列车TCU开发平台的研制
2014-12-17 08:52胡继胜
仪器仪表用户 2014年5期
张 晶,胡继胜
(大连交通大学 交通运输工程学院,辽宁 大连 116028)
0 引言
列车电力牵引系统通常由主电路和控制系统组成。其中,牵引变流控制系统TCU(Traction Control Unit)是整个牵引控制系统的核心部分,它通过控制牵引变流器的运行,实现对列车电力牵引工况和电气制动工况的控制。为了完成对TCU控制策略的开发,需构建与现行列车牵引变流系统运行模式相同的模拟运行系统,利用该系统可以进行对牵引变流控制系统控制策略的开发,研究的成果可以移植到列车控制系统中。整个试验平台由牵引变流控制系统动力平台和TCU控制策略开发平台组成,其中动力平台为TCU研发平台提供了一个小功率被控对象,在本文开发的试验平台上可以实现TCU对牵引变流系统控制的模拟以及对TCU控制策略的研发。
1 牵引变流控制系统动力试验平台
为了保证TCU的控制策略所依靠的试验平台与现行列车电力牵引系统运行模式相同,需构建能量互馈型列车牵引变流控制系统动力试验平台。利用该平台可以模拟交-直-交(干线铁路)及直-交(城轨列车)电力牵引变流控制系统。
1.1 动力试验平台总体结构
系统构建的与现行牵引变流系统运行模式相同的牵引变流控制系统动力试验平台结构,如图1所示。
整个系统由被试系统和陪试系统构成。陪试系统为列车模拟运行系统,可作为负载供被试系统使用。被试系统由变压器、被试机、四象限脉冲整流器、牵引逆变器、制动单元、模拟信号发生器和TCU组成。
1.1.1 变压器
变压器与车载变压器功能一致,为隔离变压器和斯科特变压器串联结构,其作用是将三相交流电变为单相交流电。试验平台具体要求为变压器工作频率50Hz,额定功率>10kw,输出电压为三相AC380V/单相AC330V。其中,隔离变压器将一次侧和二次侧的电气完全绝缘[1],即对系统起到隔离、防雷和滤波的作用,而斯科特变压器则是将电源处的三相交流电变成系统运行所需的单相交流电。
1.1.2 牵引变流器
变流器由牵引逆变器和四象限脉冲整流器构成。脉冲整流器将牵引变压器的牵引绕组输出的单相交流电变换成直流电,系统规定整流器输出的直流电压为DC500~700V连续可调,在电网电压或负载发生变化时,能够维持中间直流电压的稳定,功率因数>96.5%。牵引逆变器是牵引传动系统的电动机驱动侧变流器,可将中间直流环节的直流电压变换成电压、电流、频率按照牵引特性要求控制的三相交流电[2]。
1.1.3 牵引变流控制系统TCU
牵引变流控制系统TCU是用于列车的控制产品,其作用是通过检测列车的运行状态,接收司机控制器的运行指令,来控制四象限脉冲整流器和牵引逆变器的正常工作,从而控制系统的功率因数以及直流环节电压的稳定。
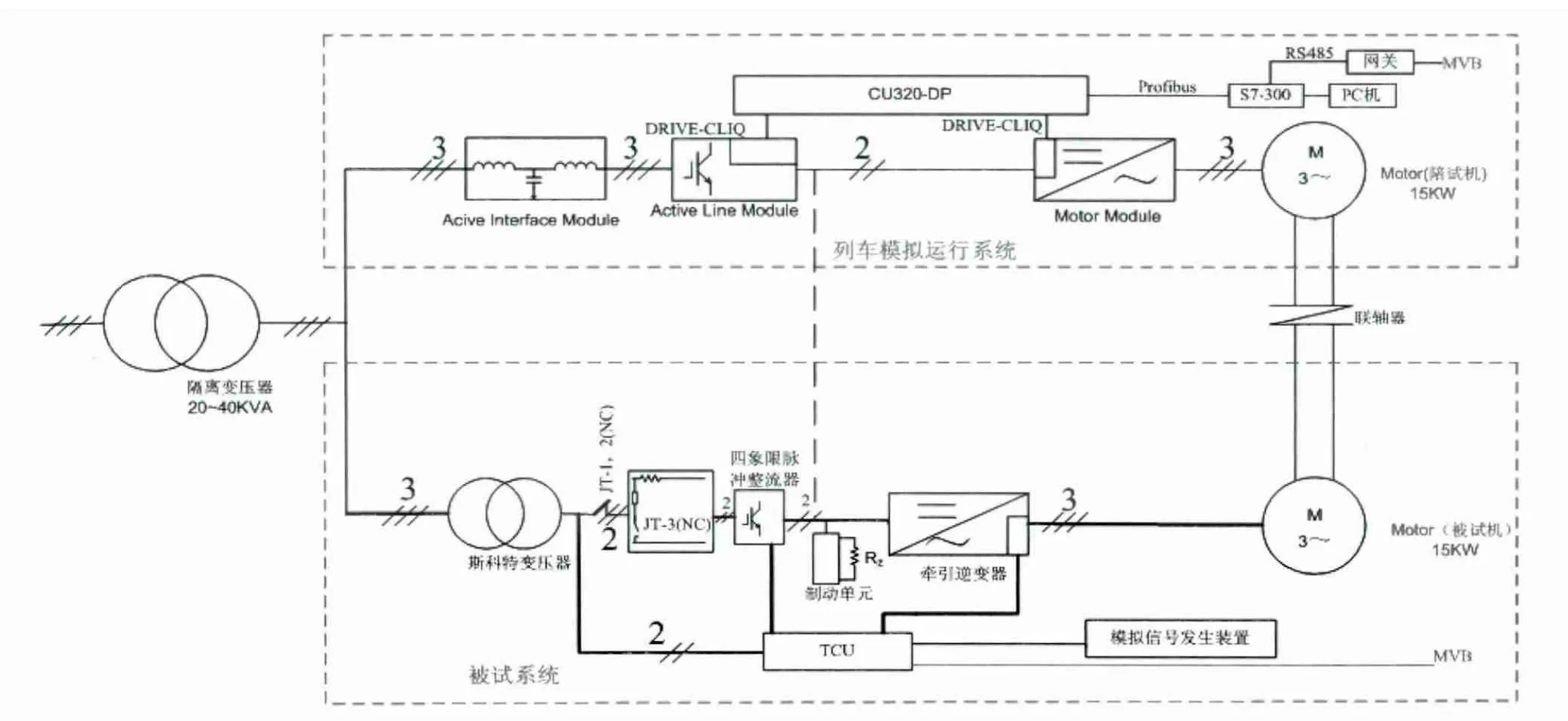
图1 牵引变流控制系统动力试验平台结构框图Fig.1 Traction converter dynamic test platform of control system block diagram
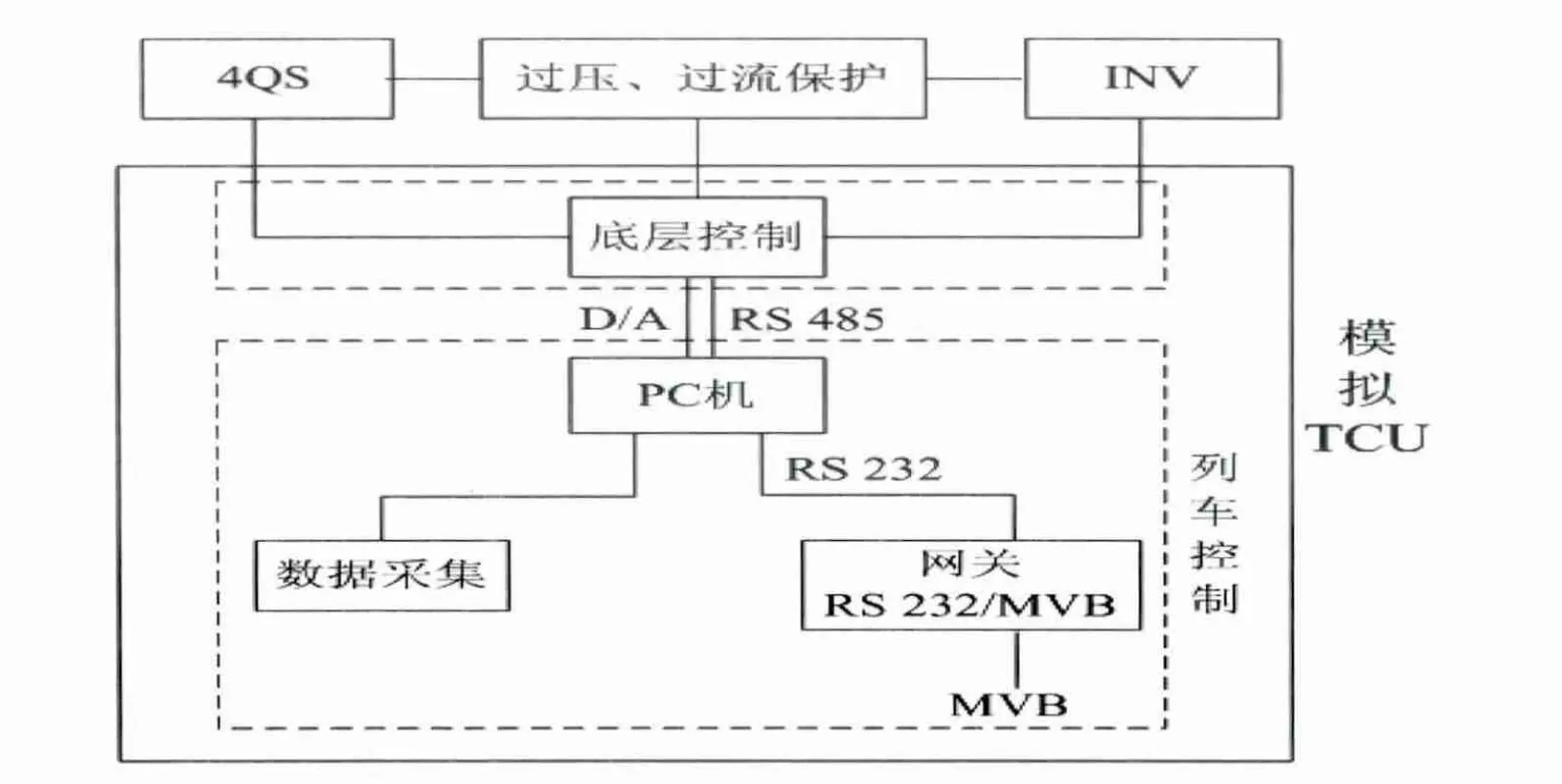
图2 TCU控制策略开发平台结构框图Fig.2 TCU control structure strategy development platform
1.2 动力试验平台的交-直-交运行模式
现行干线铁路交-直-交电力牵引系统,电能的输入为单相交流输入,本系统采用斯科特变压器可以将三相交流电变为单相交流电输出,使四象限脉冲整流器的输入侧为单相交流电,这与现行牵引系统相同,同时牵引逆变器输出侧为三相交流电输出,也满足现行电力牵引系统的要求。由于四象限脉冲整流器和牵引逆变器组成的牵引变流系统的运行情况与现行的列车牵引变流系统相同,所以可在此平台上实现对交-直-交牵引系统TCU的开发。
1.3 动力试验平台的直-交运行模式
本试验平台为能量互馈式试验台,在模拟交-直-交牵引系统时,能量在三相交流电处进行反馈,如果被试系统和陪试系统的直流环节直接相连,如图1中虚线所示,则此平台在直流环节就进行能量反馈,此时整个试验系统按照与现行城轨列车相同的直-交运行模式运行。
因此,本试验系统可以模拟现行干线铁路和城轨列车的运行模式,可以利用此动力平台完成对TCU相应模式下的开发。
2 TCU控制策略开发平台
TCU控制策略开发平台,既可以实现对牵引变流系统的控制又能完成对TCU控制策略的开发。
2.1 TCU控制策略开发平台
为了实现对TCU控制策略的开发,构建了如图2所示的控制策略开发平台。由于本试验系统着重研究TCU的列车控制策略,同时为了便于对列车控制策略的开发,所以系统中将底层控制与列车控制进行分开研究。
底层控制部分采用成熟的控制产品,来保证TCU对牵引变流器基本控制功能的实现,具体过程为:TCU控制系统接收MVB总线和采集卡输出的司机控制指令,然后由RS 485总线传输给底层控制系统,底层控制系统通过控制牵引变流器,实现对电机的矢量控制,同时底层控制系统控制四象限脉冲整流器以及牵引逆变器工作,进而实现对系统的功率因数以及直流电压的控制。同时,为了便于以后对系统底层控制系统的自行开发,配置了底层控制的接口模块,可以直接在相应的位置对底层控制的算法进行更改。
列车控制部分的主要功能是采集列车的运行状态和司机的操作指令,进而确定牵引电机的电磁转矩,并把电磁转矩通过串行通信或者模拟输出的方式,传输给底层控制系统,最终实现对电机的控制。
2.2 TCU开发平台的功能模块
TCU的开发平台具有列车状态模拟信号生成功能,数据采集、分析功能以及系统通信功能等。
2.2.1 列车信号的产生
列车运行的状态信号可以通过动力平台以及相应的信号发生装置提供。其中,轴重信号、司机操作信号均可采用信号发生装置来生成,而列车的转速信号,则需要动力平台和信号发生装置来共同实现。动力平台可以模拟列车的一根轴的轴速信号,其余的测量信号则需要信号发生装置来提供。
2.2.2 信号的采集
由TCU的控制功能可知,TCU控制策略研发平台需要采集空气弹簧压力信号,转速信号,轴重信号,司机操作手柄位信号等。其中轴重信号、空气弹簧压力信号为模拟信号,转速信号为正交编码信号,司机操作手柄位信号为数字I/O信号。
为了采集这些数字信号、模拟信号,系统采用NI公司的PCI-6229数据采集卡以及LabVIEW图形化编程软件[3]。PCI-6229为NI公司的 M系列数据采集卡,本卡有16位32路模拟输入通道;16位4路模拟输出通道和48路数字I/O通道;2个分辨率为32位的定时/计数器,1个频率发生器;内部时钟频率为80MHz,A/D转换器的分辨率为16位,采样率为2501kS/s。该板卡的模拟输入、输出电压范围均是±10V,支持数字触发以及DAQmx的数据采集方法[4]。由于本卡具有A/D转换功能,所以采集卡可以采集空气弹簧压力、列车轴重等模拟信号。又由于采集卡具有数字I/O接口以及对正交编码信号的采集功能,因此,采集卡可以采集司机操作手柄位的数字I/O信号以及由正交编码器产生的列车轴速等数字信号。
2.2.3 通信系统
系统的通信部分采用MVB总线和RS485,RS232串行通信总线相结合的方式进行控制,系统网关具有RS232和MVB自动转换的功能。首先,TCU中的网关通过MVB总线接收司机控制器的控制指令,然后再通过RS232串行总线将数据传输到PC机中,PC机结合PCI-6229采集卡采集的信息,自动调整牵引力和电制动力的大小,然后通过RS485总线或者模拟端口将转矩信息传输给底层控制系统,底层控制系统按照指令实现对四象限脉冲整流器和牵引逆变器的控制,并完成过流、过压保护的功能。
至此,牵引变流控制系统TCU的控制功能得以全部实现。同时,由于系统采用了PC机作为系统组件,所以可以使控制系统获得良好的控制操作界面,便于对程序的后续开发。
3 TCU列车控制策略的研发
对于TCU各个单项控制策略的开发,可以通过MVB总线或者PCI-6229数据采集卡的D/A转换功能来接收司机操作指令,采集列车的运行状态,并按照列车的控制策略,通过PC机产生电磁转矩控制信号,并将其送入底层的控制系统中,从而实现TCU相关功能的模拟。按照此种模式,系统可以进行恒速控制策略,列车牵引特性控制策略,粘着控制等控制策略的开发。
3.1 恒速控制策略开发
为了使列车在一定速度范围内稳定运行,采用恒速控制策略,如图3中的CRH3动车组恒速控制曲线。当给定速度与列车实际运行速度的差值△v>5km/h时,列车进入牵引控制模式;当-5≤△v≤5km/h时,列车进入恒速控制模式;当△v<-5km/h时,列车进入再生制动模式[5]。
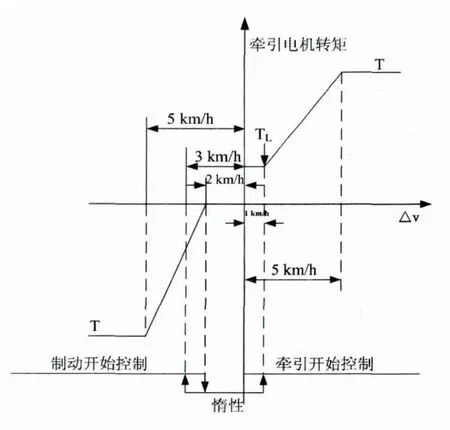
图3 CRH3动车组恒速控制曲线Fig.3 Constant speed control curve of CRH3 EMU
本系统构建的TCU控制系统,可以实现与真实列车相同的恒速控制功能,具体方法如下:
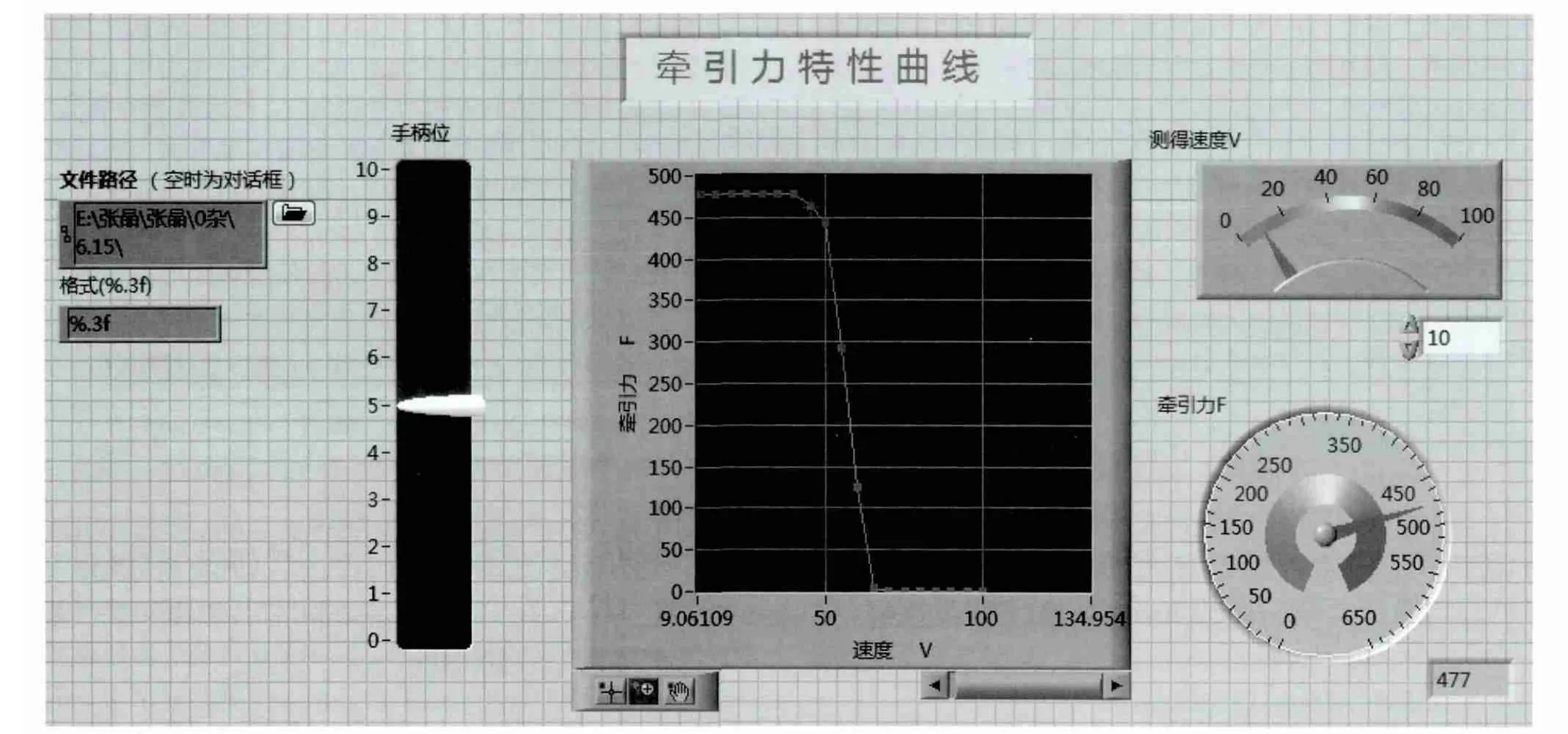
图4 牵引特性曲线控制Fig.4 Traction characteristics curve control
通过TCU的数据采集模块,采集列车四根轴的轴速信号,取速度平均值V作为速度检测的标准。当列车的实际运行速度V恰好等于给定速度V1,或者与给定的速度V1的速度差△v在给定的误差范围之内,则列车在此速度下稳定运行;当列车的运行阻力由于线路、环境等因素发生变化并最终导致实际速度V不等于给定速度V1,或者速度差△v超过给定范围时,采用速度差-转矩控制法,即转矩按照速度偏差进行恒速控制,然后通过计算输出转矩T1,再由RS 485总线将转矩值传输给底层控制系统,底层控制系统按照指令调整牵引变流器转矩的大小,即控制列车的牵引力与制动力的值。至此,TCU实现了对列车的恒速控制。
3.2 牵引特性控制策略开发
列车牵引特性是指列车轮轴牵引力F与机车运行速度V之间的关系F=f(ν)[6]。系统模拟的TCU控制系统可以实现对列车牵引特性的控制。
首先,TCU通过网关接收来自MVB总线的司机控制器的控制指令,然后通过网关将控制信号传输给PC机,PC机通过牵引特性控制软件,结合PCI-6229数据采集卡采集到的列车速度信号以及MVB总线传输的控制信号,自动调整列车运行所需的牵引力和制动力的大小,最后通过RS485总线或者模拟输出端口将计算值传输给底层控制系统,实现对牵引变流系统的控制,如图4所示。
3.3 粘着特性控制策略开发
由于列车的运行过程中,必须保证轮轨在粘着状态下运行,所以粘着控制成为TCU控制策略的一大重点内容。本系统通过PCI-6229数据采集卡采集列车四根轴的轴速信号、速度差信号、加速度和减速度信号等,并结合相应的粘着控制方法(比如组合校正法、模糊控制法和正交相关法等方法[7]),计算列车的粘着牵引力F1,然后与列车牵引力F2进行比较,两者中的较小值Fmin,为列车运行控制所需的实际牵引力F,牵引力F通过RS485总线或者模拟输出端口传输给TCU的底层控制系统,完成对牵引变流器的粘着控制。
4 结束语
系统构建适用于干线铁路和城轨列车的牵引变流控制系统(TCU)的开发试验平台,为研究现行列车上的TCU的运行情况提供了良好的仿真环境。利用该系统可以实现对牵引变流系统的控制功能,以及对TCU控制策略的研发,本次的研究成果可以移植到列车控制系统中,实现对现行列车的牵引变流系统的研发。
[1]朱正会.隔离变压器在电网中的应用分析[J].电气技术,2013,08:80-81,88.
[2]宋雷明.动车组传动与控制(第1版)[M].北京:中国铁道出版社,2009.
[3]龙华伟,顾永刚.LabVIEW 8.2.1与DAQ数据采集[M].北京:清华大学出版社,2013.
[4]林朝阳,叶晓慧,姚祖文.基于PCI-6229的数据采集方法[J].舰船电子工程,2007,06:148-150,154,202.
[5]丁菊霞,蒋奎.CRH_3动车组两种恒速控制策略研究与仿真[J].铁道机车车辆,2013,06:73-77.
[6]孙中央.列车牵引计算实用教程[M].第2版.北京:中国铁道出版社,2005.
[7]王颖超.高速动车组粘着控制算法研究[D].北京:北京交通大学,2009.
猜你喜欢
都市快轨交通(2022年2期)2022-06-28
电力设备管理(2022年7期)2022-05-31
新医学(2022年4期)2022-04-23
中国测试(2022年2期)2022-03-19
中国临床护理(2019年5期)2019-09-21
水利水电工程设计(2019年4期)2019-02-14
爱你(2018年35期)2018-12-15
制造技术与机床(2017年8期)2017-11-27
装备制造技术(2017年6期)2017-07-31
科技与创新(2016年12期)2016-06-25