舰载光电目标跟踪系统三轴支撑框架驱动机构控制
2014-12-19 08:35苏晓丹
舰船科学技术 2014年12期
苏晓丹
(海军驻航天科工集团二院军代表室,北京100845)
0 引 言
舰载光电探测系统是指安装在舰艇上借助激光技术、红外技术、电视技术、纤维光学、集成光学、自适应光学和图象处理技术等,利用目标和背景反射或辐射的光信号差异,对目标进行探测、识别、跟踪和瞄准的系统,主要有低能级电视摄像仪、激光测距仪、热视摄像仪等,是20 世纪60 年代以来迅速发展的新型探测系统。这类系统的优点是隐蔽性好、对低空和超低空目标探测能力强、跟踪测量精度高。它与电子、雷达、声磁等侦察设备相互辅助、互为补充,共同组成一个完整的侦察探测跟踪系统[1-2]。
使电视摄像机、热视仪等图形传感器的光轴连续地与朝向目标的方向重合,这是可视化计算机式目标跟踪系统的任务。从原理上来说,可以使用两轴支撑框架解决使视频传感器光轴连续地与朝向目标的方向重合问题,但在活动基座条件下跟踪活动目标时,视频传感器会相对背景态势转动,这会明显加剧可视化计算机装置发现并估计目标在当前图像中坐标的困难。若使用三轴支撑框架就能够克服上述困难。
当把光电探测跟踪系统安装在水面舰艇这类的活动载体上时,由于风浪会引起舰艇的摇摆,所以在形成支撑框架的转动控制律时,要考虑输入到该系统中的舰艇当前姿态角的信息,本文就介绍推导这种情况下的框架关系及控制律形成问题[3]。
1 系统组成及空间框架关系
可视化计算机式目标跟踪系统的功能框图如图1 所示,它包括可视化计算机装置,其任务是估计被跟踪目标在视频传感器图像中的坐标并形成支撑框架各环的角位置;使支撑框架环相对其转轴转动的随动式驱动机构和框架角传感器。

图1 可视化计算机式目标跟踪系统的功能框图Fig.1 Functional block diagram of target tracking system for visualized computer
视频传感器安装在三轴支撑框架上,通过三轴支撑框架的驱动机构实现视频传感器光轴空间方位的控制。
安装在水面舰艇上的三轴支撑框架方案如图2所示,视频传感器的平面图如图3 所示,其中P 为被跟踪目标的中心位置。用机电式驱动机构使支撑框架的角度变化,以实现安装视频传感器的平台台体的空间姿态控制。
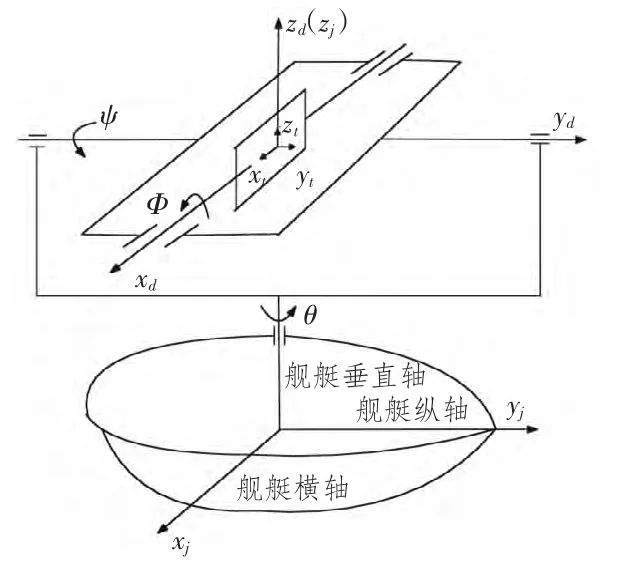
图2 安装在水面舰艇上的三轴支撑框架结构示意图Fig.2 Schematic figure of tri-axis supporting frame fixed on the surface ship

图3 视频传感器平面图Fig.3 Plane diagram of video sensor
定义以下坐标系:台体坐标系Otxtytzt,其Oyt轴与视频传感器的光轴重合;地面坐标系Odxdydzd,Oxdyd平面与当地水平面平行;舰体坐标系Ojxjyjzj,其原点位于舰艇的摇摆中心,坐标轴与舰艇的结构轴重合,oyj轴沿舰体纵轴指向舰首。在舰艇摇摆角和支撑框架角θ,ψ,φ 都等于0 时,上述3 个坐标系的相应轴平行。
再引入一个目标方位坐标系Omxmymzm,它描述安装有视频传感器平台台体Otxtytzt需要的(给出的)空间位置。坐标轴Oym的空间指向确定光轴在地面坐标系Odxdydzd中的方位,可以用坐标轴Oym的方位角θm和高低角φm给出坐标系Oxmymzm相对地面坐标系Oxdydzd的方位。在空间搜索状态,方位角θm和高低角φm可以由操作手或者是程序给出,而在目标自动跟踪状态,应该在支撑框架角和舰艇摇摆角当前值下根据图象中的目标坐标值计算出来。
如图4 所示,由地面坐标系Odxdydzd到目标方位坐标系Omxmymzm的坐标转换矩阵为
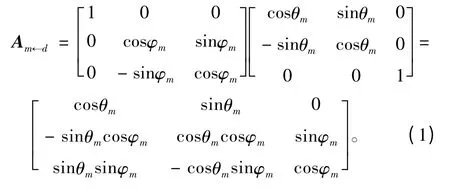

图4 地面坐标系Odxdydzd 到目标方位坐标系Omxmymzm 的转换关系Fig.4 Conversion relation between Odxdydzd ground coordinate system and Omxmymzm target azimuth coordinate system
设舰艇的偏航角为α、纵摇角为β、横摇角为γ,则由地面坐标系Oxdydzd到舰体坐标系Oxjyjzj的坐标转换矩阵为
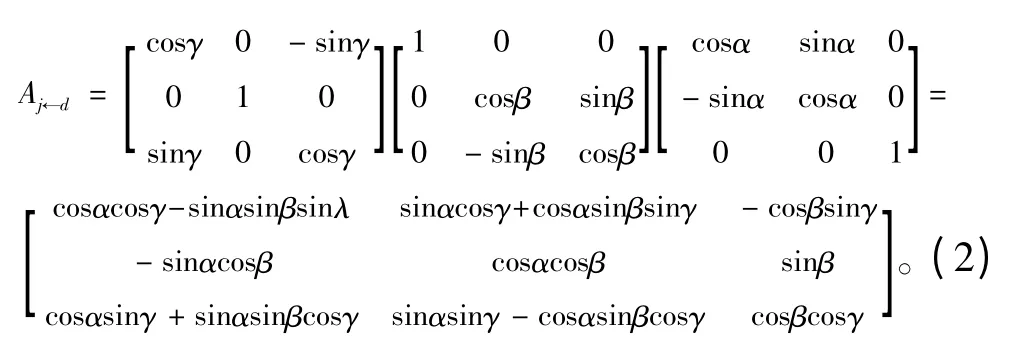
从舰体坐标系Oxjyjzj到目标方位坐标系Oxmymzm的坐标转换矩阵为
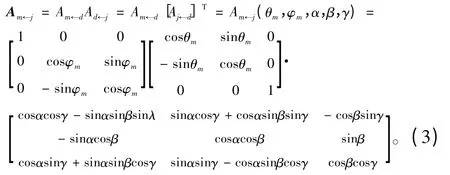
设支撑框架外环轴、内环轴和台体轴的转角分别是θ,ψ,φ,则由舰体坐标系Oxjyjzj到台体坐标系Oxtytzt的坐标转换矩阵为

2 框架转动控制律设计


式中Am←j(i,j)为矩阵Am←j(θm,φm,α,β,γ)的第i 行第j 列的元素。
在自动跟踪目标时,可以通过把朝向目标方向的矢量坐标由台体坐标系Oxtytzt转换到地面坐标系Oxdydzd而得到包含在Am←j(i,j) 中的角度θm,φm的值。可以根据视频传感器图像上目标中心的坐标来确定所指出的矢量在台体坐标系Oxtytzt中的投影。图5 给出了能够求解该问题形成视频传感器图像的模型。

图5 视频传感器图像的模型Fig.5 Image model of video sensor
取距离视频传感器光学系统R 处的与视频传感器光轴Oyt垂直的平面上形成的尺寸为2X1×2Z1的图像ABCD,视场角为2θM×2φM。认为图像ABCD上的任意一点只可以接受经过给定点和光学系统中心O 的光流。
设图像ABCD 上坐标为(ΔX1,ΔZ1)的P1点对应目标中心,朝向目标的矢量OP1在台体坐标系Oxtytzt中的投影是:

矢量的方向不随其大小而变化,可以把式(7)写成
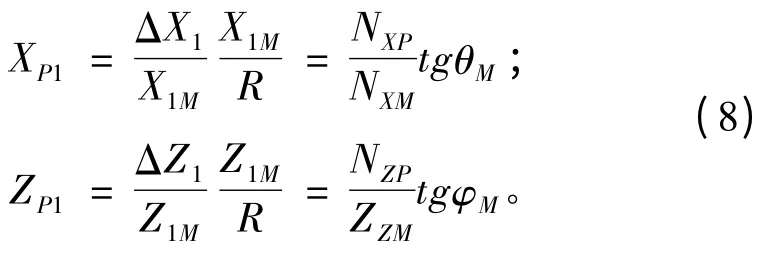
式中:NXP,NZP为P1点对应的像素数量;NXM,NZM为图像ABCD 上半幅对应的像素数量。
为了确定角度θm,φm,把所得到的矢量在台体坐标系的投影转换到地面坐标系:
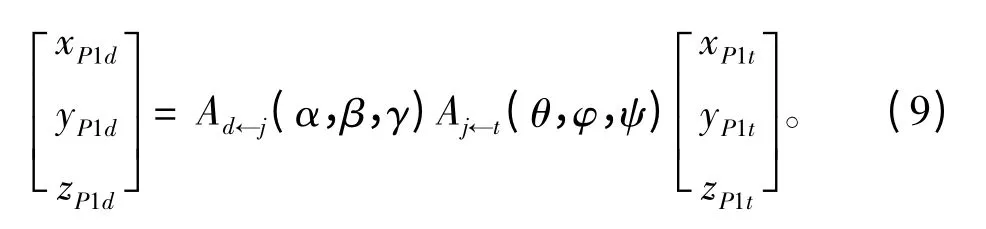

根据坐标(xP1d,yP1d,zP1d),就能通过下面的表达式,确定指向被跟踪目标方向的方位角θm和高低角φm。为了确定方位角θm和高低角φm所需要的框架角组合,要在与视频传感器上得到图像同步的时刻从相应的传感器上采集舰艇摇摆角α,β,γ 以及支撑框架角θ,φ,ψ,进而形成框架角组合。
应该指出的是,所推导的比较复杂的图像处理算法可能导致在确定所需要的框架角组合时的时间延迟,有关被跟踪目标坐标的信息可能短时间衰落,图像输入频率低于从支撑框架角度传感器上输出信息的频率,这些因素可能降低跟踪目标的精度。显然,为了补偿可视化计算机式目标跟踪系统给出处理结果时的延迟,对目标角运动轨迹进行统计预测、提高转角数值的给出频率到转角传感器的频率、当目标信息衰落时根据预测值组织跟踪系统的运动,这些措施能明显提高跟踪目标的精度。
3 结 语
本文介绍了安装在水面舰艇上的用于计算机式目标跟踪系统的视频传感器三轴支撑框架结构,利用所定义的相应坐标系,推导了考虑舰艇摇摆时支撑框架角、舰艇摇摆角和目标方位角之间的关系式,研究了保证跟踪目标的框架驱动机构控制量的形成方法,提出了提高目标跟踪精度的建议。
[1]陈福胜,裴晓黎. 浅析舰用光电探测系统的几个问题[J].舰船科学技术,2002,24(5):28 -32.CHEN Fu-sheng,PEI Xiao-li. A discussion on shipborne electro-optical detection systems[J]. Ship Science and Technology,2002,24(5):28 -32.
[2]于起峰,尚洋.摄像测量学原理与应用研究[M]. 北京:科学出版社,2009.
[3]БААлпатов. ОЕБалашов. АИСтепашкин. Формированиеуправленияприводамитрёхосногокард нногоподвесавсистемесопровожденияобьектов. Изв. вузов. Приборостроение2006No5.
[4]李殿璞.船舶运动与建模(2 版)[M]北京:国防工业出版社,2008.
猜你喜欢
环球时报(2022-12-30)2022-12-30
凤凰动漫(军事大王)(2022年3期)2022-06-17
导航定位学报(2022年2期)2022-04-11
摄影之友(2020年12期)2020-12-23
电脑爱好者(2018年17期)2018-11-05
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21
兵器知识(2017年10期)2017-10-19
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
中国科技纵横(2016年23期)2017-04-06