载人月球车金属弹性筛网轮设计与分析
2014-12-15 02:49范雪兵邓宗全高海波
宇航学报 2014年2期
范雪兵,邓宗全,高海波,丁 亮
(1.哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨150001;2.东北电力大学机械工程学院,吉林132012)
0 引言
随着无人探月工程的深入及载人探月工程的逐步启动,载人月球车作为宇航员登陆月球有效完成探测任务的主要媒介和工具,其相关理论及研制已十分必要[1]。车轮是载人探测车轮式移动系统最为关键的部件之一。无人车中应用较多的刚性车轮,具有较高强度及承载能力,但吸振性能不能满足载人要求。在地面车辆中理论及应用均较为成熟的充气膨胀轮,具有较好的吸振性能,但对苛刻月球环境的适应性不强。因此,质轻、承载能力强、吸振性能较好的金属弹性车轮必将成为载人探月研究的重点。
国内外各个研究机构都依据不同的探测目标和适用环境,对轮式探测车弹性车轮的理论及应用进行了相关的研究。俄罗斯车辆研究所(图1(a)~(d))[2]、美国航空航天局(NASA)和喷气推进实验室(JPL)(图1(e)~ (h))[3]、日本及欧空局(ESA)(图1(i))所示)[4]等研究机构相继研制出多种可行的探测车弹性车轮。美国登月的LRV载人月球车车轮(图1(e))[5]、登陆火星的 Sojourner和 MER火星车车轮(图1(f))和俄罗斯研制的Lunokhod探测车弹性车轮(图1(a))[6]等都是星球探测中成功应用的实例。
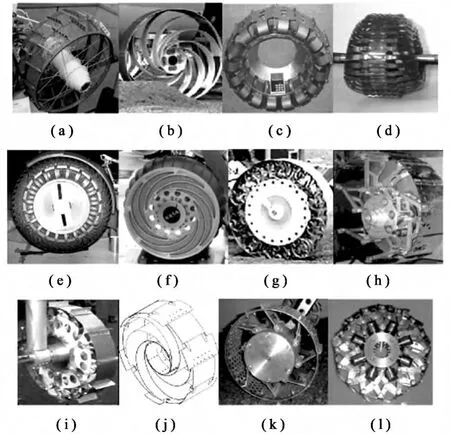
图1 已研制的弹性及可展车轮实例Fig.1 Application cases of the flexible wheel
国内对探测车弹性车轮方面的研究相对有限,大多针对无人刚性车轮进行[7]。北京航空航天大学(图 1(j))[8],吉林大学(图 1(k))[9],哈尔滨工业大学(图1(l))[10-11]对弹性及可展车轮进行了相关研究。
载人月球车车轮除满足适应月面非结构化环境、功耗低等无人月球车的特点外,还要满足大载荷、具有较高时速及宇航员乘坐舒适性等多方面因素限制,与无人车车轮在设计理论及方法上存在较大差异。因此,有必要对载人月球车金属弹性筛网轮的设计及制造进行研究。
1 载人月球车金属弹性筛网轮构型分析与设计
构型分析对车轮的结构及性能具有决定性的作用,是首要的基础工作。全轮驱动载人月球车车轮子系统可以分为驱动组件、车轮本体两个二级子系统构成,而这两个子系统又可看作由多个下级子系统组成,如图2所示,如何在有限的空间及质量约束下设计出合理的驱动电机及减速机构、综合考虑驱动、制动以及悬架等子系统的性能及耦合关系,使整个车轮子系统既轻又能满足各项性能指标要求,成为关键所在。
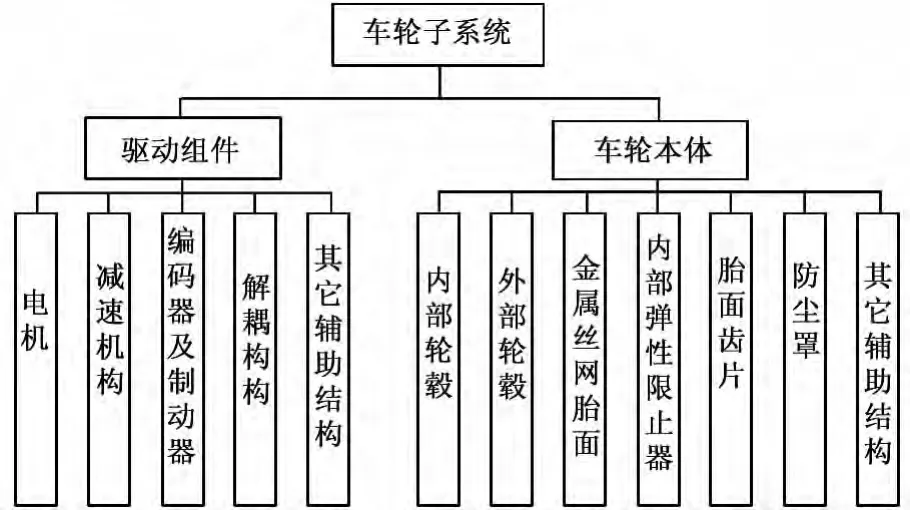
图2 车轮子系统构成示意框图Fig.2 Makeup of wheel subsystem
车轮子系统结构复杂,受到整车包络尺寸、质量及有效载荷要求的影响,车轮在尺寸、刚度、弹性及质量等约束条件下,各个组成元素间及其与系统整体之间联系紧密,可结合系统工程的原理对其进行设计和分析。
1. 1 载人月球车金属弹性筛网轮构型特点与要求
载人月球车车轮的设计应充分考虑月面探测任务及环境的影响,车轮应能够有效降低月面重力下接地压力,防月尘扬起,同时还要保证具有一定的抗侧滑及有效降低转向阻力的能力等。载人月球车金属弹性筛网轮需满足的性能要求概括如下:
包络尺寸约束:车轮宽度和半径应当小于上限值,上限值可由载人月球车整车折叠及展开状态的包络尺寸获得。
质量约束:可由整车质量约束及车轮车身合理质量比获得。
承载能力要求:载人月球车有效载荷包括宇航员、科学仪器、采集样品及相关辅助设备等,可获得车轮承载能力。
几何通过性能要求:顶起失效和触头失效的障碍条件及载人月球车越过一定高度和宽度的障碍及壕沟等对车轮直径提出的要求,可由月表着陆点地形分析等数据获得。
功率及驱动转矩约束:电机驱动组件最大输出力矩应大于月壤形成的阻力矩。
月壤防积存要求:车轮结构可让月壤在轮胎内表面自由流动,使轮胎和轮毂空间内不积存土壤(防止卡住);同时,有利于车轮行进及转向。
平顺性要求:车轮应有一定弹性,即可以消除冲击能量,降低振动与冲击对载荷平台及座椅人体的影响;
环境适应性:车轮材料应是耐腐蚀、抗辐射、抗月表黏土碎块黏着的,结构上也要考虑适宜真空、高低温变化的特殊要求。
1. 2 双轴四轮可展载人月球车金属弹性筛网轮构型设计
金属弹性筛网轮是针对双轴四轮可展载人月球车而设计,月球车可搭载两名宇航员,承载一定的有效载荷。四轮为轮毂驱动,车轮子系统采用驱动传动一体化设计,转向系统采用双套阿克曼机械转向方式,底盘由前中后三部分组成,实现可折展,且车轮及悬架亦可折叠,以节省整车所占包络空间。车轮子系统在可展载人月球车中的布置及结构如图3和图4所示。各部分构型组成及功能详见表1。
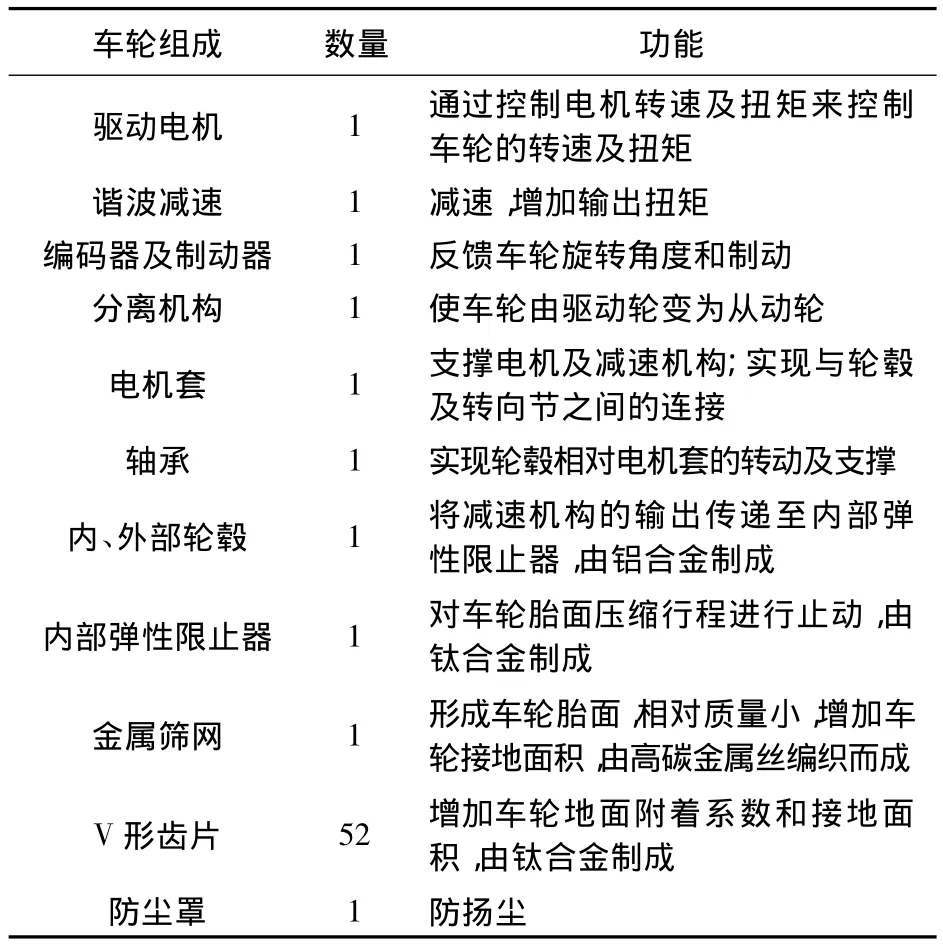
表1 车轮组成及材质Table 1 Makeup and material of the wheel
车轮本体结构与传统地面载人车辆充气轮胎及无人星球探测车车轮结构相比,更为特殊。其一,车轮胎面由镀锌钢丝编织而成,满足质量约束的前提下,可具有较好的行驶平顺性;筛网结构使月壤不至积存于轮胎与轮毂的有限空间内而影响移动性能;其二,轮毂采用组合式,材质为铝合金。结合轻量化设计理念,组合式结构更有利于车轮子系统装配;其三,内部弹性限止器对车轮受极限冲击起到保护支撑作用,类似于传统充气胎的帘布层及带束层等的作用;其四,弹性车轮的外表面上安装有钛合金的齿片,齿片成“人”字形均匀分布在车轮圆周表面,齿片采用断开式设计,增加地面附着系数和接地面积的同时,车轮耐疲劳寿命有所改善。
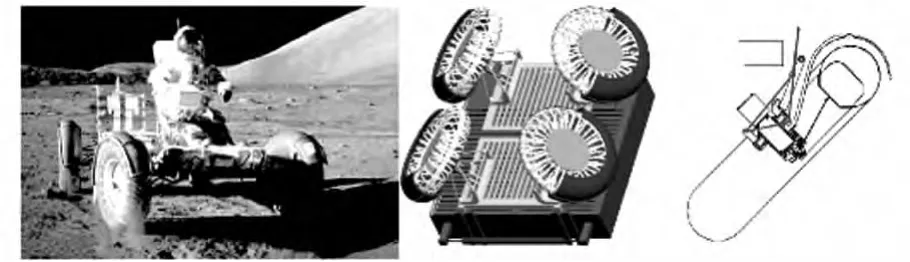
图3 金属弹性筛网轮在双轴四轮可折展载人月球车中的布置Fig.3 Flexible wire mesh tire’s arrangement for deployable manned lunar vehicle with dual axes and four wheels

图4 载人月球车金属弹性筛网轮装配件模型Fig.4 Assembly model of flexible mesh tire for manned lunar vehicle
2 基于功率约束的载人月球车金属弹性筛网轮驱动组件分析
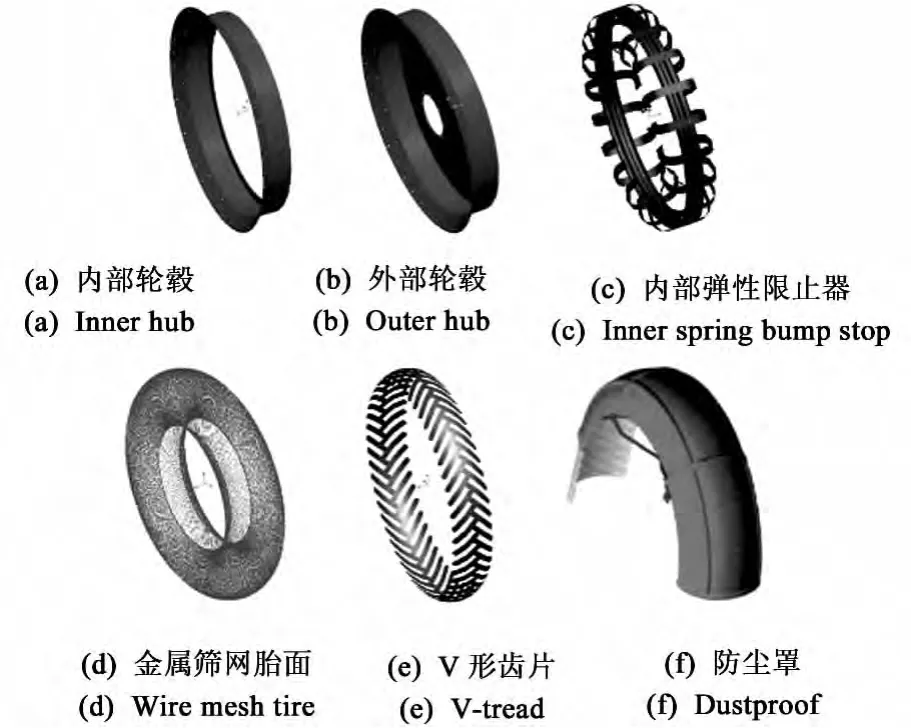
图5 载人月球车金属弹性筛网轮组件模型Fig.5 Makeup of flexible mesh tire for manned lunar vehicle
车轮驱动组件的选用是基于轮地相互作用研究的基础上进行的。其研究方法主要有五类[12]:一是纯经验方法,典型代表是美国陆军工程部队水道试验站的圆锥指数法(WES法),只能适用于类似车型,不能用来精确预测新车型的通过性能。二是模型试验和因次分析方法,用模型试验法来解决车辆与土壤的关系问题,只适用于某些特定条件,所得结果有很大的近似性。三是半经验方法,对车轮与地面相互作用关系进行力学分析,以适当的试验为基础,建立车轮与地面相互作用关系的近似简化公式。四是基本理论方法研究,用土力学理论、弹塑性理论和土的本构关系理论来研究土壤与车轮的相互作用关系。五是数值模拟法[13],利用有限差分法、有限元法、边界元法等数值模拟法来解决一些用理论方法和试验方法难以解决的问题,但目前还不能达到作为标准研究方法的水平。
这里使用相对较为成熟的半经验法来进行计算,同时考虑整车质量及驱动电机的功率约束,对初始计算结果进行修正,进而对驱动组件进行选用[14],流程框图如图6所示。理论计算初始条件设定包括:载人月球车满载质量,爬坡能力,车轮直径,车轮宽度,载人月球车设计速度等。计算时假定各轮与地面接触良好,平均分担原理样机总负载,计算结果按单轮功率表示。
判定车轮刚弹性,是由车轮刚度和土壤强度的相对关系来确定的,若土壤强度相对车轮刚度较小,则车轮变形相对较小,可视为刚性轮;反之为弹性轮。文献[15]提出界定刚性轮和弹性轮的量化指标为滚动半径变形量的10%。这里所设计的载人月球车金属弹性筛网轮在设计条件下的滚动半径变形量可达10.89%(变形量与滚动半径的比值),属弹性轮。但现有的弹性轮的半经验公式多针对充气胎,故需进行车轮刚弹性的等效转化,采用一个半径大一些的虚拟刚性轮来代替[16](图7),进而运用刚性轮的有关经验及半经验公式对载人月球车金属弹性车轮的性能加以分析和初步预测。
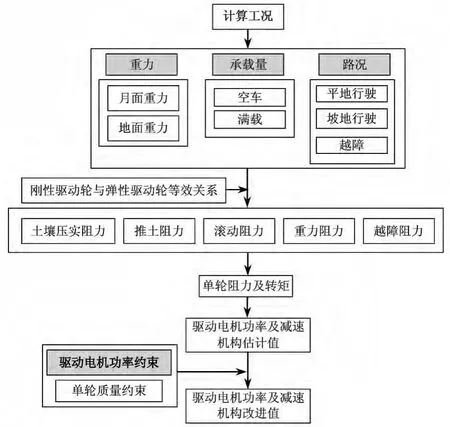
图6 载人月球车基于功率约束驱动组件选用流程框图Fig.6 Driving motors selected flowchart for manned lunar vehicle based on power constraint
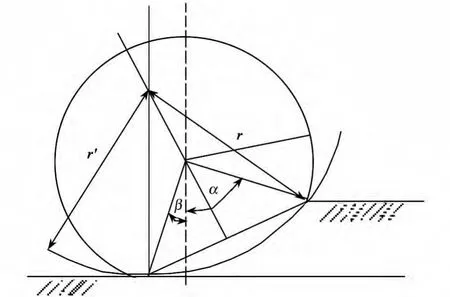
图7 弹性车轮与接地面积相同的刚性车轮的关系[13]Fig.7 The relationship between flexible wheel and rigid wheel with same contact area
虚拟刚性轮半径r'和原弹性轮半径r存在式(1)所示关系[15]:
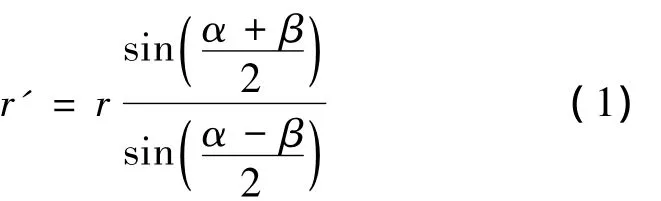
式中,α和β分别为车轮的进入角和离去角。
刚性轮适用半经验公式(2)[15]:

参数说明:d和b分别为车轮直径和轮宽,kφ为摩擦变形模数,kc为内聚变形模数,W为车轮公称载荷,n为沉陷指数,z为刚性轮沉陷量。
Bekker指出,对于中等下陷程度,应用式(1)和式(2)预测沉陷量可获得满意的结果,且车轮直径越大,下陷越小,预测就越准确[17]。但对于直径小于50cm的车轮,精确度较差。这里所设计的载人月球车车轮直径拟大于50cm,故可应用式(1)和式(2)进行有效计算。
2. 1 单轮运动阻力计算
载人月球车单轮运动阻力计算时,需分别考虑月地两种重力环境,并细分为直线行驶、爬坡和转向三种工况。载人月球车行驶时,有因移动系统内部的摩擦、振动、滞后等形成内部阻力,以及车轮在运动中与土壤相互作用,由土壤变形形成的外部阻力。这里仅讨论车轮所受到的外部阻力,主要包括:土壤压实阻力Rc,表现为车轮在运动过程中对土壤形成的沟辙;推土阻力Rb,主要表现为车轮前方形成拥土。此外还包括滚动阻力Rr,重力阻力Rg及越障阻力Ro等。
以土壤压实阻力[16]为例,刚性轮压实土壤所产生的阻力直接与车轮沉陷有关,压实阻力所消耗的功等于压出轮辙所作的功,经验公式如式(3)。

式中,θ为坡度,月壤沉陷指数n=1[17],上式可简化为

由式(3)和式(4)进行分析可知,为减少土壤压实阻力,增加车轮直径d比增加轮宽b更有效。
车轮其它外部阻力,推土阻力Rb、滚动阻力Rr、重力阻力Rg及越障阻力Ro等的具体计算可参考文献[14-17]的相关部分进行,这里不再详述。在一般情况下,影响月球车移动系统阻力的主要因素是对土壤的压实,对于轮式载人月球车而言,推土阻力仅在非常松软的土壤条件下才显得非常重要。
2. 2 单轮挂钩牵引力计算
挂钩牵引力是一个重要的性能参数,涉及了所有影响通过性的构形及环境参数,暂不考虑车轮的弹滞损耗等阻力,可按式(5)进行估算。

Fd为挂钩牵引力,F为牵引力,Fg为由履刺产生的牵引力,Rall为运动阻力和,不同行驶路况取值方法不同。对于平坦地形运动的车轮,Rall=Rc+Rb+Rr;对于爬坡的车轮,Rall=Rc+Rb+Rr+Rg;对于越障的车轮Rall=Rc+Rb+Rr+Ro。
2. 3 单轮驱动扭矩及功率计算
2.3.1 驱动扭矩
载人月球车的驱动系统所能够产生的驱动扭矩大于地面产生的运动阻力矩,载人月球车方可正常运行,驱动扭矩数值上可按式(6)[15]来进行估算。

式中,δ为车轮在径向上的变形量。基于此所进行的车轮驱动扭矩及功率计算与车轮直径d、车轮宽度b、车轮数量n、整车质量m、最大移动速度vmax、运动加速度a、传动效率η和爬坡坡度θ等参数有着密切的关系。
2.3.2 驱动功率
驱动功率是输出给驱动轮以维持牵引力的功率,可用式(7)对所需最大的驱动功率进行估计[15],这里考虑了各种线性因素和非线性因素的阻抗,如土壤压实阻力和滚动阻力等。

由此可得到单轮驱动扭矩和功率的初步计算结果,考虑单轮驱动功率约束和单轮质量约束,对其进行修正,即可确定载人月球车原理样机车轮所需最大转矩,在此基础上进行电机和减速机械等的初步选定,使驱动轮、转向机构的转矩均能够满足要求。最终,车轮的驱动电机选用400W无刷直流电机,减速机构采用减速比为160∶1的谐波减速器。车轮子系统驱动组件结构图及三维模型如图8所示。
3 载人月球车金属弹性筛网轮结构设计与分析
载人月球车金属弹性筛网轮轮体主要受力结构为组合式轮毂、内部弹性限止器及金属丝网胎面。这些结构功能不同,特点各异。

图8 驱动子系统CAD结构图及三维仿真模型Fig.8 CAD drawing and 3D model of Driving subsystem
3. 1 车轮组合式轮毂受力分析与有限元仿真
3.1.1 轮毂受力分析
载人月球车组合式轮毂受力主要是通过固定在轮辋上的金属筛网及内部弹性限止器的局部变形来实现的。组合式轮毂的几何形状复杂,在行驶过程中,承受多种交变载荷,难以确切描述。如载人月球车在倾斜月面上行驶时,车轮与月面之间产生轴向摩擦力;转弯时,产生一定的离心力,发生侧滑时产生轴向力,并对轮毂产生一个弯矩;载人月球车在起动、制动、加速、减速过程中,轮毂需要承受扭转力矩等。因此要依据不同的分析目标对模型进行有效简化。
3.1.2 基于静力分析的轮毂有限元建模及分析
首先考虑在静力作用下的情况,静载荷以地面重力下单轮承载735N为例进行分析。车轮内外部轮毂均选用2Al2-CZ硬质铝合金,其弹性模量为71 ×103MPa,泊松比为0.28,密度为 2 779kg/m3,屈服极限为390MPa。
(1)基于静力分析的轮毂有限元模型建立
据铝合金轮毂结构特点和受力状态,在建立几何模型和力学模型时有以下几方面的考虑。
(a)不考虑内外部轮毂的成形工艺,将二者以及连接铆钉的部位视为一体,忽略可能的其它影响;
(b)轮体无缺陷;
(c)几何模型中,轮毂外侧与金属弹性筛网轮连接部位作了一定的简化;
(d)铝合金轮毂为一圆形盘状对称结构,承受的载荷和约束也与轴垂直对称;
(e)在划分有限元网格时,主要考虑计算结果能反映铝合金轮毂受力的真实情况,几何建模时将个别小弧连接进行简化,使网格划分更趋合理,计算中全部采用四面体实体单元。
将螺栓组进行简化,直接将轮毂与电机套进行布尔运算成为一体,且材质均为铝合金。载荷以集中力的形式加载至电机套与转向节相接的平面上,轮毂约束是基于地面力学分析的结果,考虑到渐近角及离去角等的影响,在内外轮毂与内部弹性限止器的四个底部连接孔处,对其六个自由度进行约束。
(2)基于静力分析的轮毂有限元模型仿真结果
基于静力分析的轮毂有限元模型仿真分析结果如图9所示,最大应力为34.8MPa,远小于屈服极限,所以其变形为弹性范围内的变形,其最大变形为0.619mm。
3.1.3 基于动弯曲疲劳实验方法的轮毂有限元建模及分析
大量传统地面车辆的实践表明,对于轮毂,须经过动态弯曲疲劳、动态径向疲劳和车轮冲击三大试验[18],弯曲疲劳试验破坏几率远大于径向疲劳破坏,故据此分析该轮毂结构的高应力分布区,确定轮毂结构的改进方案。
(1)基于动弯曲疲劳实验方法的轮毂有限元模型建立
轮毂轮缘通过夹具固定在试验旋转台上,而轮毂毂部的八个紧固螺栓使轮毂安装盘与加载轴紧密相连,如图10所示。轮毂轮缘和轮毂螺栓孔内表面的三个平移自由度和两个旋转自由度都受到约束,只允许绕轮毂中心轴的转动。
由于在动态弯曲疲劳试验中,不同时刻车轮所受弯矩方向不同,但弯矩产生的应力效果是周期性的,且轮毂整体结构呈轴对称,对于轮毂上任一点,可取弯矩在一个方向所产生的最大应力值的疲劳状况,以近似代替轮毂整体的疲劳状况。
图10 动态弯曲疲劳实验装置示意图Fig.10 Dynamic-bend fatigue experiment equipment diagram
轮毂受力主要施加在轮辋上,该力可等效为在与轮毂连接的半轴端上加弯矩,但在NASTRAN里面很难实现。须使用PATRAN中的域(Field)函数作为载荷输入。为此,先以轮辋外侧圆周中心为坐标原点建立一个新直角坐标系(Rectangular Coordinate Frame)Coord 1。由于此分布力作用于轮辋半周,因此需要将轮辋圆周断开成半圆,然后将此载荷加在半圆弧上。
弯矩[19]由式(8)确定:

式中:M为弯矩;R为静负荷半径(最大轮胎静负荷半径,m);μ为车轮与月面间的侧向摩擦系数;c为车轮的偏距,内偏距为正,外偏距为负;F为单轮最大额定载荷,并考虑安全系数;S为强化系数。
加载弯矩时,使用用户输入最少的隐性MPCs-RBE3(Rigid Beam Element)。以内部轮毂外侧圆周中心为坐标原点建立一个柱坐标系(Cylindrical Coordinate Frame)Coord 2,在此坐标系的圆心处新建一个节点,然后创建RBE3单元,以此节点作为非独立项,分别建立若干个RBE3单元。再将弯矩沿柱坐标系Coord 2的T轴方向加在其圆心处的节点上。载荷及弯矩加载后的模型如图11所示。
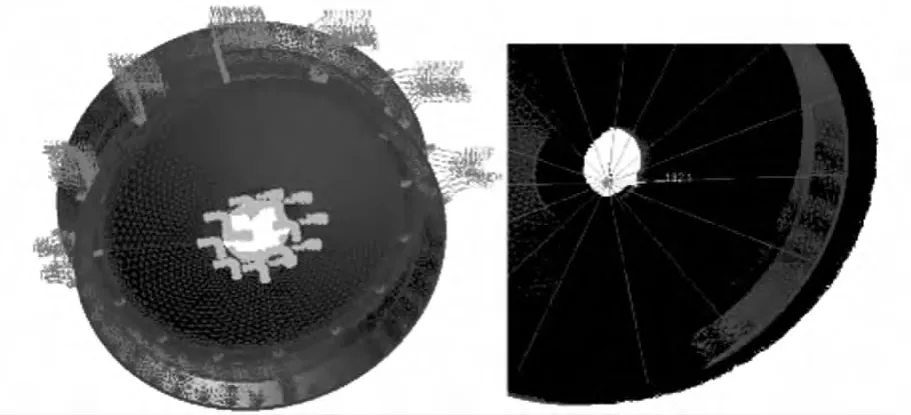
图11 施加约束及载荷后的轮毂有限元模型Fig.11 Finite element model of hub loaded with constraints
(2)基于动弯曲疲劳实验方法的仿真结果及分析
载人月球车轮毂受力要考虑到月面重力以及地面重力条件的不同,依此建立不同工况。
图12为单轮载荷165kg,月球重力条件下轮毂的应力及变形云图,可以看出,最大应力发生在电机驱动组件与轮毂连接螺栓孔处,最大值为575MPa,最大变形为10.6mm,最大应力及变形所在位置如图13所示。由于最大应力大于该材料的屈服极限,需对轮毂结构进行改进。
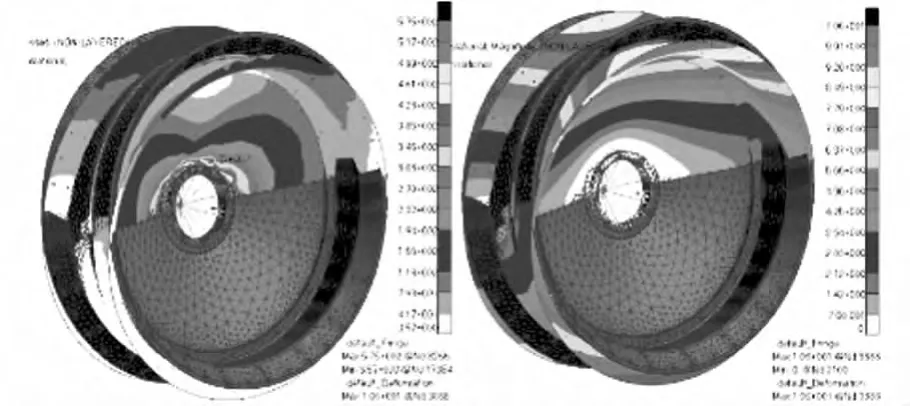
图12 动弯曲分析轮毂应力和变形云图Fig.12 Equivalent stress and deformation distributionof hub based on dynamic-bend fatigue experiment
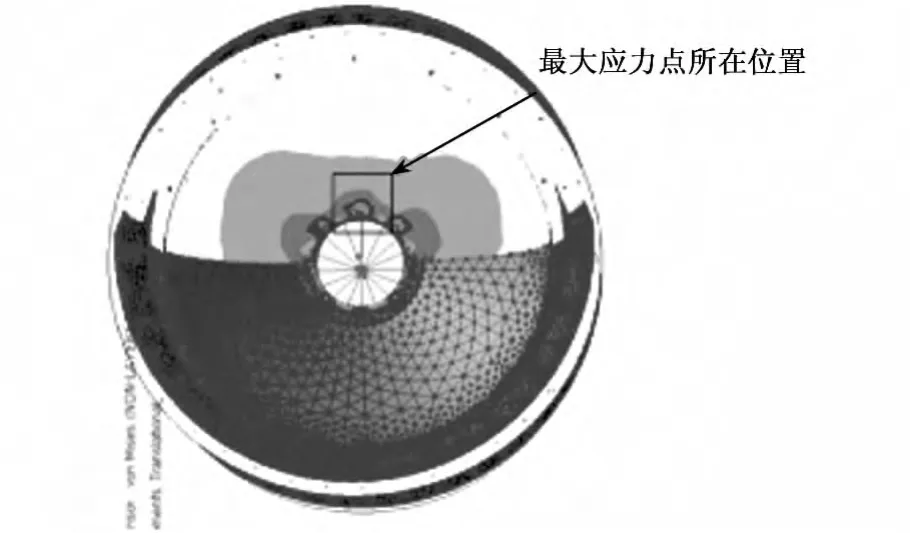
图13 轮毂最大应力及变形所在位置Fig.13 Location of maximal stress and deformation for hub
通过以上分析并考虑到加工工艺等因素,对多套改进方案进行分析比较,最终确定轮毂结构改进方案为将螺栓孔外移,轮辐按直线成形,降低轮毂壁厚,增加加强筋(考虑质量约束时优于凸台结构),且螺栓孔内外两侧增加垫圈等。表2仅列出在某一工况下轮毂有限元模型仿真分析的结果。
改进后的轮毂模型如图14所示,仿真分析结果最大应力为338MPa,小于屈服极限,最大变形为5.25mm。从以上分析可见,改进后的轮毂结构满足强度和刚度要求。
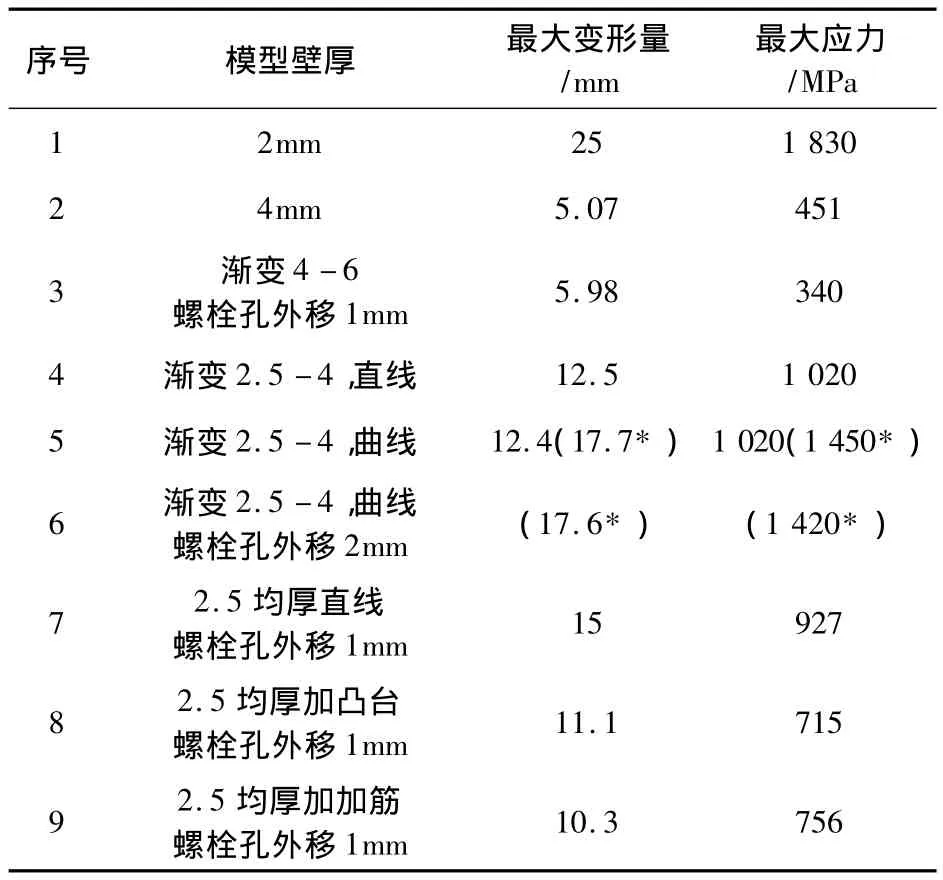
表2 同一工况轮毂多构型有限元分析结果汇总Table 2 Results of infinite analysis for same case

图14 轮毂改进后模型Fig.14 Improved hub model
3. 2 内部弹性限止器有限元分析
载人月球车金属弹性筛网轮中的内部弹性限止器,属于车轮的骨架结构,车轮受到极限冲击状态时对车轮起到刚性支撑和保护的作用。

图15 倒U型弹簧片有限元模型及仿真分析结果Fig.15 Finite element model and analysis results of inverse U-spring flack
图16 内部弹性限止器有限元模型及仿真分析结果Fig.16 Finite element model and analysis results of inner spring bump stop
可取其中一个倒U型弹簧片进行分析。图15为内部弹性限止器的一倒U型弹簧片有限元模型及分析结果,图16为内部弹性限止器简化模型及分析结果,从分析结果可知,在设计工况下,此结构能够满足强度及刚度要求。
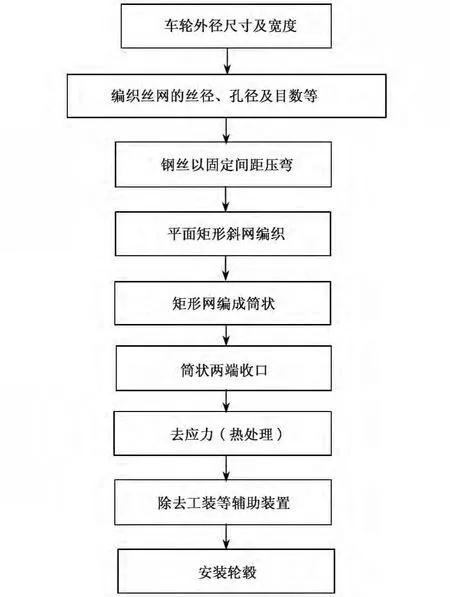
图17 载人月球车金属丝网胎面成形工艺Fig.17 Technical flow-chart of tire out frame
3. 3 筛网成形工艺
与传统地面车辆及轮式移动机器人相比较,载人月球车车轮胎面最为特殊,为镀锌钢丝编织而成,成形工艺复杂。车轮组件的装配存在诸多技术难点。经过实践验证,可采用图17所示工艺过程来进行加工制造。如图18所示,通过对金属筛网胎面收口、轮毂与内部弹性限止器及筛网接口及热处理工艺的反复尝试,按照前述成型工艺能够实现车轮子系统各组件的装配,并经轮地测试装置(图19)进行车轮基本性能参数的测试,能够满足设计要求。
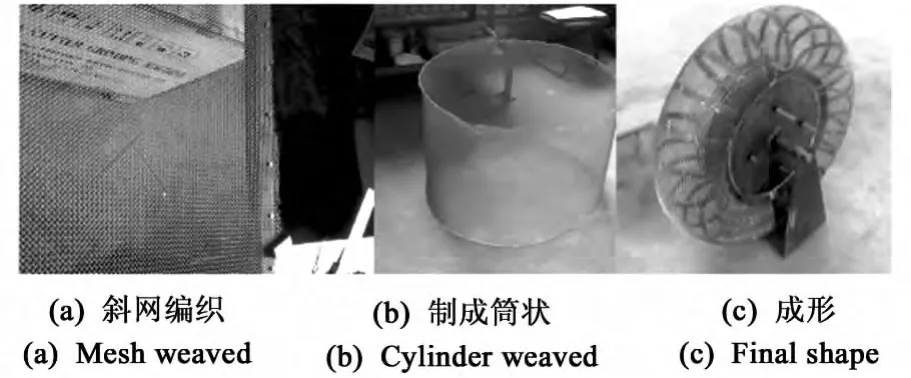
图18 载人月球车筛网加工实物图片Fig.18 Photos for tire out frame for manned lunar vehicle
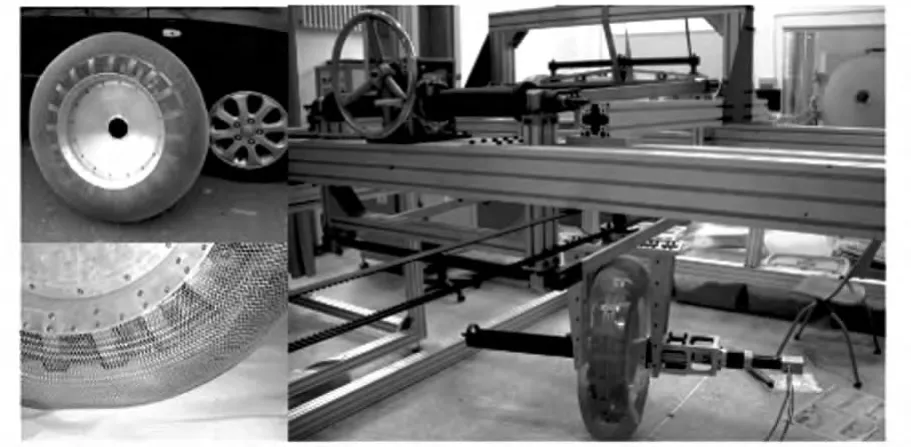
图19 载人月球车弹性筛网轮轮地相互作用测试示意图Fig.19 Photos for test-bed for manned lunar vehicle
4 结论
(1)综合考虑质量及功率等约束,基于轮地力学理论,采用半经验方法,可实现对单轮驱动扭矩及功率的分析和估算。
(2)对组合式轮毂进行了有限元仿真分析,由分析可知:轮毂壁厚和直接作用于轮缘上的分布力是对轮毂应力影响最为主要的因素;弯矩对轮毂作用的影响敏感度明显低于作用于轮缘上的分布力对轮毂应力的影响,但要高于其它影响因素。通过将螺栓孔位置向远离中心方向外移或将轮辐直线成形改为曲线成形,对轮毂应力有减小的趋势,但改善效果不显著。
(3)解决了载人月球车金属弹性筛网的成形工艺,经实践检验可行,能较好地保证车轮胎面编织及成形的一致性。
本文设计的金属弹性筛网轮,车轮由金属丝网胎面、内部弹性限止器及组合式铝合金轮毂组成,质轻且弹性大,对月面环境有较好的适应性,有利于提高载人月球车在崎岖月表的移动性能。
[1] 邓宗全,范雪兵,高海波,等.载人月球车移动系统综述及关键技术分析[J].宇航学报,2012,33(6):675-689.[Deng Zong-quan,Fan Xue-bing,Gao Hai-bo,et al.Review and key techniques for locomotive system of manned lunar rovers[J].Journal of Astronautics,2012,33(6):675 -689.]
[2] Matrossov S,Bogatchev A,Kutcherenko V,et al.Summary the Russian finish cooperation in robotics[C]. International Workshop on Adaptive Robots & GSLT,Petersburg,Russia,2004.
[3] Anthony H Y.From concept to reality[M].The United State:Springer New York,1978:281-310.
[4] Lee C,Dalcolmo J,Klinkner S,et al.Design and manufacture of a full size breadboard exomars rover chassis[C].9th ESA Workshop on Advanced Space Technologies for Robotics and Automation,Noordwijk,the Netherlands,2006.
[5] Vivake A,Damon D,Colin C.The development of wheels for the Lunar Roving Vehicle[J] Journal of Terramechanics,2009,(46):89-103.
[6] А·Л·杰姆尔德日安,В·В·格罗莫夫,И·Ф·卡茹卡罗等.星球车[M].马菊红译.北京:中国宇航出版社,2011:305-309.
[7] 付宜利,徐贺,王树国,等.沙地环境移动机器人驱动轮的发展概况综述[J].机器人技术与应用,2004,(4):22-29.[Fu Yi-li,Xu He,Wang Shu-guo,et al.A overview on the propulsive wheel of mobile robot in sand terrain[J].Robot Technique and Application,2004,(4):22 -29.]
[8] 孙鹏,高峰,李雯,等.深空探测车可变直径车轮牵引通过性分析[J].北京航空航天大学学报,2007,33(12):1404-1407.[Sun Peng,Gao Feng,Li Wen,et al.Research of traction trafficability of variable diameter wheel for planetary rover[J].Journal of Beijing University of Aeronautics and Astronautics,2007,33(12):1404 -1407.]
[9] 陈泽宇.适用于月球车的可伸缩叶片复式步行轮的研究[D].吉林:吉林大学,2007.[Chen Ze-yu.Research of a compound walking wheel having retractile laminas with application to lunar rover[D].Jilin:Jilin University,2007.]
[10] 丁亮,高海波,邓宗全,等.月球车轮刺效应的理论分析与实验研究[J].宇航学报,2009,30(4):1351-1358.[Ding Liang,Gao Hai-bo,Deng Zong-quan,et al.Theoretical analysis and experimental research on wheel lug effect of lunar rover[J].Journal of Astronautics,2009,30(4):1351 -1358.]
[11] 张朋.月球车移动系统构型综合与ALR原理样机的研制[D].哈尔滨:哈尔滨工业大学,2009.[Zhang Peng.Research on configuration synthesis of lunar rover locomotion system and development of ALR principle prototype[D].Harbin:Harbin Institute of Technology,2009.]
[12] 庄继德.计算汽车地面力学[M].北京:机械工业出版社,2001:2-12.
[13] 余志生.汽车理论[M].北京:机械工业出版社,2009:263-264.
[14] 高海波,贾阳,邓宗全,等.月球车弹性筛网轮的研制[J].哈尔滨工业大学学报.2008,40(11):1712-1716.[Gao Haibo,Jia Yang,Deng Zong-quan,et al.Development on spring griddle net wheel of lunar rover[J].Journal of Harbin Institute of Technology,2008,40(11):1712 -1716.]
[15] Apostolopoulos D S.Analytical configuration of wheeled robotic locomotion[R]. Pittsburgh, Pennsylvania:The Robotics Institute of Carnegie Mellon University,April 2001.
[16] 张克健.车辆地面力学[M].北京:国防工业出版社,2001:104-129.
[17] Bekker M G.Introduction to Terrain-vehicle systems[M].The University of Michigan Press,1969:334 -336.
[18] 张宁.铝合金轮毂受力状态的有限元分析与优化设计[D].重庆:重庆大学,2010.[Zhang Ning.Finite element analysis and optimum design of aluminum alloy wheel’s forced state[D].Chongqing:Chongqing University,2010.]
[19] 张辰光.铝合金轮毂的造型设计与结构分析[D].河北:河北工业大学,2000.[Zhang Chen-guang.Shape design and structural analysis of aluminum alloy hub[D].Hebei:Hebei University of Technology,2000.]
猜你喜欢
橡塑技术与装备(2022年6期)2022-06-02
汽车实用技术(2022年5期)2022-04-02
导弹与航天运载技术(2021年1期)2021-03-01
汽车实用技术(2021年3期)2021-02-24
矿业工程(2020年6期)2020-02-01
百科知识(2019年5期)2019-03-18
太空探索(2016年9期)2016-07-12
中学科技(2015年7期)2015-07-03
汽车与驾驶维修(汽车版)(2015年8期)2015-03-25
城市建设理论研究(2014年25期)2014-09-24