逆合成孔径雷达成像距离指标考核∗
2015-01-22 10:18
雷达科学与技术 2015年3期
(中国电子科技集团公司第二十研究所,陕西西安710068)
0 引言
ISAR成像是通过发射大带宽信号实现目标各散射单元在纵向上的高分辨率,同时由于非合作目标相对于雷达的姿态转动,使目标上各个散射单元的多普勒频率不同,实现目标各散射单元横向上的高分辨[1-3]。
由于相控阵天线移相器所提供的相移值不能匹配发射或接收信号频率变化,因此利用相控阵雷达直接得到高质量的ISAR图像受到限制,调频步进逆合成孔径雷达成像距离计算方法,这部分工作具有开创性,满足包络对齐处理所需信噪比的约束时成像距离计算方法和满足图像能见度约束时成像距离计算方法[4],从两条技术途径或者说两个不同的侧重点,开展了调频步进雷达成像距离计算方法的研究,完善了ISAR这一部分的研究工作,为雷达参数选择提供了设计依据,同时提出了图像质量评价的另外一个技术途径,用图像能见度指标衡量成像质量。
目标的成像距离是ISAR的一个重要指标[5]。从常规的雷达距离方程可以知道,雷达的最大作用距离与信号的信噪比相关,但成像雷达的作用距离与成像处理过程中所需的最大信号信噪比有关,或者与目标占据的成像分辨单元的数目、所允许的成像最小能见度、高分辨雷达的目标雷达散射面积(Radar Cross Section,RCS)以及像素的信噪比等有关。
1 成像距离计算
ISAR成像距离计算在工程应用中十分关键,是雷达参数设计的基础。在工作的开展过程中,有关成像雷达的距离计算方面的参考文献较少,因此,成像雷达距离计算是本文研究的重要方面。
成像雷达的距离计算依然遵从雷达距离方程,但是参数选择受到成像算法的制约。以下从两个方面计算成像雷达的作用距离。在成像处理中包络对齐是最基本的处理环节,直接影响成像质量。通过反复的实践得到包络对齐所需的信噪比在10~12 dB时,才能够进行包络对齐处理,当然调频步进逆合成孔径成像雷达利用步进方式合成高分辨距离像,雷达方程中的信号带宽远小于合成后的信号带宽,在此基础上可以得到雷达最大成像距离。另外一种方法,是考虑成像像素的可见度,根据雷达方程随着像素可见度的降低,雷达最大成像距离增加。
1.1 满足包络对齐处理所需信噪比约束时成像距离计算
已知雷达距离方程:

取对数以分贝(dB)示为:
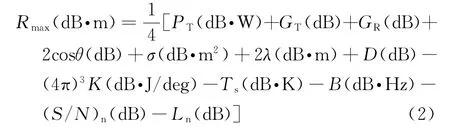
式中,Rmax为雷达最大成像距离;PT为发射机峰值功率,PT=240 W;GT为发射天线增益,GT=34 dB;GR为接收天线增益,GR=35 dB;cosθ为雷达波束扫描角,θ=0°~30°;σ为目标散射面积;λ为雷达工作波长,λ=5.45 cm;D为脉冲压缩增益;K为玻耳兹曼常数,K=1.38×10-23J/K;Ts为天线等效温度系数,Ts=290 K;B为接收机中频带宽,B=45 M Hz;(S/N)n为包络对齐处理所需信噪比,(S/N)n=10 dB;Ln为系统损耗,Ln=12 dB。雷达方程中部分参数的取值如表1所示。
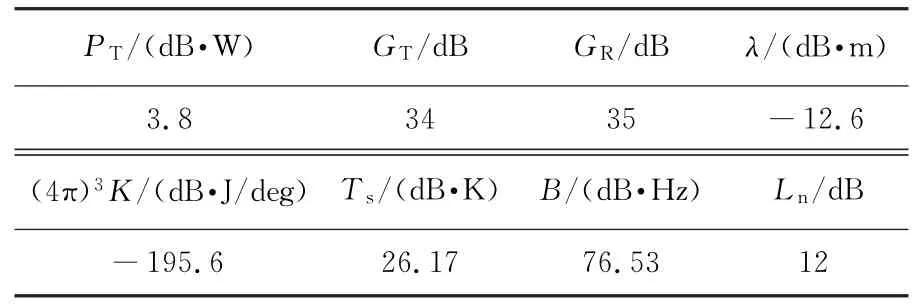
表1 雷达方程中部分参数的取值
在高分辨率雷达中,目标的散射面积σ采用参考文献[1]中的计算方法:

式中,σw为目标宽带散射面积,σn为目标窄带散射面积,ms为目标在纵向距离单元分布的距离单元数。对于桨状飞机来说,σn=10 d Bm2,翼展×机长=24 m×24 m,对于歼七飞机来说,σn=2 dBm2,翼展×机长=15 m×15 m。采用调频步进方式合成高分辨一维距离像,发射信号瞬时带宽取40 M Hz,考虑加权等因素,则粗分辨可以达到6 m。假设目标散射点均匀分布时,成像时目标的σn为目标窄带散射面积,ms的取值如表2所示。
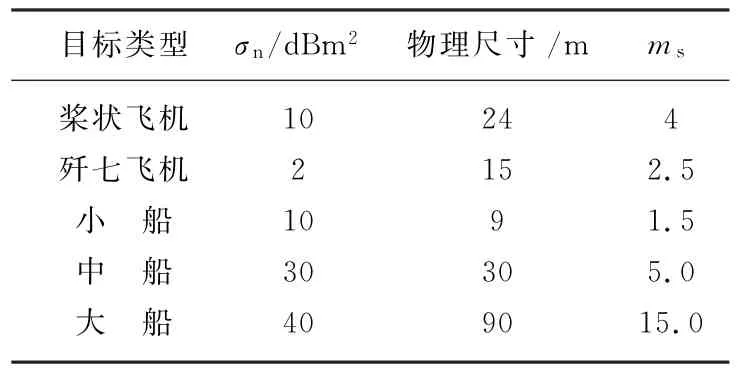
表2 窄带散射面积和纵向距离单元分布的距离单元数取值
发射脉冲宽度分别选取,合成后带宽为640 MHz,脉冲压缩的增益取值如表3所示。

表3 不同时宽脉冲压缩处理增益
考虑包络对齐处理所需信噪比的约束(S/N)n=10 dB,发射脉冲宽度分别选取5,10,20和40μs,波束扫描角分别选取0°时,雷达最大成像距离如图1所示。
用雷达进行目标检测时,常常采用窄带的发射波形,因此目标的散射面积是目标上所有散射体的和,而雷达成像时,ISAR能够把孤立的目标分解到二维距离和多普勒维。因此在成像雷达方程中目标的散射面积应该是目标上单个可分辨空间单元的横截面积。

图1 波束扫描角为0°时5种目标的最大成像距离
这样目标的成像距离与目标的大小、分辨能力的高低相关。例如,如果目标的尺寸小于窄带雷达的一个分辨单元的尺寸时,成像雷达的分辨能力越高,成像雷达目标散射面积越小,则成像距离越近;目标尺寸越大,成像距离越远。
1.2 满足图像能见度约束时成像距离计算
雷达对目标检测与雷达对目标成像两种方式在形式上很类似,但在本质上区别很大,雷达对目标检测的结果是在虚警概率和检测概率一定的条件下,有无目标存在;雷达成像不存在有像无像的问题,只是成像质量好坏的问题。距离雷达近的目标成像质量要好,成像目标的图像包含目标上的高散射系数和低散射系数散射体产生的可视像素,远一些的目标成像质量差一些,随着距离的增加低散射系数散射体的回波信号被噪声淹没。成像距离与图像的质量紧密相关。
雷达发射窄带脉冲,在检测距离为R、信噪比为S/N时目标的平均散射面积为

保持雷达所有参数不变,雷达工作在成像模式下,当雷达工作在宽带线性调频方式时,一次脉冲可以得到一个一维高分辨距离像;当雷达工作在调频步进方式时由N个脉冲得到一个一维高分辨距离像。如果定义GP为雷达在成像模式工作时,多个脉冲积累得到的图像处理的增益,成像模式工作时由于雷达的高分辨能力,目标被分解,定义被分解的目标散射面积为γ时,在距离为R处,ISAR的图像中是可视的,对应像素的信噪比为(S/N)V,低于γ的目标在ISAR图像中是不能够观测到的。则

当γ表示了在最大单个脉冲检测距离上,当信噪比为(S/N)V时目标的横截面积。当目标散射面积超过γ时,被分解的目标单元在ISAR图像中可视。最大单个脉冲检测距离上所观测到的目标单元的概率如图2所示。假设目标单元散射面积是瑞利分布的,对于这种分布的单元横截面积σe,其概率密度表示如下:

单元横截面积超过γ的概率为

式中,pe表示可视像素占被分解的所有目标单元的比值,是图像像素能见度的衡量指标,可以用图像像素的能见度来衡量图像质量。

图2 最大单个脉冲检测距离上所观测到的目标单元的概率
由此可以得到自由空间的成像距离:

调频步进合成后带宽为640 MHz,考虑加权等因素,分辨率为0.4 m,可以得到典型目标纵向距离单元分布单元数,如表4所示。
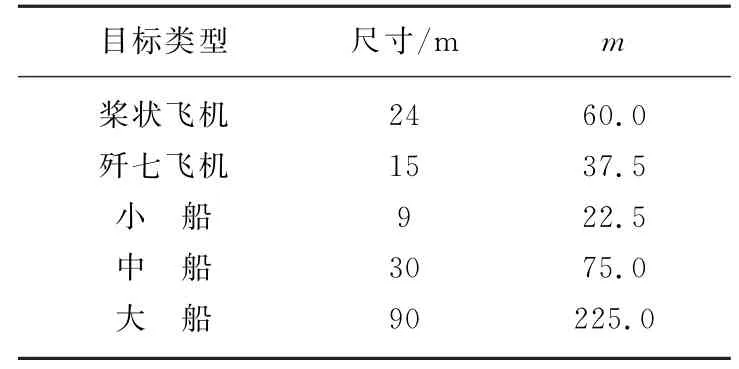
表4 纵向距离单元分布的距离单元数取值
从图3可以看出,5种目标的最大成像距离随像素可见度增加而降低。计算时波束扫描角为0°,发射信号脉冲为20μs。
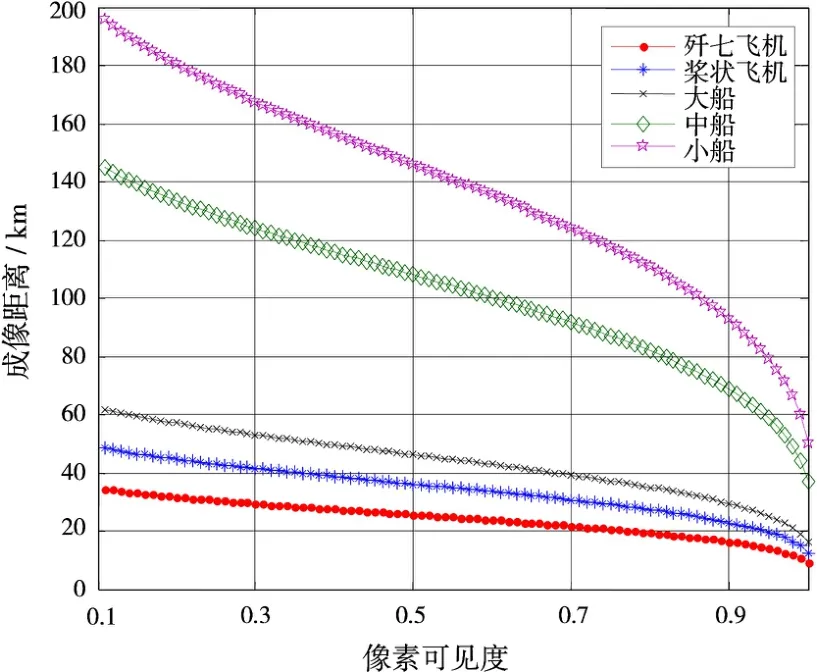
图3 5种目标的最大成像距离与像素可见度的关系
2 成像作用距离的考核方法
为了验证成像作用距离,可以采用外场实验模型和实际合作目标两种外场考核方法。
2.1 外场实验模型考核方法
外场实验模型考核方法是设计一个考核实验模型,如图4所示。转台上的球反射器根据指标的要求选择不同大小的雷达横截面积σ,比如σS=0.001 m2和σL=0.003 m2,转台的转动角速度可以控制。按战术使用要求选择雷达阵地,并精确测量其坐标;选择雷达阵地时避开影响雷达性能的电磁干扰,如高压线、通信设施等。将转台放置在合适的位置保持雷达与转台之间通视,控制转台转动,使在成像积累周期内转动角大于多普勒分辨所需的相干积累角,同时两个球反射体在横杆上相距多个距离单元。观察ISAR成像图像,可以看出当转台位于近距离处两个球反射器的ISAR像都可以看见,当转台位于远距离处两个球反射器的ISAR像都看不见了。由于目标的雷达横截面积一个大一个小,可以找到某距离处,能够在转台转动一周内均观察到大目标的ISAR像,小目标在接近雷达转动半周可见,而远离雷达半周不能观察到目标的ISAR像,记录此刻的距离R。根据雷达方程和雷达系统的设计参数,雷达对舰船目标(例如σ=500 m2),可以计算得到舰船目标的最大成像距离Rmax=aR,其中a=4σ/σL。最大成像距离满足系统原先设计指标要求时,对雷达的最大成像距离判定合格。

图4 成像作用距离考核外场实验示意图
外场实验模型考核方法利用标准转台模型,可以较为精确地测试成像雷达系统的威力范围。
2.2 实际合作目标的外场考核方法
实际合作目标的外场考核方法是选择真实的舰船作为目标,与上述方法一样,按战术使用要求选择雷达阵地,并精确测量其坐标。使目标船按照图5轨迹在海面上运动,目标船的运动速度保持在时速为20~30 km;令目标船从近处进入到距离雷达RA公里的A点;雷达搜索并发现目标,将目标所在位置置于成像窗口中心;目标船以半圆运动轨迹向距离雷达RB公里的B点运动,可以看出随着目标船远离目标图像的像素点越来越少,图像质量越来越差。认定一个图像质量可以接受的状态,令目标船在此距离处作掉头动作,即以此距离点为圆心作圆周运动,观察ISAR图像质量是否达到要求。如果满足要求,此距离处就是舰船目标的最大成像距离。如果成像质量不满足要求,那么令目标船向靠近雷达的方向移动后,再作掉头运动观察图像质量,确定舰船目标的最大成像距离;同理,如果成像质量较好,那么令目标船向远离雷达的方向移动,作掉头运动观察图像质量,确定舰船目标的最大成像距离。最大成像距离满足系统原先设计指标要求时,对雷达的最大成像距离判定合格。
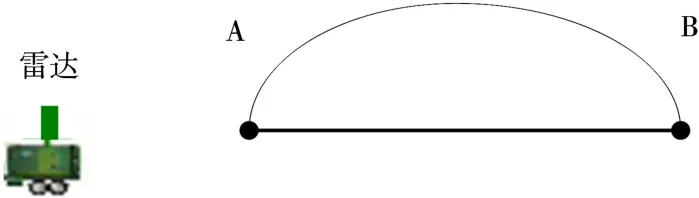
图5 成像作用距离考核中实际合作目标运动轨迹示意图
实际合作目标的外场考核方法受外界海情和人为因素影响大,在目标船作半圆运动时,海情高时ISAR图像质量一定比海情低时好;图像质量的好坏还没有客观定量的标准,主观因素在很大程度上会干扰最大成像距离的认定。
以上两种方法相比而言,第一种方法比第二种方法测量精确、受海情或主观影响小、试验场地易于寻找、标准易于统一、经济性好。
3 成像作用距离指标考核结果
雷达系统成像作用距离指标考核,按照实际合作目标的外场考核方法考核。在海军某试验场申请了两个航次的试验,令试验船从距雷达37.5 km处(B点)的海面,以图5的轨迹向靠近雷达的方向运动,直到距离雷达7.5 km(A点)时掉头返回,再驶向B点。在整个考核过程中,均能够观测到试验船的ISAR图像。
图6为试验船在37.5 km处的实时成像结果,中间图像为试验船一维距离像,上面图像为实时二维图像,下图为某距离单元瞬时多普勒频率。
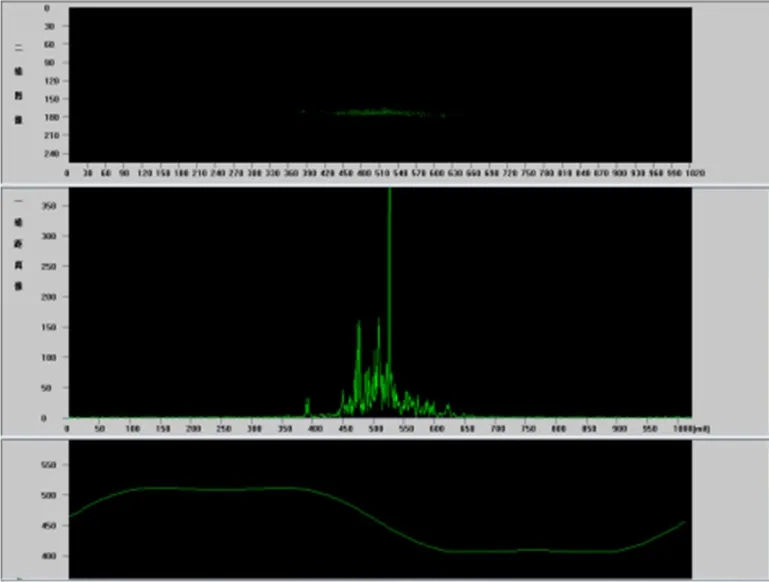
图6 试验船在37.5 km处的实时成像结果
4 结束语
考虑在ISAR成像处理中包络对齐是最基本的处理环节,直接影响成像质量。通过反复的实践得到包络对齐所需的信噪比在10~12 dB时,才能够进行包络对齐处理,在此基础上提出了满足包络对齐处理所需信噪比的约束时计算最大成像距离和满足图像能见度约束时计算成像距离的方法,并计算了所研制雷达系统的多种目标的最大成像距离。
在我国现有的国军标或行业标准中,ISAR设计指标的考核方法属于空白。本文对成像指标的考核方法进行了系统的研究,提出了外场条件下利用转台模型实现对雷达系统成像能力的验证方法。此外,还分别提出了成像距离、成像距离分辨率和成像方位分辨率的测试步骤,并给出了所研制ISAR的测试结果。
[1]WEHNER D R.High-Resolution Radar[M].2nd ed.Boston,London:Artech House,1994.
[2]刘永坦.雷达成像技术[M].哈尔滨:哈尔滨工业大学出版社,1999.
[3]保铮,邢孟道,王彤.雷达成像技术[M].北京:电子工业出版社,2005.
[4]张今培.调频连续波SAR成像算法及参数估计方法研究[D].南京:南京航空航天大学,2012.
[5]薛明华,马志扬.雷达目标三维成像算法研究[J].雷达科学与技术,2013,11(1):65-70.
XUE Ming-hua,MA Zhi-yang.Research on Three-Dimensional Imaging Algorithm of Radar Target[J].Radar Science and Technology,2013,11(1):65-70.(in Chinese)
猜你喜欢
现代仪器与医疗(2022年1期)2022-04-19
有色设备(2021年4期)2021-03-16
大众科学·下旬(2020年2期)2020-10-21
舰船电子对抗(2020年1期)2020-04-27
科学与信息化(2020年1期)2020-03-25
北京航空航天大学学报(2019年9期)2019-10-26
中国交通信息化(2019年5期)2019-08-30
科技视界(2018年31期)2018-03-30
雷达学报(2017年3期)2018-01-19
北京航空航天大学学报(2017年10期)2017-04-20