基于压缩感知的快速运动目标测速方法∗
2015-01-22 10:19胡瑞贤
雷达科学与技术 2015年3期
胡瑞贤,潘 勉
(1.中国电子科技集团公司电子科学研究院,北京100041;2.杭州电子科技大学电子信息学院,浙江杭州310018)
0 引言
合成孔径雷达(Synthetic Aperture Radar,SAR)具有全天候、全天时、高分辨的特点,是一种重要的遥感观测手段[1-2]。基于SAR平台的地面运动目标指示(Ground Moving Target Indication,GMTI)系统[3-6]具有较强的慢速运动目标检测和参数估计能力。但这种体制在检测地面快速运动目标时存在两个难点:其一,由于运动目标速度较快,会产生距离徙动,方位压缩时出现严重散焦,导致信噪比降低,影响目标检测能力;其二,SARGMTI系统的脉冲重复频率(PRF)限定了可观测到的最高多普勒频率,当目标速度较大时,其多普勒频谱会发生折叠,径向速度的估计结果存在模糊问题,给运动目标测速和定位造成困难。快速运动目标的径向速度由两部分组成。系统的盲速值vblind限定了可观测到的最大径向速度,只有-0.5vblind~0.5vblind的速度能观测到,此处称为基带径向速度。不能观测到的盲速以外的速度被量化为盲速的整数倍,称为速度模糊数。例如,某个机载SAR-GMTI系统的盲速为7.2 m/s。对于该系统,一个径向速度为10 m/s的运动目标的速度模糊数为1,基带径向速度为2.8 m/s。速度模糊数和基带径向速度的估计方法是不同的。速度模糊数的估计方法包括斜距历程方法[7]、距离频率域多视方法[8]、解斜Keystone方法[9]。基带径向速度的估计方法包括沿航向干涉仪方法[10](Along Track Interferometry,ATI)、最大似然方法[11](Maximum Likelihood,ML)、速度SAR方法[12](Velocity SAR,VSAR)和IAA-VE方法[13]等。
最近信息论领域提出了一种压缩感知[14](Compressed Sensing,CS)理论。根据CS理论,只要信号是可压缩的或在某个变换域是稀疏的,即可用一个与变换基不相关的观测矩阵将变换所得高维信号投影到一个低维空间上,然后通过求解一个优化问题从非常有限个投影中以高概率重构出原信号。CS已在雷达信号处理等领域[15-16]取得了广泛应用。为解决快速运动目标径向速度的估计问题,提出一种基于CS的运动目标径向速度估计(Radial Velocity Estimation,RVE)算法(CS-RVE)。首先构建一个径向速度的阵列流形矩阵,然后将径向速度估计问题转化为求一个超定方程解的问题。由于目标径向速度具有唯一性,该方程的解具有稀疏性。这种稀疏性确保了对目标信号高概率的准确重建,通过求解一个超定方程的稀疏解,即可实现对目标信号幅度和径向速度的精确估计。需要指出,CS算法估计得到的结果虽然精度很高,但是存在模糊,而在压缩距离慢时间域利用目标斜距历程可以估计得到低精度的不模糊径向速度,二者联合处理即可获得不模糊的、高精度的径向速度。
1 运动目标信号模型
图1为一个条带正侧式多通道SAR-GMTI系统。该雷达系统工作时采用全孔径发射,多个子孔径(通道)同时接收发射信号的回波进行处理。设雷达平台以速度V沿X轴方向匀速直线飞行,斜距平面内与X轴垂直的方向定义为Y轴。图中M个天线沿航向等间距排列,且相邻天线的等效相位中心间距为d。令tm表示慢时间,且tm=0时刻天线1的等效相位中心位于(0,0)点,则从左到右这M个天线的等效相位中心的坐标分别记为(Vtm,0),(Vtm-d,0),…,(Vtm-(M-1)d,0)。假定场景中存在着一个沿Y轴匀速运动的目标,其初始位置为(0,y0),径向速度为vr,目标相对于雷达第i个天线的瞬时斜距历程为

式中,di=(i-1)d,i=1,2,…,M。对于第i个天线,当tm=tbi(tbi=di/V)时刻运动目标处于雷达波束的方位向中心(正侧视),在tbi时刻用泰勒公式对Rmovi(tm)进行展开,忽略(tm-tbi)3次以上的高次项,可以得到

式中,Rbi=(y0-vrdi/V)。式(2)中,运动目标斜距历程主要由三部分组成:常数项Rbi,运动目标与第i个天线处于正侧视时的斜距;一次项系数vr,运动目标在SAR图像上的距离走动率;二次项系数V2(tm-tbi)2/2Rbi,距离弯曲项,导致斜距随方位时间非线性变化。由SAR成像原理可知,距离压缩后目标的距离单元位置可等效为其斜距。
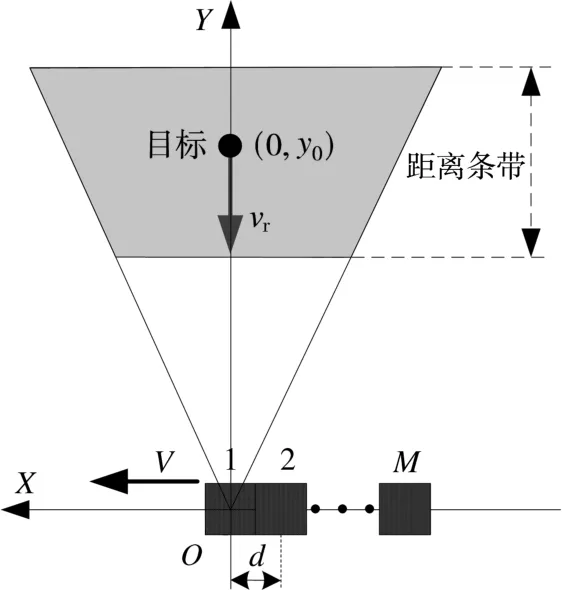
图1 沿航向SAR-GMTI系统的观测几何关系
由式(2)可知,在压缩距离慢时间域目标的斜距历程的一次项系数就等于运动目标的径向速度,理论上讲可以采用时频分析或者最小二乘拟合等方法估计目标的径向速度。
下面研究运动目标在SAR图像上的距离走动率即一次项系数所呈现斜率的测量方法。Radon变换是测量一条直线斜率的有效方法[17]。一幅图像g(x,y)的Radon变换方程定义如下:

式中,δ(·)为Dirac函数,ρ为原点到直线的垂线的长度,θ为x轴和垂线间的夹角。则由式(3)可知,(x,y)域内的一条直线ρ0=x cosθ0+y sinθ0经过Radon变换后将被聚焦为(ρ,θ)域内的一个点(ρ0,θ0)。则由式(2)和式(3)可知,目标的径向速度为

式中,正切函数tanθ0为无界、周期、奇函数。以(-90°,90°)一个周期为例,其函数值随角度变化满足如下规律,正切函数值在[-80°,80°]内变化较缓慢,在(-90°,-80°]和[80°,90°)范围内正切函数值随角度剧烈变化。因此,利用Radon变换通过目标斜距历程可以准确估计速度模糊数,但是估计基带径向速度的精度较差,因此有必要寻找高精度的目标径向速度估计方法。
2 基于压缩感知的快速运动目标径向速度估计方法
2.1 基于CS-RVE方法的运动目标径向速度估计方法
理想情况下,相邻天线i与天线i+1接收的运动目标信号存在如下关系:

式中,下标“mov”表示运动目标,t为快时间,Imov_i(t,tm)的下标i表示第i个天线的运动目标信号,雷达波长为λ,雷达平台速度为V。
将式(5)的结果从两天线推广到多天线,则M个天线接收到的运动目标信号可以表示为

式中,[·]T为转置,Imov,1(t,tm)为图像1的运动目标信号。为便于后面分析,令

式中,a(vr)表示径向速度为vr的运动目标对应于M个天线的导向矢量。需要指出,运动目标的径向速度具有唯一性,其实际值由目标运动模型决定。目标的这种特性可以理解为在某个速度区间上的稀疏分布。传统的ATI方法是通过不同天线回波间的干涉相位来估计目标径向速度。这种方法属于开环算法,其鲁棒性往往较差,一旦噪声或剩余杂波功率较强或者系统参数存在误差,干涉测速性能明显下降,其测速结果与真实值的误差较大;另外,即使存在多个天线自由度,干涉测速仅利用两个天线自由度,无疑会造成空间自由度的浪费。事实上,多个传感器的总体判决结果性能总是优于其中任意单个传感器的判决结果[18],因此有必要寻找一种性能优良且充分利用系统天线自由度的测速算法。
解决办法是预先设定一个速度区间,然后从选定的区间中搜索或估计得到目标的径向速度值。为此可以将式(7)中的径向速度vr转化为一个1×K的行向量vr(实际情况中K的取值尽可能地覆盖感兴趣的观测区域内各种不同径向速度的目标):

式中,K表示离散的目标径向速度个数。为便于处理,令式(8)中vr,1到vr,K按照从小到大排列,即vr,1<vr,2<…<vr,K,则向量vr实际上表示的是一个离散的速度区间。K的取值越大,速度区间的搜索间隔越小,测速精度越高。因此,K的取值通常远大于真实目标的个数,即目标分布是稀疏的。理论上讲,K的取值越大,对计算机硬件的要求越高,因此在实际处理时需要在测速精度与运算量之间进行折中。
式(7)×式(8),可以得到

矩阵A是一个M×K的矩阵,为便于后面分析讨论,此处将其称为目标径向速度的阵列流形矩阵。
根据式(9),式(6)可以转化为

式中,s为引入的一个K×1的列向量。注意考虑到实际中不可避免地存在干扰因素,式(10)中额外增加了一个M×1的向量n,表示系统中噪声或者杂波剩余等干扰分量。
需要指出,列向量s是稀疏的,即s中大部分元素是零。从而求解s的问题可以转化为如下的凸优化问题:

式中,‖·‖1和‖·‖2分别表示1-范数和2-范数,ξ为误差功率。式(11)中,1-范数表示求出的解向量s尽可能稀疏,而其中的2-范数不等式约束表示噪声功率约束在ξ以内,使得信号得以精确重构。
事实上,由于运动目标的径向速度取值具有唯一性,式(11)的解向量s只有一个非零元素,其他元素全部为零或接近于零。于是式(11)可以转化为
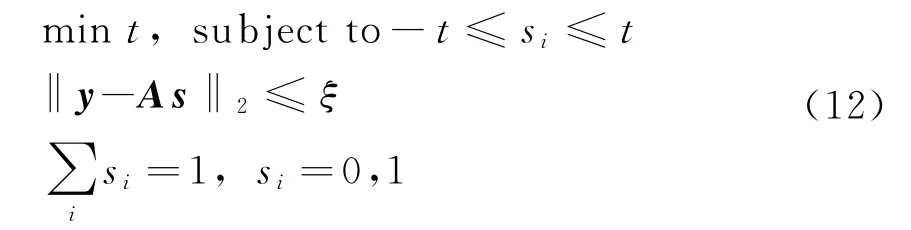
式(12)的优化问题较常见,可用线性规划等凸优化方法进行求解。
2.2 应用CS-RVE方法处理时需要解决的问题
1)向量y的构造方法
对这M幅SAR图像进行方位配准后,在多幅图像中相同像素间对应的相位差值均满足式(1)的关系。一般而言,快速运动目标在进行方位压缩时会出现严重散焦,信杂噪比会明显降低。为了提高相位估计的准确度,需要提高系统的信杂噪比。
首先必须要进行杂波对消,由式(5)
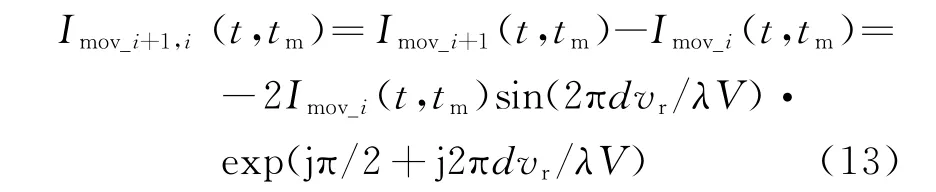
式中,Imov_i+1,i(t,tm)表示第(i+1)和第i个天线运动目标信号的对消结果。注意,当vr=0时,Imov_i+1,i(t,tm)=0,即静止杂波被完全抑制,而运动目标本身vr≠0,由于干涉相位的影响,不会被消除。另外,式(13)表明,杂波对消后,目标干涉相位为原来一半,从而杂波对消后式(7)修正为
更为值得关注的是,如果说形式创新是一种必然,那么对于盐湖股份公司这样的大牌国企、老牌国企来说,思维方式的创新则是一种颠覆性变革——“7621”模式在混合所有制形式创新方面,更打造了一个农资新样板。他们采取国企民营企业联合、所有制形式融合的方式,创新机制,联合并带动了一批口碑好、品牌强、具有实力的农资龙头企业,共同组建市场经营新主体。

式中,a′(vr)为(M-1)×1的列向量,主要是因为杂波两两对消需要消耗系统的一个空域自由度。
目标峰值处的信号功率最强,其对应的信杂噪比最高,可以取目标峰值构造向量y:

式中,max(·)表示取最大值,|·|表示绝对值。
2)盲速对稀疏解s的影响
系统的盲速可以定义为

式(16)表明,盲速与λ和V成正比,与d成反比。由于常见的载机平台速度通常为几百米每秒,系统的盲速值通常很小。
盲速造成的最直接的影响是,在构造径向速度的阵列流形矩阵A时,其第i列的向量a(vr,i)可能和第k列的向量a(vr,k)相等,即

式中,vr,j=vr,i+kvblind,k∈Z(Z表示整数)。式(17)表明,如果搜索区间跨越一个或多个盲速区间,则由矩阵A和向量y求得的稀疏解s可能与真实值相差盲速vblind的整数倍。
2.3 联合斜距历程和CS方法估计快速运动目标径向速度
斜距历程虽然测速精度不高,但测速结果不存在模糊。将斜距历程模型与CS方法相结合可以准确估计目标的径向速度。首先利用斜距历程粗略估计得到不模糊径向速度;然后利用CS方法获得一系列高精度的径向速度,m∈Z;最后采用如下关系得到准确的目标径向速度:

3 仿真数据处理结果
为验证算法的性能,仿真一组机载X波段六通道SAR-GMTI数据。天线方位向孔径长为6 m,沿方位向均匀分成6个相同的子孔径,天线等效相位中心间距为0.5 m。雷达工作在正侧视模式下,6个天线子孔径依次沿航向排列,雷达工作时,采用全孔径发射,6个子孔径同时接收回波。波长为0.03 m,发射带宽为50 MHz,采样率为60 MHz,脉冲重复频率为300 Hz,载机速度为150 m/s左右。
3.1 单个快速运动目标的测速结果
图2(a)为德国DLR实验室机载实测数据得到的一幅SAR图像。为了更加接近实际的地面回波信号,取图2(a)的图像灰度值作为静止场景散射率的幅度,仿真了6幅机载SAR图像,并在场景中注入了一个径向速度为11 m/s的运动目标以验证算法的性能。
图2(b)~(f)为仿真数据的处理结果。图2(b)为采用传统距离多普勒算法处理得到的原始SAR图像。由于6个孔径的杂波场景非常相近,此处仅给出一个通道的成像结果。需要指出,静止场景会对目标测速结果造成不利影响,为了提高目标的测速精度,需要首先进行杂波抑制以提高系统的输出信杂噪比,杂波抑制后再进行目标测速。为了利用目标斜距历程进行测速,杂波抑制在距离压缩后进行。图2(c)给出了图像1和图像2杂波抑制后目标的斜距历程。可以看出,整个静止场景的杂波功率明显降低,个别强杂波点还存在一定杂波剩余,但是对后续的检测和测速影响已经明显减小。而图中的目标信号并没有明显降低,系统的信杂噪比显著提高。
为了测得精确的目标径向速度,首先需要通过目标斜距历程对径向速度进行粗略估计。事实上,当获取了目标的距离压缩数据后,可以提取出目标的斜距历程坐标,然后利用Radon变换测出运动目标在SAR图像上的距离走动率,进而估计得到运动目标的径向速度。图2(d)为利用Radon变换测量目标斜距的斜率,可以粗略测得运动目标的径向速度约为12.70 m/s,与真实结果的误差为1.70 m/s。可以看出,由斜距测得的目标径向速度达不到测速的精度要求。但是由于斜距历程不存在模糊,可测得径向速度模糊数为1。
图2(e)为杂波抑制后的运动目标成像结果。图中由于径向速度较高,目标存在严重散焦,但杂波抑制后剩余杂波对测速的影响较小,仍然可以获得精确的测速结果。
图2(f)表示的是采用CS-RVE方法搜索目标径向速度。图中横坐标为径向速度搜索区间,其范围是[-20 m/s,20 m/s],纵坐标为目标信号幅度。可以看出,当径向速度为2.01±9k(k∈Z)m/s时,目标峰值为87.96 dB。图中搜索得到的目标信号峰值呈周期性排列,表明CS-RVE方法搜索得到的目标径向速度存在模糊。前面的图2(d)中已经测得的径向速度模糊1次,从而可以由式(18)确定运动目标的准确径向速度为11.01 m/s。换言之,CS-RVE算法与斜距历程相结合估计得到的目标径向速度与真实值误差仅有0.01 m/s。为了对算法进行比较,最后采用干涉测速与斜距历程相结合的方法测量目标的径向速度,得到的测速结果为16.58 m/s,与实际结果相差5.58 m/s。进一步说明,存在杂波剩余的情况下,ATI方法的性能会明显降低,表明了算法的优越性。
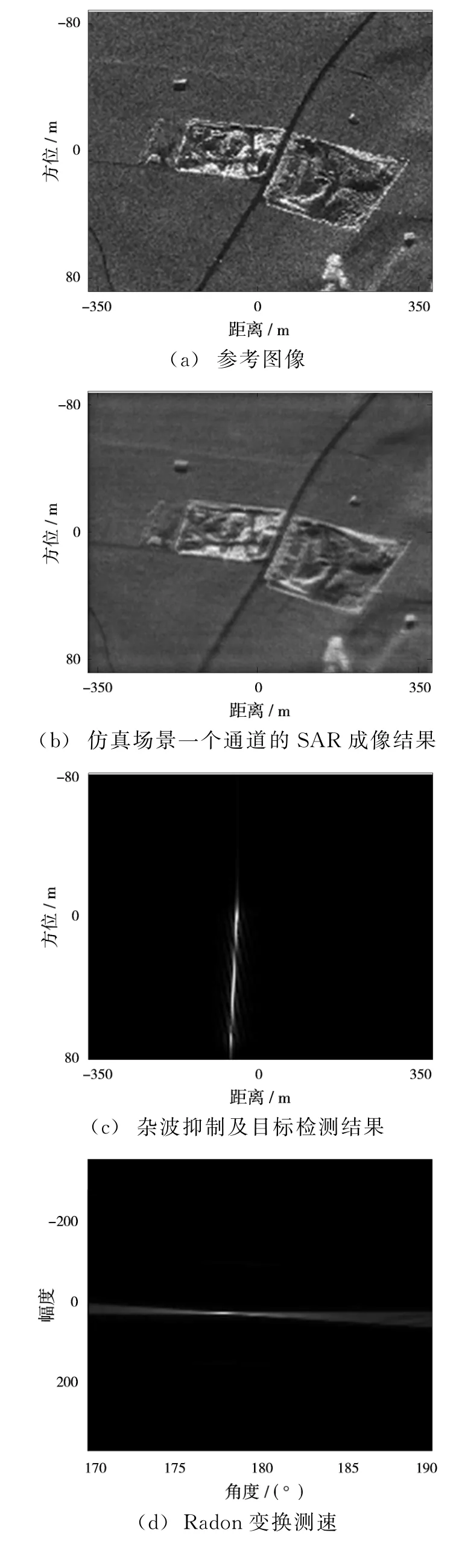

图2 运动目标成像和径向速度估计方法
3.2 多个快速运动目标的测速结果
仍采用上面参数仿真3个运动目标P1,P2和P3,其径向速度分别为11.00,10.00和9.00 m/s,三者的信噪比分别为15,18和20 dB。图3为P1,P2和P3三个运动目标的SAR成像结果。由于目标径向速度引起的距离走动,3个目标成像后均存在明显的散焦。

图3 3个快速运动目标的SAR成像结果
为分析算法对存在多个运动目标时的测速性能,分别用CE-RVE算法和ATI方法进行测速,测速结果如表1所示。由表1可知,CS-RVE算法的测速性能优于ATI算法,主要是由于ATI算法只利用了两个天线自由度,而CS-RVE算法充分利用了全部的天线自由度。另外,由表1可知,目标的测速精度与其信噪比成正比。与图2中单个快速运动目标的测速结果相比,场景中存在多个快速运动目标时,CE-RVE的测速性能会一定程度地下降,原因可能是多个快速目标之间存在相互干扰,具体影响机理需要后续深入分析。

表1 不同方法的测速结果
4 结束语
针对多通道SAR-GMTI系统的快速运动目标检测问题,将不模糊的斜距历程测速方法和高精度的CS测速方法相结合,提出一种CS-RVE方法估计快速运动目标的径向速度。这种方法测速精度高且实现简单,运算量适中。仿真数据处理结果表明,在干涉相位发生模糊时,该方法仍然可以准确估计运动目标径向速度,其测速精度显著优于传统的干涉测速方法。
需要指出,CS-RVE算法的测速精度会受到目标输出信杂噪比的影响,杂波抑制性能较差或目标信噪比较低时,系统参数估计性能会受到一定的影响。特别当相同的距离单元或相同的多普勒单元内存在两个以上快速运动目标时,目前的大多数测速算法(包括CS-RVE算法)的测速性能都会明显下降,需要未来深入研究。
[1]邬伯才,施晋生,孙龙,等.宽带DBF SAR/MTI雷达典型工作模式设计[J].雷达科学与技术,2014,12(1):20-28.WU Bo-cai,SHI Jin-sheng,SUN Long,et al.Typical Design of Operating Mode for Wideband Digital Array SAR/MTI Radar[J].Radar Science and Technology,2014,12(1):20-28.(in Chinese)
[2]孙宏岩.基于边缘特征的SAR图像目标检测方法[J].雷达科学与技术,2013,11(5):462-468.SUN Hong-yan.Target Detection Algorithm for SAR Image Using Edge Feature[J].Radar Science and Technology,2013,11(5):462-468.(in Chinese)
[3]MAKHOUL E,BROQUETAS A,RUIZ RODON J,et al.A Performance Evaluation of SAR-GMTI Missions for Maritime Applications[J].IEEE Trans on Geoscience and Remote Sensing,2015,53(5):2496-2509.
[4]HU R X,LIU B C,WANG T,et al.A Knowledge-Based Target Relocation Method for Wide-Area GMTI Mode[J].IEEE Geoscience and Remote Sensing Letters,2014,11(4):748-752.
[5]GIERULL C H,SIKANETA I,CERUTTI-MAORI D.Two-Step Detector for RADARSAT-2’s Experimental GMTI Mode[J].IEEE Trans on Geoscience and Remote Sensing,2013,51(1):436-454.
[6]LI Y K,WANG T,LIU B C,et al.High-Resolution SAR Imaging of Ground Moving Targets Based on the Equivalent Range Equation[J].IEEE Geoscience and Remote Sensing Letters,2015,12(2):324-328.
[7]杨垒,王彤,保铮.地面运动目标不模糊径向速度估计的方法[J].西安交通大学学报,2009,43(8):76-79.
[8]ZHU S Q,LIAO G S,QU Y,et al.A New Slant-Range Velocity Ambiguity Resolving Approach of Fast Moving Targets for SAR System[J].IEEE Trans on Geoscience and Remote Sensing,2010,48(1):432-451.
[9]SUN G C,XING M D,XIA X G,et al.Robust Ground Moving-Target Imaging Using Deramp-Keystone Processing[J].IEEE Trans on Geoscience and Remote Sensing,2013,51(2):966-982.
[10]SOUMEKH M.Moving Target Detection and Imaging Using an X Band Along-Track Monopulse SAR[J].IEEE Trans on Aerospace and Electronic Systems,2002,38(1):315-333.
[11]DRAGOŠEVI'C M V,BURWASH W,CHIU S.Detection and Estimation with RADARSAT-2 Moving-Object Detection Experiment Modes[J].IEEE Trans on Geoscience and Remote Sensing,2012,50(9):3527-3543.
[12]FRIEDLANDER B,PORAT B.VSAR:A High Resolution Radar System for Ocean Imaging[J].IEEE Trans on Aerospace and Electronic Systems,1998,34(3):755-776.
[13]胡瑞贤,张博,石健,等.基于IAA的多通道SAR系统目标测速新方法[J].电波科学学报,2014,29(3):462-470.
[14]DONOHO D L.Compressed Sensing[J].IEEE Trans on Information Theory,2006,52(4):1289-1306.
[15]ENDER J H G.On Compressive Sensing Applied to Radar[J].Signal Processing,2010,90(5):1402-1414.
[16]杨广玉,马晓静,杨雪亚.基于时-空稀疏解的方位超分辨算法[J].雷达科学与技术,2014,12(2):171-175.
YANG Guang-yu,MA Xiao-jing,YANG Xue-ya.Azimuth Super-Resolution Algorithm Based on Temporal-Spatial Sparse Solution[J].Radar Science and Technology,2014,12(2):171-175.(in Chinese)
[17]ZHANG X P,LIAO G S,ZHU S Q,et al.Geometry-Information-Aided Efficient Radial Velocity Estimation for Moving-Target Imaging and Location-Based on Radon Transform[J].IEEE Trans on Geoscience and Remote Sensing,2015,53(2):1105-1117.
[18]LING Qiang.How Many Low-Precision Sensors are Enough for Reliable Detection[J].IEEE Trans on Aerospace and Electronic Systems,2011,47(4):3001-3006.
猜你喜欢
党员文摘(2022年14期)2022-08-06
党员文摘(2022年7期)2022-04-28
党员文摘(2022年1期)2022-02-14
党员文摘(2022年3期)2022-02-12
科学与信息化(2021年30期)2021-12-24
雷达与对抗(2020年2期)2020-12-25
火控雷达技术(2020年2期)2020-10-16
雷达与对抗(2020年1期)2020-06-05
农家科技中旬版(2018年7期)2018-09-25
航空兵器(2017年6期)2018-01-24