相控阵导引头捷联去耦方法及性能分析∗
2015-01-22 10:18
雷达科学与技术 2015年3期
(中国电子科技集团公司第三十八研究所,安徽合肥230088)
0 引言
随着军事科技的日益发展,导弹已经成为现代战场上有效的攻防利器,对其作战性能的要求也越来越高。导引头作为导弹系统中最重要的组成部分,性能优劣直接决定导弹的整体水平。相控阵导引头具有作战反应时间短,能同时跟踪多批次、多目标,以及工作效率高、抗干扰能力强等特点,成为近年来的研究热点。
相比地面、机载和星载环境,导弹飞行过程中受弹体机动及外界气流扰动等影响更为严重,俯仰、翻滚、偏航方向存在剧烈的姿态扰动,并且需要导引头提供高精度的定位信息。相控阵导引头固联在弹体上,弹体姿态会影响波束惯性空间指向,这样导引头测量信号就会耦合弹体姿态运动信息,从而影响制导性能[1]。
根据测量装置安装情况的不同,导引头一般可以分为随动式和捷联式两类,其中捷联式导引头又可分为半捷联和全捷联形式。半捷联导引头采用导弹自身惯导系统提供的姿态信息,但仍然保留惯性稳定框架。相控阵导引头则属于全捷联形式,彻底取消了惯性稳定框架及伺服系统,必须采用数学方法实现波束在惯性空间的稳定。目前国内外对于随动式和半捷联式导引头的去耦研究已经比较成熟[2],而对于全捷联式导引头的去耦研究虽然取得了一定的成果,但技术还不成熟,成为限制相控阵导引头弹载应用的难点[3-6]。涉及军事原因,关于相控阵雷达导引头波束稳定方法国外相关文献[7]报道很少。
本文首先对相控阵导引头捷联去耦特性进行了研究,分析了导致不完全解耦的因素,继而给出了一种实用的相控阵导引头捷联去耦方法,通过该方法对影响解耦性能的因素进行了系统的仿真分析,得出满足工程要求时的约束条件。
1 相控阵导引头捷联去耦特性
弹体隔离性能采用去耦系数(隔离度)来衡量,去耦系数越小表示波束稳定性能越好。一般来说,弹载环境工程需求是当弹体作幅值为2°、频率为5 Hz正弦运动时,去耦系数小于5%@5 Hz±2°。去耦系数计算公式如下:

式中,Δqt为惯性空间中波束指向角度变化的幅值,Δϑ为弹体扰动角度幅值。
相对于机扫模式,相控阵导引头捷联去耦具有如下特性:
1)瞬时性:相控阵导引头通过移相器移相、波束空间合成瞬间改变波束指向,不像机扫模式波束指向改变受电机转动惯性影响,捷联去耦时具有响应惯导姿态变化灵敏、修正波束指向瞬时(μs级)的优点。
2)准确性:相控阵导引头波束指向空间合成,指向精度高;而机扫模式运动机构使用了轴承、齿轮等零部件,轴承侧隙、齿轮回程误差、齿轮传动精度、轴系同轴度等会引入随机误差,降低了修正波束指向的精度。
3)离散性:虽然相控阵导引头捷联去耦具有瞬时和准确的优点,但与机扫模式去耦的连续性不同,相控阵导引头波束指向改变是离散化的,改变频率受波控周期约束。在修正波束指向时刻解耦迅速、准确,但在整个波控周期的其他时间内,导引头不响应弹体扰动进行解耦操作,从而引入了离散化误差。为了提高相控阵导引头的隔离度,必须减小波控周期,提高系统响应弹体扰动的解耦频率。然而波控频率的增加也意味着系统工作负荷的增加,还要考虑工程实现能力。在弹载环境下,为克服弹体扰动而对波控周期提出的严格要求,是有源相控阵天线在地面、星载、机载等其他应用环境中的典型区别之一。
影响相控阵导引头捷联去耦性能的主要因素如图1所示。
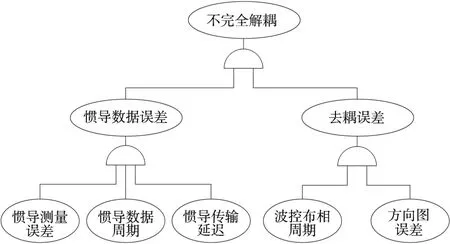
图1 相控阵导引头捷联去耦性能的影响因素
2 相控阵导引头捷联去耦方法
2.1 实用的相控阵导引头捷联去耦方法
数字平台捷联去耦方法的原理是由导引头通过滤波处理给出惯性空间目标视线预测角度,并且利用弹载捷联惯导提供的弹体姿态角信息,通过坐标之间的相互转换建立导引头系统的姿态稳定解算矩阵,并对其实施开环补偿,得到在给定的弹体扰动情况下使导弹目标实现稳定的补偿控制指令,即波束扫描指向偏差的实时修正值,然后把修正后的波束指向反馈给波控计算机,控制导引头波束扫描的方向,从而实现对波束指向的实时修正。
相控阵导引头捷联去耦方法如图2所示。

图2 相控阵导引头捷联去耦方法实现框图
弹体姿态扰动信息(偏航角ψS、俯仰角φS和滚转角γS)由弹上捷联惯导测量,并发送给导引头,导引头接口控制系统将惯导姿态信息加上时标后,转发给波控计算机。波控计算机收到惯导姿态信息后,为消除惯导测量数据更新周期TINS对系统捷联去耦性能的影响,在波控计算机中对惯导数据进行插值计算,并按照时标对传输延迟进行补偿,插值处理方法如下:
在波控计算机中预设两个地址——子地址1和子地址0,分别存储最近两次从导引头任务管理系统收到的不同惯导姿态角数据θ1、θ0,并记录子地址1数据更新的时刻t1。当波控计算机从任务管理系统收到姿态角数据θt时,首先与子地址1中数值θ1比较,如果θt≠θ1,则认为θt为当前时刻惯导姿态角数据,并将子地址0数值更新为θ1,子地址1数值更新为θt;反之如果θt=θ1,则认为当前时刻惯导数据尚未更新,则采用式(2)进行线性插值补偿:

式中,t为当前时刻,T0为预知的惯导数据更新周期。
捷联去耦机制中,预测的目标视线角(目标方位角θa和目标俯仰角θh)由信号处理系统通过滤波处理给出,目标视线角由接口控制系统转发给波控计算机。波控计算机利用插值补偿后的惯导姿态信息,通过坐标变换实施开环补偿,快速解算当前弹体扰动情况下使惯性空间波束指向实现稳定的天线波束修正角度,得到修正后的天线波束扫描方位角θy和俯仰角θz,然后在波控单元中经过查找波位——波控码表获得波控码,以及所有波控码的同步修正值,最后通过移相器实现天线波束的实时修正,去除弹体姿态扰动对目标视线指向的影响。
2.2 相控阵导引头捷联去耦性能分析方法
仿真分析方法结合跟踪回路实际工作情况及捷联去耦方法给出,具体如下:
1)首先设定一组频率5 Hz、幅值2°的正弦数据模拟真实的弹体扰动姿态值,对该姿态值按惯导更新周期离散化并施加传输延迟,模拟导引头实际收到的惯导测量数据;
2)设定当前期望目标方位角θa和目标俯仰角θh;
3)模拟波控计算机对惯导测量值进行插值处理;
4)按照波控布相周期,采用当前时刻目标视线角度及当前时刻插值后的惯导测量值进行去耦补偿,坐标变换后得到修正后的波束方位角θy和波束俯仰角θz(实际工作中据此通过查波位——波控码进行布相);
5)根据修正后的波束角度及当前时刻真实的弹体扰动姿态值解算得到实际的惯性空间目标视线角度(目标方位角θ′a和目标俯仰角θ′h),与期望目标视线角度进行比较,得到由于不完全解耦造成的波束惯性空间误差角Δqt,进而根据式(1)计算去耦系数。
3 仿真实验及分析
相控阵导引头捷联去耦所需要的弹体姿态信息由弹上惯导测量数据给出,自身无法消除该测量误差,因此在性能分析时暂不考虑。重点考查惯导数据更新周期TINS、惯导数据传输延迟TD、惯导数据插值周期TC、波控布相周期TB带来的去耦系数影响。天线方向图引入的误差很小,可以忽略。
根据工程经验,对仿真参数有如下假设:
1)惯导数据更新周期TINS:2 ms,5 ms;
2)控制系统中惯导数据传输延迟TD≤3 ms;
3)波控布相周期TB:1~20 ms。
如前所述,相控阵导引头捷联去耦存在离散化误差。故仅在波束控制时刻统计去耦性能并不准确,会造成统计值比实际情况偏好的结果。在去耦系数计算过程中,采用增加统计频率方式可以对离散化误差较为精确统计,在每个波控周期内求取多次波束惯性空间波束指向偏差的均方根,采用该值进行去耦系数计算。
3.1 惯导数据更新周期影响分析
为消除惯导测量数据更新周期TINS对系统的捷联去耦性能存在影响,在捷联去耦过程中对惯导数据进行了插值计算(插值周期TC=0.5 ms)。从图3可以看出,捷联去耦性能随着TINS增加而迅速恶化,而对惯导数据进行插值计算后,受TINS影响显著变小。当TINS<5 ms时,系统的去耦性能趋于稳定。

图3 去耦系数随T INS的变化(T D=1 ms,T B=2 ms,T C=0.5 ms)
TC选择过大,系统捷联去耦性能改善可能不明显;而TC选择过小,则会增加系统运算量,给工程实现带来难度。下面通过仿真分析对插值周期TC的选取给出建议。图4给出了TINS为5 ms时,去耦系数随TC变化的曲线。可见当TC<0.5 ms时,系统捷联去耦性能趋于稳定。
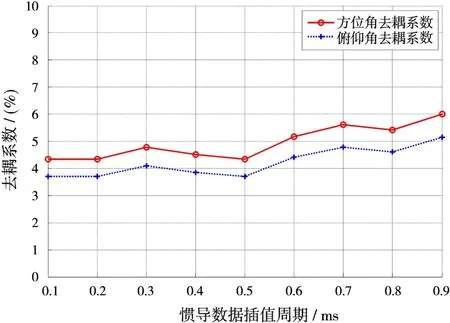
图4 去耦系数随T C的变化(T INS=5 ms,T D=1 ms,T B =2 ms)
3.2 惯导数据传输延迟影响分析
对惯导数据传输延迟TD对捷联去耦性能影响情况进行分析,假定传输延迟从0~3 ms变化,仿真结果如图5所示。可见系统捷联去耦性能随着TD的增大下降明显。当TD>1 ms时,已经不能满足5%去耦系数要求。
3.3 波控布相周期影响分析
波控布相周期影响分析仿真结果如图6(a)所示。由于离散性,捷联去耦性能随着TB的增大迅速下降,仅在TB≤2 ms时方位和俯仰方向去耦系数全部满足5%的要求,TB=2.5 ms时方位角已经临界。在图6(b)中,对惯导数据的传输延迟进行了补偿处理,假定惯导传输延迟可以全部补偿掉时,对波控布相周期的要求可以降低到4 ms。
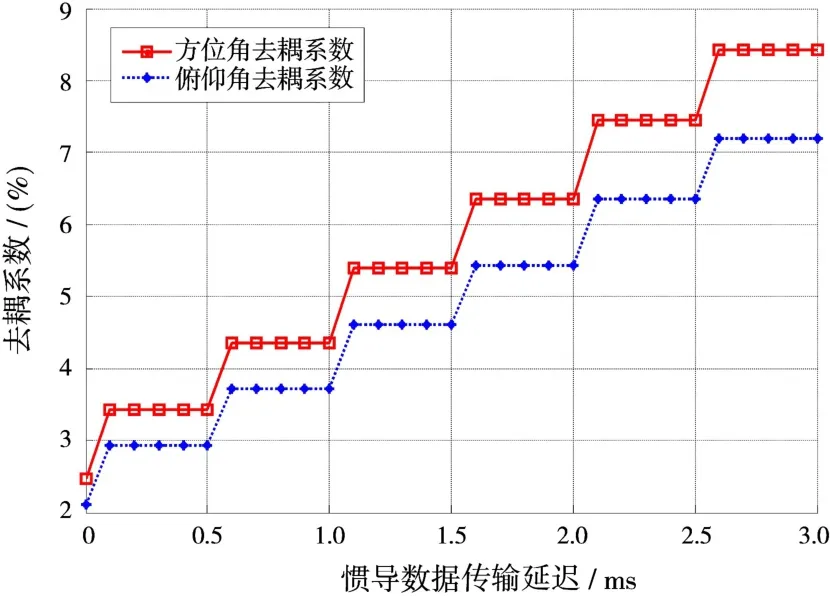
图5 去耦系数随T D的变化(T INS=5 ms,T C=0.5 ms,T B=2 ms)

图6 去耦系数随T B的变化
3.4 满足工程需求条件
变化不同的参数,当惯导数据延迟未进行补偿时,计算结果如表1所示。可以看出,控制传输延迟≤1 ms、波控周期≤2 ms时,去耦系数满足5%的工程要求,其中序号3解耦前后角度误差情况如图7所示。假定延迟影响可以全部消除,计算结果如表2所示。可以看出,如果可以很好地控制惯导传输延迟,当波控周期≤4 ms时,去耦系数即满足5%的要求,其中对应序号1解耦前后角度误差情况如图8所示。
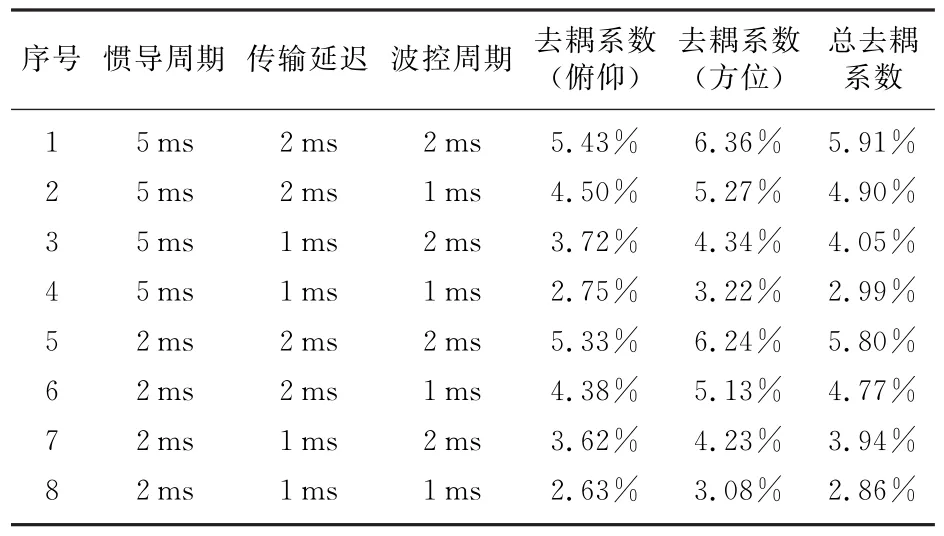
表1 惯导延迟未补偿去耦系数计算
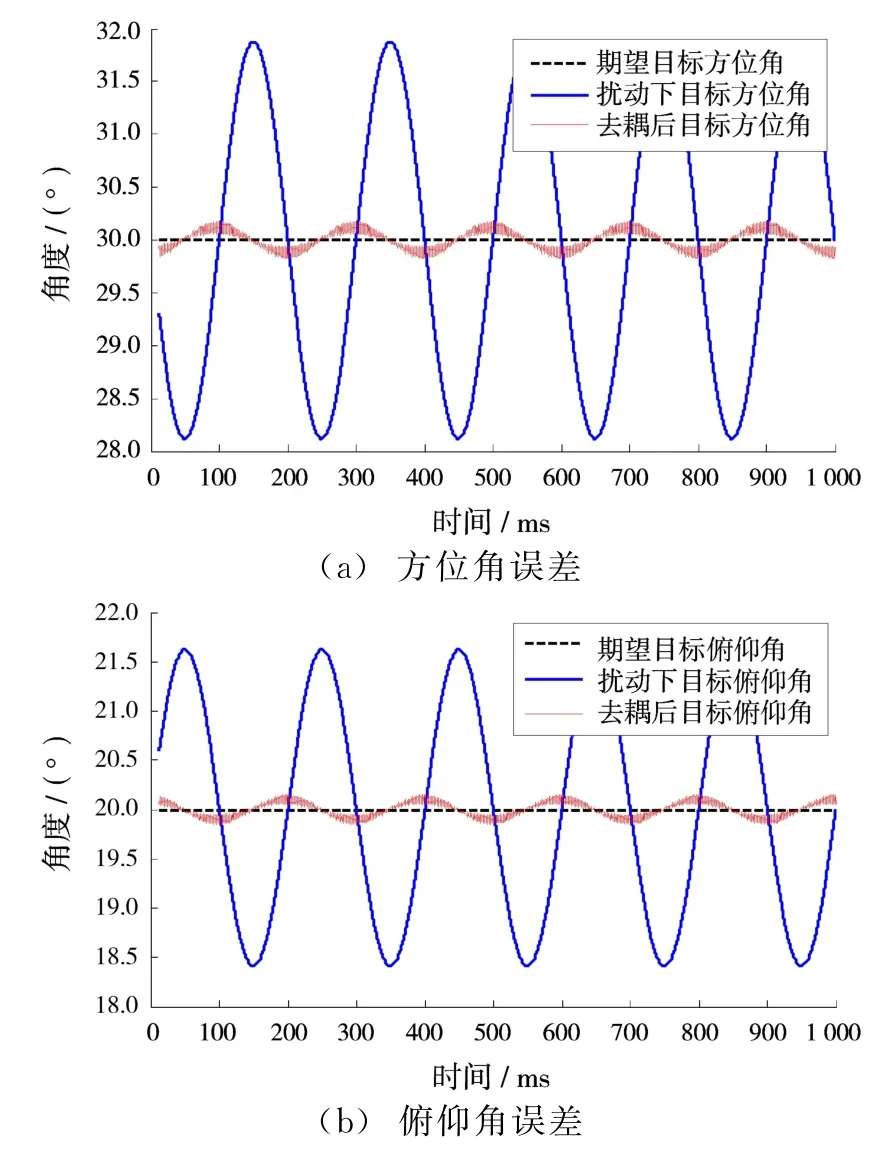
图7 目标视线角度及误差(T INS=5 ms,T D=1 ms,T C=0.5 ms,T B=2 ms)

表2 惯导延迟完全补偿后去耦系数计算
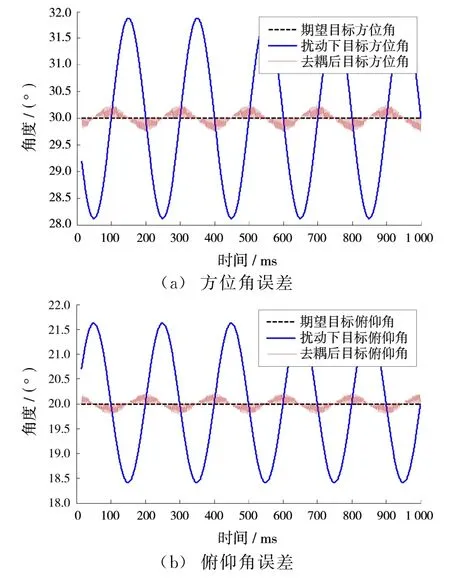
图8 目标视线角度及误差(T INS=5 ms,T C=0.5 ms,T B=4 ms)
4 结束语
本文针对相控阵导引头易受弹体扰动影响波束指向的问题,分析了相控阵导引头捷联去耦的特性,给出了一种实用的捷联去耦方法,并对影响捷联去耦性能的因素进行了较为系统的分析,给出了工程化设计时的建议。通过理论分析和工程经验可知,弹载相控阵导引头的捷联去耦是可实现的,下一步将通过研制原理样机,对影响分析的正确性进行验证,并进一步完善捷联去耦方案。
[1]樊会涛,杨军,朱学平.相控阵雷达导引头波束稳定技术研究[J].航空学报,2013,34(2):387-392.
[2]周新良,吴鹏.一种快速扫描伺服系统的设计与实现[J].雷达科学与技术,2013,11(5):551-556.ZHOU Xin-liang,WU Peng.Design and Realization of Fast Scanning Servo System[J].Radar Science and Technology,2013,11(5):551-556.(in Chinese)
[3]朱振虹,夏群利,蔡春涛,等.相控阵导引头去耦及视线角速率提取算法研究[J].战术导弹技术,2013,9(5):70-75.
[4]王琪,付书堂.捷联导引头去耦算法研究[J].航空兵器,2012(6):7-9,19.
[5]孙彪.相控阵雷达导引头捷联去耦数字平台设计[J].电子设计工程,2012,20(13):79-82,85.
[6]王琪,付书堂.相控阵雷达导引头捷联波束稳定算法研究[J].航空兵器,2011(6):3-5.
[7]RUDIN R T.Strapdown Stabilization for Imaging Seekers[C]∥2nd Annual AIAA SDIO Interceptor Technology Conference,Albuquerque,NM:US Naval Air Warfare Center,1993:1-10.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
数字海洋与水下攻防(2020年5期)2021-01-04
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06
弹箭与制导学报(2015年1期)2015-03-11
弹箭与制导学报(2015年1期)2015-03-11
计算技术与自动化(2014年1期)2014-12-12