
PSO电机低损方案模糊预补偿转速转矩优化
2015-02-07 10:04薛鹏陶春鸣黄全振
枣庄学院学报 2015年2期
薛鹏,陶春鸣,黄全振
(河南工程学院电气信息工程学院,河南郑州451191)
PSO电机低损方案模糊预补偿转速转矩优化
薛鹏,陶春鸣,黄全振
(河南工程学院电气信息工程学院,河南郑州451191)
针对矿用驱动电机节能控制中存在的电动机转矩脉动和速度波动问题,提出模糊预补偿调速控制方案.以元器件分类建立异步电机损耗模型并提出基于粒子群算法的变磁通控制方案.提出模糊预补偿给定转速控制以降低系统对参数摄动、干扰和非线性因素的敏感度,修正由于磁通降低带来的电机转速波动问题.利用YVP-100电机参数实验表明,所提方案在额定转矩下,降低了约0.1kw的无功损耗,同时保证了电机转速/转矩的平稳输出.
模糊逻辑;粒子群;损耗优化;异步电机①
0 引言
矿井提升系统以大功率驱动设备作为动力源.在保障系统安全稳定运行的同时,其节能控制问题备受关注.降低驱动电机的无功输出,实现系统能效损耗的优化控制方案是可行方案之一[1,2].同时,为实现节能而造成的电机转速/转矩脉动问题也值得细化研究.
提升机在进入轻载阶段后,电机铁损比其它阶段明显增加,造成了不必要的能耗损失,大大降低了系统的有功输出.在不更换设备的前提下,适当减小气隙磁通,可获得转子铜损和铁损之间的平衡,从而提高电机驱动系统的有功输出[3,4].设计方案包括:损耗模型控制,搜索控制和查表法等[5-7].通过优选控制变量,如输入电压,转差速率,转子磁通等,实现电机损耗的最小化.然而,在实现预期节能目标的同时,驱动电机的动态控制性能也随之下降了.
在降低系统无功损耗的同时,为了提升电机转速及转矩的动态性能,提出给定转速模糊预补偿控制方案.首先,建立三相异步电机综合损耗模型,通过粒子群优化算法调节气隙磁通量,获得系统最优解,从而实现轻载阶段系统无功输出最小化的目的.其次,针对气隙磁通的降低造成的电机转矩脉动和速度波动问题引入模糊预补偿控制,在电机转速PI控制器之前,优化控制给定转速,以提高驱动电机的动态性能.
1 损耗模型和粒子群优化
矿井提升机的电气驱动部分采用三相异步电动机,能耗优化控制系统结构如图1所示.
下面分析推导电机工作过程中的综合损耗模型,给出粒子群优化控制方法,并结合不足提出速度模糊预补偿优化控制方案.

图1 电机损耗的元件分类
1.1 异步电机损耗模型
电机损耗按照元件可分为:定子和转子中的铜损;电机铜芯涡流和铁芯中涡流,磁滞和杂散损耗等造成的磁芯损耗;摩擦损耗;固态开关阻抗造成的变频损耗[3].变频损耗和导线损耗很小,相对于其他项来讲,可以忽略不计.
用Im,IS和I'r分别表示磁化电流,定子电流和转子漏磁电流,Φm表示气隙磁通.各部分电流与气隙磁通之间的关系式分别为:

式中,S1,S2,S3为磁化曲线参数;R'r为转子电阻,X'lr为转子漏磁电抗,C0=1+, Te为电磁转矩.由模型(1)可知,电动机损耗具体包括以下5项:
(1)铜损耗

式中,RS为定子电阻,R'r为转子电阻.
(2)铁损耗

式中,Ke为涡流系数,Kh为磁滞系数.
(3)机械损耗

(4)杂散损耗

式中,Cstr,Cfw为损耗系数.
(5)电机驱动中变频器和逆变器的能耗

式中,K1,K2是开关元件电气特征的表征系数.
由方程(2)-(6),可知系统总损耗为

至此,给出了以气隙磁通为调节变量的电机损耗模型.
1.2 粒子群优化算法
基于损耗模型(7),利用粒子群方法优化气隙磁通,实现电动机的节能控制.气隙磁通量调节过程中,电机转矩Te和转速ω都会受到影响.优化损耗需要

粒子群优化算法通过(8)式寻优求解气隙磁通量,降低驱动电机能量损耗,达到节能控制的目的.
被控量的变化速度和当前值是粒子群算法主要描述变量[4],优化方程为

式中,对应粒子群,用pgd表示最优值的第d维分量;用pid表示第i个粒子的最优位置的第d维分量,群体里共含n个粒子,即有d=1,2,…,D,i=1,2,…,n,;采用表示k次迭代得到的粒子飞行速度矢量的第d维分量;用表示k次迭代粒子i位置矢量的第d维分量.
在(9)式中,粒子群的认知系数由c1,c2表示,而w是惯性权重系数.因为没有记忆,且随机性大,所以能获得较大的搜索范围,具有有很好的全局优化能力.
需要指出的是,以气隙磁通为变量,利用(8)式优化电机能耗的同时,会影响到电机输出转矩和转速两个量,造成输出转矩脉动和转速波动现象[4].因而,需要进一步改进优化方案.
2 模糊调速预补偿控制
通常采用PI控制方法完成电动机转速控制.采集实际转速值与给定值比较得到偏差控制输入量.在第n个瞬时采样时刻,速度偏差为

式中,¯ωr(n)是给定电机转速,ωr(n)是电机实际转速.

图2 模糊预补偿PI控制器
通过多次反复试验可以推算速度控制器的增益参数.然而,PI控制参数的整定值具有局部优化的特点,无法从根本上解决动态特性与稳态精度之间的矛盾.这样的控制器对参数摄动,负载干扰和明显非线性现象带来的不良影响都非常敏感[8].直接造成输出转矩的脉动和输出速度的波动问题.为了克服这个不足,确保系统具有良好的静、动态特性,提出基于模糊逻辑的预补偿PI控制方案.如图2所示,控制器输入¯ωr1由两部分叠加而成:其一,系统原始速度给定¯ωr;其二,预补偿控制量δ,由转子速度ωr和原始给定¯ωr经由模糊逻辑方法得到.这样,速度响应的过度超调现象将被削弱甚至消除.同时,输出转矩的脉动现象也会减弱.因此,控制方法特别适用于转矩和速度经常变化的矿井提升机.
模糊预补偿功能块的数学表达为:

式中,F{}·是模糊逻辑映射函数.由表1的模糊逻辑规则给出目标转速.
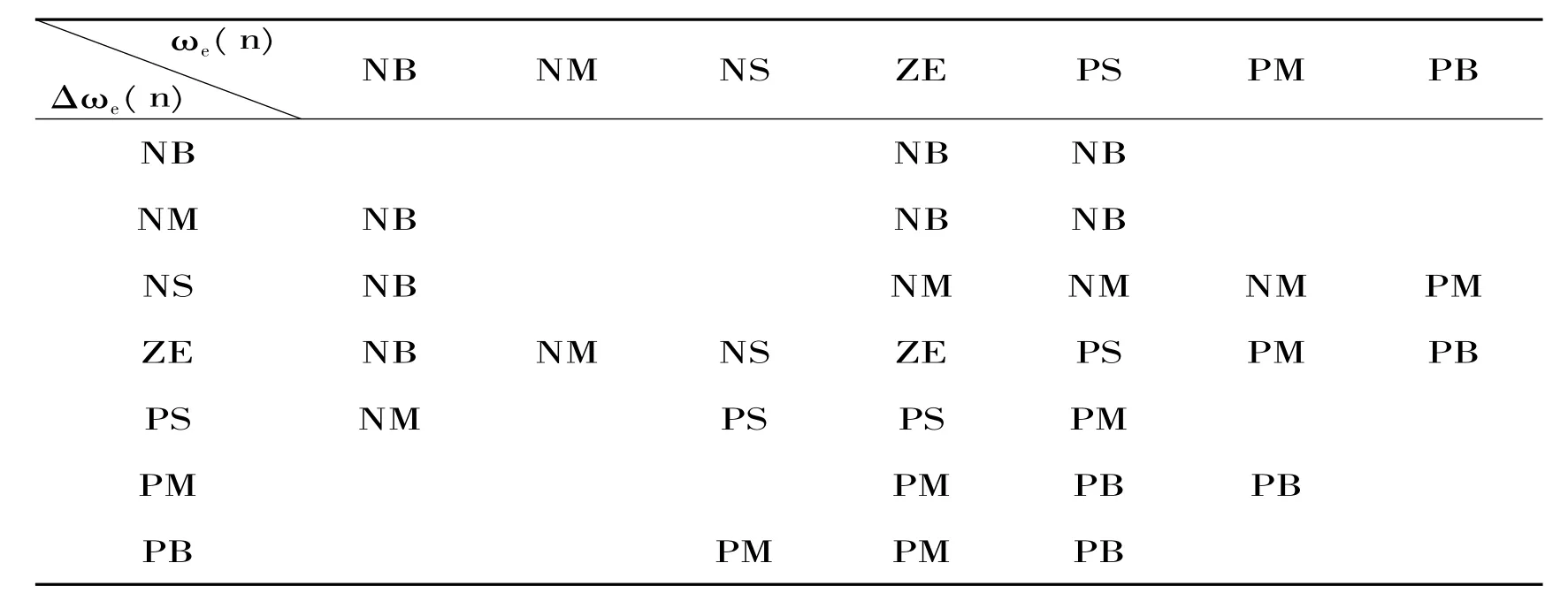
表1 预补偿模块的模糊逻辑规则

图3 不同转矩时的节能效果分析
3 试验验证
采用实验室YVP-100型三相异步电机参数进行仿真实验.电机额定功率为0.75Kw,额定电压380V,额定转矩19Nm,额定转速1400r/min.实验目的在于验证所提方案的在节能方面的可行性,同时验证模糊预补偿调速的改进效果.
(1)调节磁通,实现节能控制
针对构建的电机能耗模型(8),采用粒子群方法优化气隙磁通,在电机不同转速阶段实现最小损耗节能控制.预先设定粒子群优化算法中的惯性权重w为0.8,随着程序的迭代逐步递减至0.3,粒子群体的认知系数c1设为1.7,c2设为1.2,粒子最大速度设为0.5,利用(9)和(10)式进行系统寻优.
实验1:电机输出转矩不同,方案的节能效果也不同.如图3所示,设定电机输出转矩分别为3,7,12,16,19,驱动系统节能比例从80%逐渐降低到31%.也即,电机输出转矩越大,节能比例就越小.
实验2:电机输出转矩不变,输出转速由1400转/分降低到600转/分.结果显示,可降低约100W的电机损耗,即节能约为0.1度每小时.由于试验用电机功率为750W,若将方案应用于2000KW-7000KW的矿井提升机,节能效果将非常明显.
(2)调速补偿,优化输出品质
实验2中,在恒定输出转矩条件下,调节气隙磁通将电机输出转速降低.传统控制方案在这种情况下会导致电机转速波动和输出转矩的波动.采用基于粒子群的磁通优化控制方法,也存在同样的问题.而采用速度模糊预补偿PI控制器可有效降低输出转矩脉动现象,并优化电机转速输出.
图4中,左图是传统PI控制下,电机的转速输出;右图是模糊优化后的电机转速.对比可知,改进方案使得电动机转速波动明显降低.图5中,左图是传统PI控制时的转矩控制效果,可以看出脉动现象比较明显.采用模糊预补偿后的结果在右图中给出,转矩脉动明显减小.

图4 驱动转速动态特性
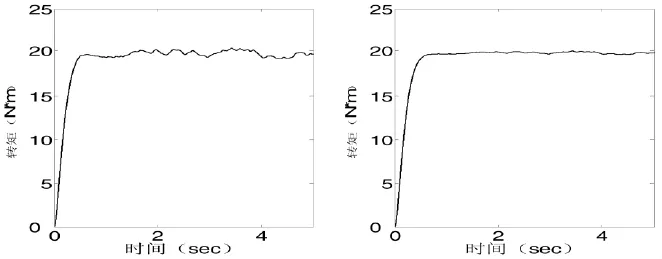
图5 电机转矩脉动输出
4 结论
以矿井提升机节能控制问题为研究背景,通过元器件分类方式分析了异步电动机的能量损耗模型.进而以气隙磁通为调节量,利用粒子群寻优降低了驱动电机在轻载阶段的磁通量,优化系统损耗,增强了提升机的工作效率.针对磁通降低造成电机转速/转矩波动问题,提出了模糊预补偿调速控制方案.实验结果显示:与传统PI控制方案相比,所提优化方案实现了异步电机的损耗降低的目的,同时降低了磁通变化带来的不良影响.将此方案应用于大功率的矿井生产系统,可明显提升系统性能.
[1]林显军,程小华,龙洪宇.异步电动机效率优化控制策略综述[J].微电机,2011,44(7):81-83,109.
[2]冯建民,周雨松,张紫薇,等.矿井提升机电控系统的现状与发展趋势[J].采矿技术,2011,11(6):82-84.
[3]A.Djoni,P.Crinela and B.Andrew.Energy Optimisation of Sensorless Induction Motor Drives Using a Novel RobustAdap -tive Flux Simulator[J].Proceedings of the 2ndInternational Electric Drives Production Conference,15th-18th October2012.
[4]曹建全,黄明.混合PSO算法优化异步电机矢量控制参数在矿井提升机的应用[J].煤矿机械,2012,33(4):206-208.
[5]J.G.Yadav,S.P.Srivastava.New Improved PSO Based Parameter Estimation for Energy Efficient Control of Induction Motor Drive[J].International Journal of Electronics Engineering,2012,4(1):95-99.
[6]鱼瑞文,周佩华,钱苗旺,等.基于模糊复合最优粒子群算法的矿用电机控制系统参数优化[J].煤矿机械,2012,33(3):72-74.
[7]杜彦涛,邓燕妮.异步电机模糊PI控制系统的仿真研究[J].仪表技术,2010,(5):28-30.
[8]朱建渠,张罡.三相异步电机模糊控制的研究[J].电力电子技术,2012,46(7):81-83.
[责任编辑:闫昕]
Fuzzy Pre-compensated Speed and Torque Optimization for Mine Hoist Loss Mininization with PSO
XUE Peng,TAO Chun-ming,HUANG Quan-zhen
(Department of Electrical Information and Engineering,Henan Institute of Engineering,Zhengzhou 451191,China)
Aiming at torque pulsation and speed fluctuation in energy saving control for mine hoist,fuzzy pre-compensated speed optimization scheme was proposed.A components power loss analysis was adopted to derive the induction motor loss model.An optimize air gap flux based on PSO(Particle Swarm Optimization)was also introduced to ensure power saving.Fuzzy pre-compensated reference controller was employed to decrease speed fluctuation due to the changes in flux and to reduce sensitivity to nonlinear,disturbances and perturbations.With a YVP-100 induction motor,experimental results show 0.1kw power saving with ensuring of performance optimization for torque and speed.
fuzzy logic;particle swarm;loss minimization;asynchronous motor
TM343
A
1004-7077(2015)02-0075-06
2014-12-22
河南省教育厅科学技术研究重点项目(项目编号:14B120006);河南工程学院博士科研启动基金(项目编号:
D201213).
薛鹏(1978-),男,河南郑州人,河南工程学院电气信息工程学院讲师,工学博士,主要从事先进智能控制,鲁棒控制,复杂系统分析等.
猜你喜欢
大电机技术(2022年5期)2022-11-17
防爆电机(2022年3期)2022-06-17
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
防爆电机(2022年2期)2022-04-26
上海大中型电机(2021年1期)2021-06-09
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
防爆电机(2020年4期)2020-12-14
防爆电机(2020年3期)2020-11-06
