的泊车环境模型仿真Fig.10 Simulation map of parking’s environment model based on triangular-based fusion
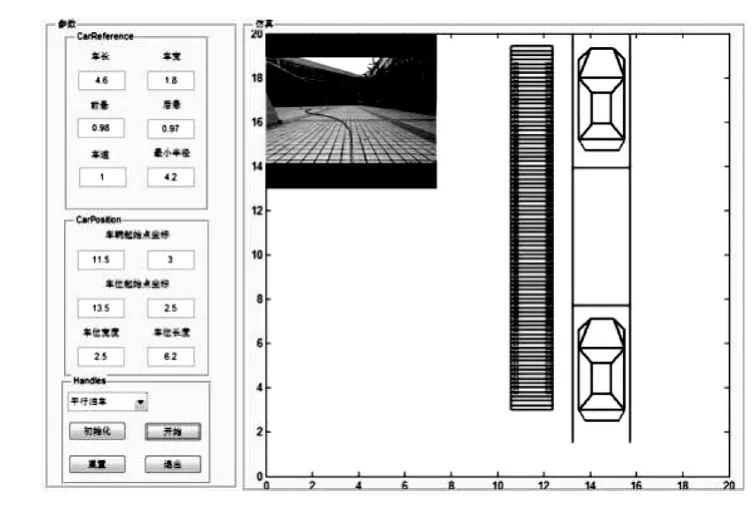
图11 自动泊车过程中车位匹配Fig.11 Automatic parking spaces matching
3 实验结果
首先,根据汽车库建筑设计规范搭建一个长600 cm,宽240 cm的平行泊车位,如图14所示。实验车辆以10 km/h的速度经过泊车位后,超声波车位检测系统便能够检测出待泊车位。通过图像信息的车位匹配系统便能够确定车辆与待泊车位之间的位置关系,如图15所示。自动平行泊车系统示意图如图16所示。

图12 自动泊车过程中轨迹生成和轨迹控制Fig.12 Automatic parking processes trajectory generation and trajectory control

图15 车位匹配与轨迹生成Fig.15 Parking spaces matching and trajectory generation
采用相同的泊车位大小,不同的泊车初始环境(不同的横向距离dx和纵向距离dy)并结合车位匹配、转向控制、轨迹生成、轨迹控制算法分别在仿真系统和实车系统进行泊车测试。
通过比较仿真系统和实车系统泊车过程中转向关键点S1,C,Sd的车辆方向盘转向角度以及车辆后轴中心点与目标泊入车位后车辆后轴中心点所在位置的横向距离与纵向距离,分析所建立的自动泊车系统模型是否有效。其仿真系统测试结果如表1所示,实车系统测试结果如表2所示。
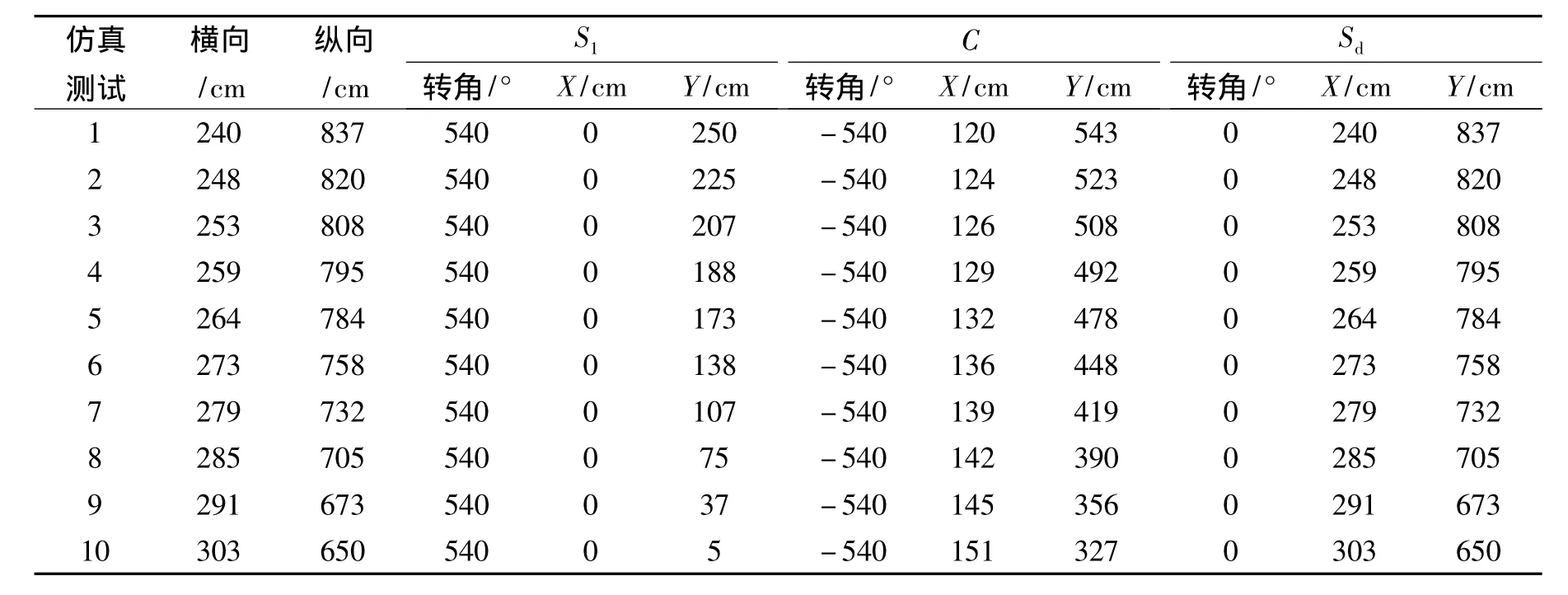
表1 不同环境下的仿真系统泊车关键点测试数据Tab.1 Parking key points test data in simulation system in different contexts
通过分析表1、表2中数据可知,在相同环境下,分别在仿真系统与实车系统进行10组泊车测试。其中,在关键点S1处,仿真数据与实车数据中车辆方向盘转向角度相对误差在0.9%以内,轨迹控制横向距离相对误差在2.8%以内,纵向距离相对误差在2.1%以内。在关键点C处,仿真数据与实车数据中车辆方向盘转向角度相对误差在1.1%以内,轨迹控制横向距离相对误差在2.9%以内,纵向距离相对误差在1.9%以内。在关键点Sd处,仿真数据与实车数据中车辆方向盘转向角度相对误差在0.8%以内,轨迹控制横向距离相对误差在3.3%以内,纵向距离相对误差在1.8%以内。由试验数据分析可得,本文构建的自动泊车系统模型有效。
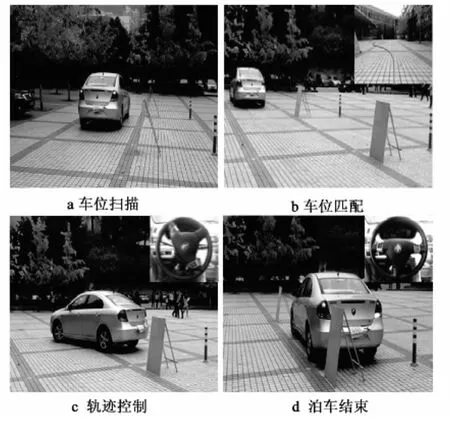
图16 自动平行泊车系统示意图Fig.16 Automatic parallel parking system Schematic diagram
4 误差分析
本文在相同环境下,分别在仿真系统与实车系统中进行泊车实验,其实验结果表明仿真系统和实车系统在方向盘角度控制数据以及行驶距离控制数据中都存在一定误差。通过对实验数据进行仔细分析,现总结误差原因如下:车辆运动学模型主要是基于实际测量车辆的参数为基础实现。本文在对车辆参数进行测量时,由于测量精度不高导致了测量数据存在±5 cm以内的测量误差。
车位匹配模型是基于图像测距算法功能实现。由于在对图像坐标与世界坐标之间映射点进行测量时存在测量误差,导致了本文中设计的图像测距算法在进行图像测距时存在15 cm测量误差。
轨迹生成模型是基于车辆最小转弯半径实现。本文在对车辆最小转弯半径进行测量时,主要通过用卷尺对车辆以最大转向角度进行圆周运动时右前轮留下的轨迹的半径进行测量,在测量的过程中会产生±5 cm以内的测量误差。
轨迹控制模型是基于理想路面情况(没有摩擦力)下实现。在实际的转向控制时,由于路面与轮胎之间的摩擦力,仿真系统与实车系统之间在方向盘转角上有5°以内的角度控制误差(方向盘转角范围)。
泊车环境模型的建立主要基于超声波测距数据实现。本文设计的超声波传感器测距系统对障碍物进行距离测量时,其测距系统会产生±1 cm以内的测距误差。
由于以上误差的存在,从而导致了实验结果的一些偏差,但其偏差在误差范围内,经过多次测试,其实验结果基本满足泊车要求。
5 结束语
本文建立了自动泊车系统模型。首先,分析了自动泊车系统模型的架构,构建了各个组成部分的数学模型。其次,根据数学模型搭建仿真模型并对系统进行动态仿真。然后,结合仿真数据在实车上进行测试验证。在相同的泊车环境下对仿真系统与实车系统泊车过程中关键点进行测量,对比数据结果表明,车辆方向盘转向角度相对误差在1.1%以内,轨迹控制横向距离相对误差在3.3%以内,纵向距离相对误差在2.1%以内,因此,本文构建的自动泊车系统模型有效。由于自动泊车系统开发的复杂性,本文只在平行泊车条件下进行仿真和验证,对于垂直泊车条件下的自动泊车系统模型还需要进一步研究。
[1]KHOSHNEJAD M,DEMIRLI K.Autonomous Parallel Parking of a Car-Like Mobile Robot by a Neuro-Fuzzy Behavior-Based Controller [C]//Annual Meeting of the North American.Ann Arbor,Michigan:Fuzzy Information Processing Society,2005:814 -819.
[2]LIANG Huawei,ZHU Hui,WANG Shaoping.Research on Self-parking Path Planning Algorithms[C]//2011 IEEE International Conference.Beijing,China:Vehicular Electronics and Safety,2011:258-262.
[3]杨妮娜,梁华为,王少平.平行泊车的路径规划方法及其仿真研究[J].电子测量技术,2011,34(1):42-45.YANG Nina,LIANG Huawei,WANG Shaoping..Trajectory Planning Method and Simulation Research of Parallel Parking[J].Electronic Measurement Technology,2011,34(1):42-45.
[4]王萍.基于模糊控制理论的平行泊车系统研究[J].佳木斯工学院学报,2012,30(1):28-32.WANG Ping.Research on Parallel Parking System Based on Fuzzy Control Theory[J].Journal of Jiamusi University,2012,30(1):28-32.
[5]REN Xiaoping.Kinematics Model of Unmanned Driving Vehicle[C]//Proceedings of the 8th World Congress.Jinan,China:Intelligent Control and Automation,2010:5910-5914.
[6]ZHANG Zhengyou.A Flexible New Technique for Camera Calibration[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,22(11):1330-1334.
[7]CHEN C H,HSU C W.A Novel Design for Full Automatic Parking System [C]//The 12the International Conference.Taipei,China:ITS Telecommunications,2012:175-179.
[8]赵玲,刘清.基于机器人单目视觉导航的测距方法研究[J].自动化博览,2006,23(6):80-82.ZHAO Ling,LIU Qing.Study on distance Measure based on Monocular Vision Navigation [J].Automation Panorama,2006,23(6):80-82.
[9]CHOI S W,BOUSSARD C.Easy Path Planning and Robust Control for Automatic Parallel Parking [C]//Preprints of the 18th IFAC.Milano,Italy:World Congress,2011:656-661.
[10]WIJK O,CHRISTENSEN H I.Triangulation-Based Fusion of Sonar Data with Application in Robot Pose Tracking[J].IEEE Transactions on Robotics and Automation,2000,16(6):740-752.
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年7期)2022-04-20
汽车工程师(2021年12期)2022-01-18
汽车画刊(2020年5期)2020-10-20
祝您健康·文摘版(2020年3期)2020-04-09
军民两用技术与产品(2020年3期)2020-04-07
现代家长(2018年11期)2018-01-05
汽车维修与保养(2015年8期)2015-04-17
科技资讯(2012年28期)2012-07-09
