液压驱动四足机器人运动控制方法研究
2015-01-29 07:19卞新高殷勇华
电子设计工程 2015年23期
冯 丹,卞新高,殷勇华
(河海大学 机电工程学院,江苏 常州 213022)
四足机器人具备承载能力强、稳定性好、对地形有较强适应能力等优点,一直是国内外学者研究的热点。文中试验平台为JQRI00型四足机器人平台,本体重约为2吨,每条腿3个运动关节,均为液压驱动,分别标号为P、Q、L缸,四足共有12个液压缸,即该机器人有12个运动自由度。其中,P缸控制足端的横向移动,Q缸控制腿的升降,L缸控制腿的前后摆动。每个油缸安装有位移传感器及电磁比例换向阀构成闭环位移和速度控制。
对于液压驱动的机器人而言,液压缸动作的平稳性对机器人的运动性能的影响是不可忽略的,液压缸的刚性冲击不仅会造成机身失稳,而且会对液压缸造成损伤,导致寿命缩短[1],这种冲击主要由液压缸运动加速度突变引起的。本文分析了液压缸运动规律对机器人行走能力的影响,提出利用S曲线加减速控制方法来控制油缸的运动。为了使液压驱动四足机器人得到稳定准确快速的响应能力[2],本文采用PI控制算法对液压缸进行位置控制。
1 液压缸运动控制规律分析
在机器人运动过程中,足端轨迹各点的位移、速度、加速度都要具备连续性,在过渡点没有突变现象,以减小液压缸运动过程中所受的冲击力,提高机器人运动的平稳性。因此,我们需要对液压缸进行加减速控制,常见的加减速控制方法[3]有:直线加减速方法、指数加减速方法、三角函数加减速方法、抛物线加减速方法以及S曲线加减速方法。前4种方法在过渡点时会出现加速度突变的情况,导致机器人运动不平稳。S曲线加减速控制方法通过对加加速度的控制来限制加速度的突变,保证加速度的连续性,从而使得速度能平滑过渡,提高了液压缸的运动平稳性,S曲线加减速方法的位移曲线方程为:


本文采用ADAMS仿真软件,对机器人虚拟样机进行运动学、动力学仿真。为验证S曲线作为机器人液压缸加减速控制方法的优越性,将ADAMS软件自带的STEP函数应用于位移控制进行仿真,并对两种控制方法下机器人的运动学、动力学特性进行分析比较,如图1所示。
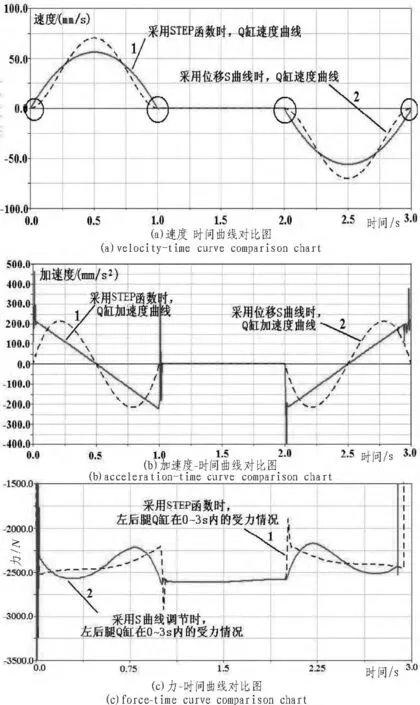
图1 加减速控制方法对比图Fig.1 The comparison charts of deceleration control methods
图中标注的曲线1、2分别为采用STEP函数和S曲线作为液压缸位移控制方法得到的运动学量(速度、加速度)、动力学量(力)的曲线图。
图(a):速度曲线均十分平滑,液压缸在运动过程中较为平稳,但采用STEP函数得到的速度曲线在开始和结束位置出现尖点,在始末位置的过渡不平滑。
图(b):采用S曲线得到的加速度曲线在液压缸从伸长到缩短整个运动过程中过渡平滑;STEP函数得到的加速度曲线在运动过程中出现尖点,过渡不平滑。
图(c):采用S曲线时,整个运动过程中液压缸受力平稳,没有突变现象;采用STEP函数时,运动过程中出现了尖点,使得液压缸受力突变,给液压缸较大的冲击力。
通过上述分析,我们可以知道,利用S曲线控制方法时液压缸的速度、加速度及力的曲线均连续且平滑,提高了机器人运动的平稳性,大大减少了液压缸的柔性冲击。
2 液压缸位置控制系统
针对液压驱动方式,需要为液压缸的位置控制系统选用合适的控制算法,来实现对系统高效、准确的控制,在各种控制算法中,PID控制是应用最为广泛,技术最成熟的控制算法。本文采用PI控制算法,对比例阀进行精确控制,以驱动液压缸迅速而无限接近于目标位移,减小误差,提高控制精度。如图2所示,为PI控制系统原理图及相应的物理模型图。
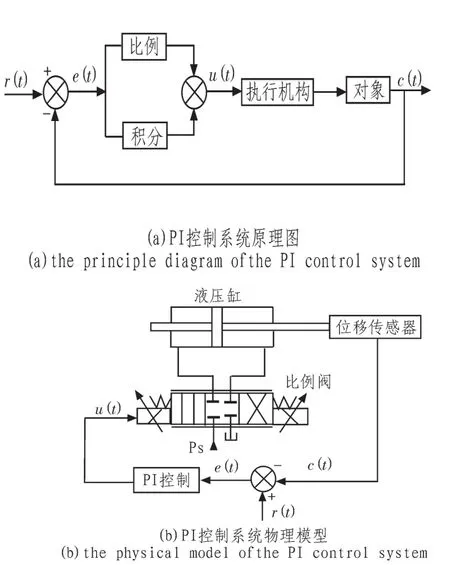
图2 PI控制系统图Fig.2 PI control system diagram
PI控制中,将偏差信号 e(t)的比例(Proportion)和积分(Integral)通过线性组合构成控制器,对被控量进行控制[4]。离散系统的数字PI控制规律:

其中,T为采样周期,TI为积分时间常数,KP为比例系数,积分系数KI=KPT/TI,第k个采样周期的偏差信号e(k)=r(k)-c(k),r(k)为被控对象的设定值,即7次位移曲线规划目标位移值,c(k)为第k个采样周期被控对象的采样值,即位移传感器反馈的当前位移值,u(k)为第k个采样周期被控对象的输出值。
PI控制器优点是算法简单、参数易于调整,本文采用实验凑试法[5-6],先整定 KP(比例系数),将比例控制作用由小到大,观察各次相应的响应,直到得到响应快、超调小响应曲线,然后加入积分控制,整定KI(积分系数)时,先将比例系数KP减小至原来的50%~80%,逐渐增大积分作用,并相应地调节比例系数,反复的调整、试凑以得到较满意的响应和控制效果,从而确定KP、KI。
3 比例阀驱动电路
在液压系统中,电液伺服控制的核心是控制比例阀的电流,本文选用电液阀为4WRA6型电磁比例换向阀,需要设计合适的比例阀驱动电路来控制流经比例阀线圈中的电流。由于传统的比例阀驱动电路结构复杂、占用空间尺寸较大、成本高、可靠性差[7],本文采用改进后的恒流斩波电路作为比例阀驱动电路,如图3所示,虚线框内的电阻和电感表示比例阀线圈。

图3 比例阀驱动电路Fig.3 The proportional valve drive circuit
图中LM393为电压比较器,其同向端接参考电压Vref,反向端与LM358构成的同相放大电路输出端相连,再加上反馈电阻R5就构成了一个滞回比较器。
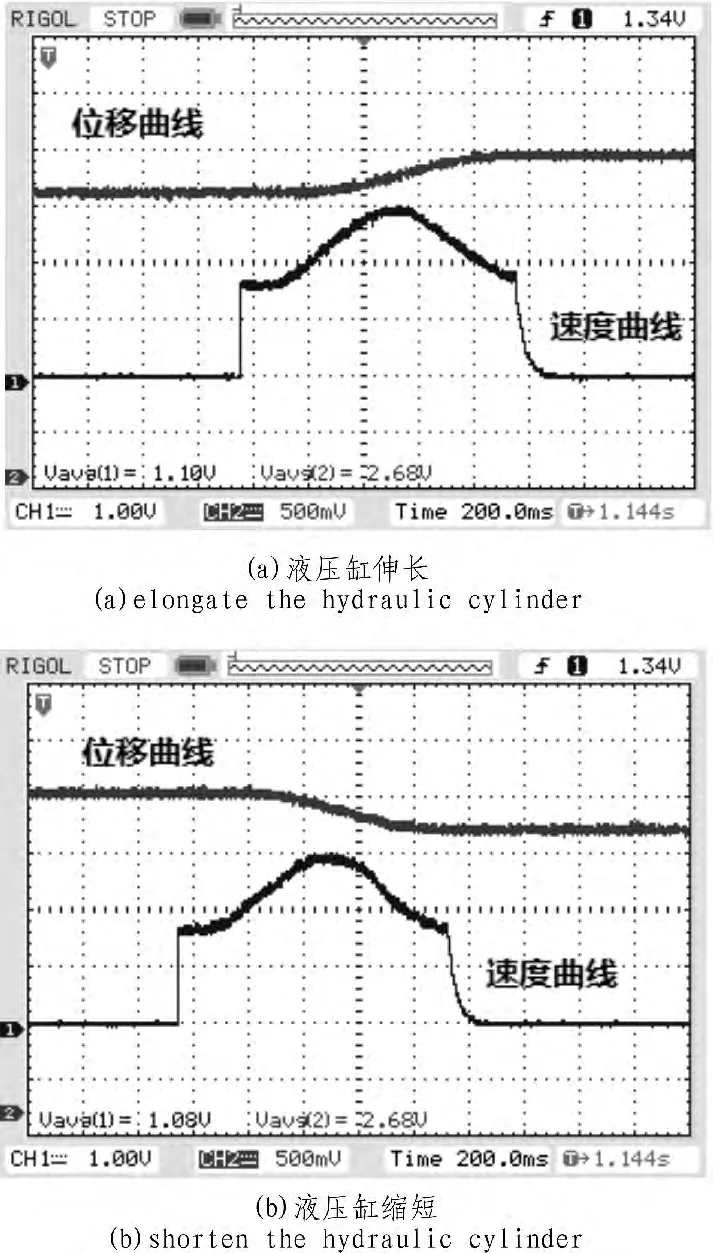
电路工作原理:给定一个参考电压Vref,有V+>V-,滞回比较器输出高电平V0H,三极管Q1饱和导通,P沟道场效应管Q2饱和导通,电磁铁线圈得电,电流逐渐增大,采样电阻R11电压Vin经同相放大电路放大为V01输入到滞回比较器的反向端与参考电压比较;当V01>VT+时,滞回比较器跳变为低电平,Q1,Q2断开,线圈失电,由于线圈为感性负载,线圈中的电流逐渐减小为0;当下降到V01 在硬件电路设计中,一般通过D/A转换来实现程控可变电压的输出,D/A转换可选用专门的DAC芯片实现,也可通过PWM转DA实现[8]。脉宽调制PWM信号,依靠改变其占空比(脉冲宽度)产生不同的控制信号,具有效率高,抗干扰能力强等优点,广泛应用于比例阀、伺服阀等比例电磁线圈的驱动。本文驱动电路控制信号选用PWM转DA实现,针PWM信号的基波频率设计了低通滤波器,将PWM信号的交流部分滤掉,得到低频直流分量作为电路中参考电压Vref,通过改变PWM信号占空比,得到不同的参考电压值,进而控制比例阀中的电流值。 软件与硬件的良好配合,才能构成一个完整的控制器,实现既定的控制功能。在机器人子控制器中进行了比例阀驱动电路的硬件设计,比例阀驱动程序设计(S型曲线、PI控制程序),通过软件与硬件相结合,来驱动比例阀按照要求运动。如图4为比例阀驱动程序流程图。 图4 比例阀驱动程序流程图Fig.4 Proportional valve driver flowchart 在机器人处于运行状态时,根据主控制器所规划的目标位移,调用S型位移曲线进行微步计算,得出当前微步目标位移,将目标位移值与位移传感器反馈的当前位移值差值,作为PI控制比例项,然后累计各次动作与目标位移的偏差作为积分项,根据液压缸不同的运动方向分别带入公式(3)中计算u(k)并上下限幅后刷写PWM模块,进而改变PWM信号的占空比,驱动液压缸伸长或缩短。 将本文设计的电磁阀驱动电路在四足机器人样机上进行试验,并对机器人各个缸动作进行S曲线加减速控制及PI位置控制,得到机器人Q液压缸伸长、缩短时的位移曲线与速度曲线,如图5所示。 图5 液压缸速度、位移曲线Fig.5 The displacement and speed curve of hydraulic cylinder 图5中,位移曲线表示液压缸位移传感器反馈电压的变化;速度曲线表示比例阀驱动电路中采样电阻上电压的变化,由于流经采样电阻的电流与电磁铁线圈中电流相同,电磁比例换向阀是通过控制线圈中电流大小来实现控制液流流量大小(速度大小),因此采样电阻的电压与液压缸速度变化规律一致。由实验曲线可知,本文设计的位置闭环控制系统通过将S型位移曲线的微步规划与PI控制相结合,具有较快的响应速度,运动过程平稳无冲击,达到了预期的效果。 通过在四足机器人样机上进行实验,验证了S曲线位移控制方法和PI位置控制算法的优越性[9],机器人运动过程平稳,响应速度快、动态性能较理想;从实验曲线看出,机器人运动速度变化规律与所设计比例阀驱动电路中线圈电流变化规律一致,满足了液压驱动对机器人控制性能的要求,并为之后机器人的稳定行走奠定了基础。 [1]陆卫丽,卞新,高焦建,等.四足爬行机器人步态分析与运动控制[J].机电工程,2012(8):886-889. [2]王春兰.液压驱动四足机器人的关节控制[D].济南:山东大学,2010. [3]商允舜.CNC数控系统加减速控制方法研究与实现[D].杭州:浙江大学,2006. [4]熊欢欢.大型模锻液压机动梁驱动及位置控制系统研究[D].长沙:中南大学,2010. [5]何芝强.PID控制器参数整定方法及其应用研究[D].杭州:浙江大学硕士学位论文,2005. [6]袁晓东.液压缸位置控制算法探讨 [J].液压气动与密封,2003(5):7-8. [7]冯雨萌.基于电液比例技术的液压挖掘机控制系统研究[D].长沙:中南大学,2010. [9]陈斌,杨文焕,吴帅 ,等.一种新型恒频滞环电流控制策略研究[J].电子科技,2015(10):151-154.4 控制器软件程序设计

5 实验调试
6 结论
猜你喜欢
大电机技术(2022年4期)2022-08-30
冶金设备(2020年2期)2020-12-28
重型机械(2020年2期)2020-07-24
装备制造技术(2020年12期)2020-05-22
纺织科学研究(2020年1期)2020-05-21
模具制造(2019年7期)2019-09-25
制造技术与机床(2017年6期)2018-01-19
现代制造技术与装备(2015年4期)2015-12-23
汽车维护与修理(2015年6期)2015-02-28
电测与仪表(2014年14期)2014-04-04