
输电线路铁塔基础变形实验系统的设计
2015-02-18 08:32刘冠辰刘荣海
结构工程师 2015年6期
刘冠辰 王 孟 徐 辉,2 刘荣海
(1.华北电力大学 机械工程系, 保定 071003; 2.华北电力大学云南电网公司研究生工作站, 昆明 650217;
3.云南电网有限责任公司电力科学研究院, 昆明 650217)
输电线路铁塔基础变形实验系统的设计
刘冠辰1,2,*王孟1徐辉1,2刘荣海3
(1.华北电力大学 机械工程系, 保定 071003; 2.华北电力大学云南电网公司研究生工作站, 昆明 650217;
3.云南电网有限责任公司电力科学研究院, 昆明 650217)
摘要输电线路我们日常生活中扮演着十分重要的角色,而输电铁塔的基础对于线路的正常运行至关重要。对铁塔基础变形模拟实验装置进行了设计,选取了少自由度机构作为装置模型并进行3D建模,之后进行运动仿真,验证了利用该装置来模拟实验的可行性。仿真后选择合适的装置使得驱动方式满足三个方向的行程需求,利用基于虚拟仿真技术的实时控制方式解决了装置的控制问题,并根据使用条件对该装置进行了刚度和强度设计。
关键词基础变形, 输电铁塔, 少自由度机构, ADAMS仿真
Design of an Experimental System for Tower FoundationDeformation Testing
LIU Guanchen1,2,*WANG Meng1XU Hui1,2LIU Ronghai3
(1.Department of Mechanical Engineering,North China Electric Power University, Baoding 071003, China;
2.Graduate Workstation of North China Electric Power University & Yunnan Power Grid Corporation, Kunming 650217, China;
3.Electric Power Research Institute,Yunnan Electric Power Test & Research Institute Group Co Ltd, Kunming 650217, China)
AbstractTransmission lines are important infrastructure and the foundation stabilityof the transmission towers is essential for the power line safety. This paper presents the design of a foundation deformation experimental simulator, which selectsa lower-mobility parallel mechanism as the device model. With the help of the Pro/E and ADAMS, this paper simulated and finally validated the feasibility of this device. Through the use an appropriate driving method, it can achieve the route demands in three directions. With the advantage of a real-time control function based on the simulation technology, control issues were solved. Finally, on the basis of the working condition, the rigidity design of the device was completed.
Keywordsfoundation deformation, transmission tower, lower-mobility parallel mechanism, ADAMS
1研究背景
电力工业是国民经济的基础产业,电力供应的安全稳定直接关系到国民经济的发展和社会的和谐[1]。在经济全球化的大环境下,近十年来我国将成为世界制造业的中心,这对我国电力行业提出了更高的要求。一方面,迅速升高的用电量亟需大量电能支持;另一方面,我国能源分布严重不均,需要均衡资源。经济发展对电能需求量大,电网密集对输电走廊又有诸多限制,所以输电线路不可避免地经过煤矿开采、冻土等基础变形区[2]。受此类地形状态的影响,输电线路铁塔基础可能会发生沉降、倾斜、不均匀沉降、水平滑移等破坏,进而使铁塔的根开和塔腿高差发生变化,塔体结构产生较大的附加应力,造成塔体局部破坏或整体发生倒塌,直接威胁铁塔安全及线路的稳定运行。比如内蒙古乌海伊公线50号铁塔,山西省长治市境内的110 kV漳库I、II回15-22号铁塔[3]等,已有多处铁塔基础发生沉降、倾斜或滑移。这些安全隐患有可能导致许多不堪设想的事故。
2地表变形对铁塔的损害机理
2.1 地表下沉对高压输电铁塔的影响
输电铁塔属于点式高建筑物,铁塔基础规模相对不大、单塔占地面积较小,承受动荷载能力强、允许变形量大。但铁塔对倾斜变形非常敏感。因倾斜偏心矩的作用,这种高层构筑物在塔体任意截面内产生自重附加弯矩,在弯矩作用下,可能沿塔体中部某截面发生断裂破坏。作为输电线路的重要组成部分,铁塔动态变形规律成为高压输电线路能否安全运行的关键。铁塔突然的、局部陷落,可能导致线塔倾覆、断电等安全事故,必须加以防范。
地表下沉将引起输电铁塔的基础下沉,地下开采导致的地表下沉将引起高压输电铁塔基础的下沉,且铁塔基础底面的不均匀沉降将导致铁塔上层部分产生附加应力,当铁塔构件的内力在附加应力的作用下超过材料的容许应力时,将导致铁塔结构的破坏,引发安全事故。根据电力部门的实践经验,对于根开在4~7 m的自立式直线塔的不均匀沉降量必须控制在12.7~25.4 mm之间才能保证其自身的稳定性。相邻铁塔下沉的不一致对导线的近地距离也有一定的影响,这主要取决于沿线路的地形特征和相邻铁塔下沉的差异。铁塔位于采空区中间,一般易引起铁塔基础下沉、内收、塔身变形;铁塔位于采空区边缘时,一般易引起铁塔基础一侧下沉较多,并向各底滑落,塔身倾斜变形,如图1所示。

图1 地表不均匀沉降引起的铁塔倾斜Fig.1 Tower tilting caused by surface uneven settlement
2.2 地表倾斜对高压线塔的影响
高压输电铁塔基础底面积小,高度大,属于杆状构筑物,其对倾斜变形非常敏感。影响对象包括铁塔及其基础、绝缘子串、线路档距等,主要体现在:①开采导致的地表倾斜将引起高压线塔基础发生相应的倾斜。②档距的变化相应地引起线路弧垂、近地距离发生变化。铁塔倾斜引起导线中的应力重新分布,为了保持各档之间的应力平衡,悬垂串将发生偏移以平衡各档间的不平衡张力,悬垂串将向张力大的一侧偏斜,还可能引起导线对塔头放电事故的发生。③铁塔倾斜导致的导线松弛和倾斜后铁塔实际高度的减小,可能引起导线近地距离的不足。
2.3 地表水平变形对高压线塔的影响
地表水平变形通过铁塔基础的底面和侧面,使塔基受到附加的拉伸或压缩应力作用。地表水平变形对塔基的破坏作用很大,尤其是拉伸变形的影响[4]。塔基抵抗拉伸能力远小于抵抗压缩的能力,所以较小的地表拉伸变形可能使塔基产生开裂性裂缝。
2.4 地表曲率对塔基的影响
地表曲率变形表示地表倾斜的程度,由于出现了曲率变形,地表将由原来的平面变成曲面形状。在正负曲率作用下,各有两种情况,一种是塔基全部切入地基,另一种是塔基部分切入地基。塔基在受到正负曲率影响下,将使地基反力重新分布,改变了铁塔各部分原有的应力平衡状态。地表曲率的影响将使塔基受到附加的弯矩和剪力作用。一般情况下,地表的拉伸变形和正曲率变形同时出现,地表的压缩变形和负曲率变形也同时出现。其具体影响过程见图2[5]。

图2 地基变形对高压输电线路的影响Fig.2 Effects of ground deformation onhigh-voltage transmission lines
3实验装置设计及几何建模
3.1 实验装置模型要求
为了使实验装置可以模拟基础变形,需同时满足以下几点要求:①能实现对铁塔四个塔脚点X,Y,Z三个方向的位移调节。②四个塔脚点位移调节保证互不干涉。③根据实验需求要有足够的调节空间。④装置在调节过程中须能实现
自锁,保证某个方向的自由度为0。⑤保证足够的机械强度和刚度的同时,尽可能地减小因装置自身变形导致的误差。⑥装置调节过程中,每个方向力的施加最大值不应小于10 000 kN。
3.2 装置模型选取及依据
目前关于基础变形对铁塔影响的研究以理论研究为主,或是对发生基础变形区域的铁塔进行测量和测试,收集数据进行研究,涉及单独实验很少[6]。本次设计需依据试验对装置的要求选取合适模型,目前能调节三个方向位移的机械结构主要有导轨式结构(图3)和机器人中应用的多自由度结构(图4)。

图3 导轨式三自由度机构Fig.3 A rail with 3 degrees of freedom

图4 六自由度平台Fig.4 A plate with 6 degrees of freedom
对比两种结构前者具有结构简单易于调节的优点,但此装置需要有较好的承力性能,图3所示的结构不具有此项功能。图4所示的结构虽然较为复杂,但是结构稳定、施力功能和刚度较好,能满足实验要求。由于其具有六个自由度的调节功能,且控制系统复杂,所以本次装置选了类似的一种简单的结构如图5所示。

图5 少自由度并联机构Fig.5 Less DOF mechanism
3.3 少自由并联机构介绍
所谓并联机构,即有多自由度,而且驱动器分配在不同环路上的闭式多环机构,并联机构具有刚度大、承载能力强、位置精度高、响应快等许多串联机构所没有的优点。并联结构有如下特点:
(1) 并联机器人其末端件上平台同时由3根或6根驱动杆支撑,因而刚度大,承载能力与整机质量比大,结构稳定性好;
(2) 在位置求解上,反解容易而正解困难,由于实时控制中经常用到的是机构的逆解计算,所以说,实时控制比串联机构简单;
(3) 和串联机器人不一样,不存在误差累积和放大,各杆件误差形成平均值误差小,可获得较高的运动精度;
(4) 运动铰链较短,驱动装置可以直接安装在机架处,零件标准化程度高易于实现模块化设计;
(5) 并联机器人工作空间与机器尺寸比小;
(6) 机器人运动部件质量轻,因此响应速度快,可获得很高的动态特性,运动速度高,运动惯性小。
本文利用螺旋理论来分析新型少自由度并联机构,利用运动螺旋和力螺旋之间的对偶关系,建立少自由度并联机器人机构类型综合的结构模型。因为并联机器人机构是由支链、动平台和静平台组成,其结构的设计关键在于其各支链的结构形式,各支链的设计是机构设计的重点,按机构对各分支约束条件的要求,设计出有能够符合要求的所有支链结构形式,进在考虑避免奇异位形的基础上将所需的分支与平台联接成为所要求的少自由度并联机器人机构。接下来可以通过ADAMS仿真验证其运动特性及控制方式[7]。
4基于ADAMS运动特性仿真及控制仿真
本节将对上述少自由度并联机构进行运动学仿真,验证其运动特性。并在原有机构基础上改变其驱动方式,通过仿真反解其控制方式。
4.1 机械系统动态仿真步骤
机械系统的仿真一般步骤如图6所示。

图6 机械系统动态仿真分析步骤Fig.6 Mechanical system simulation analysis flow chart
按原模型给装置添加驱动,在静平台转轴处添加转动驱动,速度为15 d*time,将step设置为5 000,进行模拟可以观察动平台运动效果。由ADAMS的后处理功能能观察每个构件的运动速度、角速度、加速度及位移。图8是上述模拟过程中动平台在X,Y,Z三个方向的位移随时间变化情况。

图7 在ADAMS中建立的装置模型Fig.7 ADAMS model

图8 动平台在单转动副驱动下三向位移随时间变化曲线Fig.8 Three-direction displacement in singlerotation of the moving platform
为了验证其运动特性,需要观察运动过程中动平台的角速度,如图9所示。由图可以看出,动平台的角度在10-9数量级,可以忽略不计。
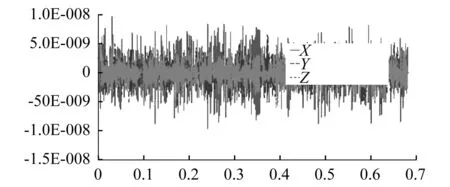
图9 动平台的角速度变化Fig.9 Angular velocity of the moving platform
由模拟得出的位移及速度变化图可以得出以下结论:
(1) 试验装置具有三个方向的移动自由度,在模拟过程中角速度几乎为0,不具有转动自由度。
(2) X,Y两个方向的可以通过两个转动副的协调驱动,来实现其沿X,Y方向的单向运动。
(3) 装置动平台在Z方向位移不为零,位移量很小,且随时间变化呈非线性,将三方向的位移置于同一坐标系下,由于变化量较小,Z方向位移可忽略,如图10所示。

图10 动平台在单转动副驱动下X,Y,Z三个方向位移随时间变化Fig.10 Displacements of the movingplatform in X, Y, Z direction
4.2 可行性分析
本次设计初衷是通过所选模型三自由度并联装置实现对铁塔四个脚点三个方向位移的调节。由上节的模拟结果可以看出此装置在动平台单转动副驱动下的运动特性:X,Y方向成线性变化,Z方向的位移量很小可以忽略。所以通过转动副驱动只能实现X,Y方向的移动控制,且实现单向运动时有如下困难:
(1) 协调性问题不容易解决,单向运动需要两个转轴按一定速率比运动。
(2) 动力不易添加,由于此装置在改变位移时需要很大的力,所以转动副处需要的转矩非常大,所以能控制转动速度的动力很难添加。
(3) 自锁问题不容易解决,装置改变塔脚点位移后需要通过自锁机构锁定动平台位置,一般机械机构中转动自锁靠涡轮蜗杆来实现,但这种机构会与动力添加产生矛盾。
(4) 构件强度问题,由于转动副处转矩非常大,所选材料尺寸会很大,从而影响整个机构空间尺寸及布置方式。
综上所述,此装置在转动副上加不能完成对踏脚点的Z方向位移调节,且对X,Y方向的调节不易控制,所以需要改变驱动方式。
4.3 驱动方式的选择及控制实现
由上节结论可知,需通过改变驱动方式来实现其调节功能。另外两个运动副分别为圆柱副和移动副,而在圆柱副处添加驱动不易实现且不能解决Z方向行程不足的问题,所以选择在移动副处添加驱动。为了使控制方便精准,驱动构件选择液压缸。这种控制方式有如下优点:
(1) 解决了Z方向行程不足的问题,Z方向的行程可通过三个液压缸的同步伸缩完成。
(2) 系统受力状况好,装置的动平台由液压缸控制,主要控制力为液压缸的轴向力。
(3) 提高了装置刚度,本装置的刚度主要由连接件的轴向变形决定[17],改为液压缸后就能通过液压缸的伸缩弥补由轴力引起的微小变形。
(4) 控制精度高,液压缸具有较高的控制精度,能减小由装置引起的误差。
本驱动方式需要解决如何控制上平台按预定方向及位移移动的问题[8]。目前解决这种问题的主要方法有正解法和反解法[9],而这两种方法在计算上都比较复杂,上海交通大学提出了一种基于虚拟仿真技术的实时仿真控制。这种控制方法基本思想是通过仿真让动平台运动到预定位置,反解出液压缸的运动曲线后,将此运动曲线作为控制器的输入数据完成对平台的实时控制。本次控制计划采用上述方法,基本虚拟仿真的实时控制原理图如图11所示。

图11 基于虚拟仿真的实时控制原理图Fig.11 Virtual simulation-based real-time control scheme
下面通过ADAMS模拟两种工作状况,并得出运动曲线及液压缸的长度变化曲线。工况(一):给上平台加两个方向的位移驱动,X方向给定速度20 mm/s,Z方向速度20 mm/s,运动时间为1 s,步数1 000,图12是工况(一)动平台位移曲线,图13是三个连接件的长度变化。

图12 动平台位移曲线Fig.12 Displacement of moving platform

图13 三连接件的长度变化Fig.13 Length change of rads
由工况(一)的运动曲线可以得出以下结论:
(1) 该平台能实现预定位移单双向运动(单向平动已在装置运动特性中说明过),且不产生干涉(模拟中Y方向没有位移)。
(2) 可以通过仿真模拟得出运动过程中三个连接杆的长度,且有较高精度。该装置在实际工作过程中还可能有三向位移调节需求,工况(二)将模拟该装置三向运动特性并验证其控制方法。
工况(二)给上平台加三个方向的位移驱动,X,Y,Z三个方向都给同样的速度20 mm/s,运动时间为1 s,步数1 000,如图14所示。
图15是连接杆长度变化。

图15 连接杆长度变化Fig.15 Length change of rods
由上面的运动曲线可知,该装置可以实现预定三向位移的调节功能,所得运动曲线符合要求,且三个方向位移互不干涉。测得杆长变化精准,可以实现其控制功能。
5实验装置受力分析
5.1 构件机构载荷校验
试验装置主要靠三个支撑杆承力及施压,由于其在调节过程中空间位置有多种,受力状况比较复杂,在此选取一种受力最大的工作状况进行分析,如图16所示。
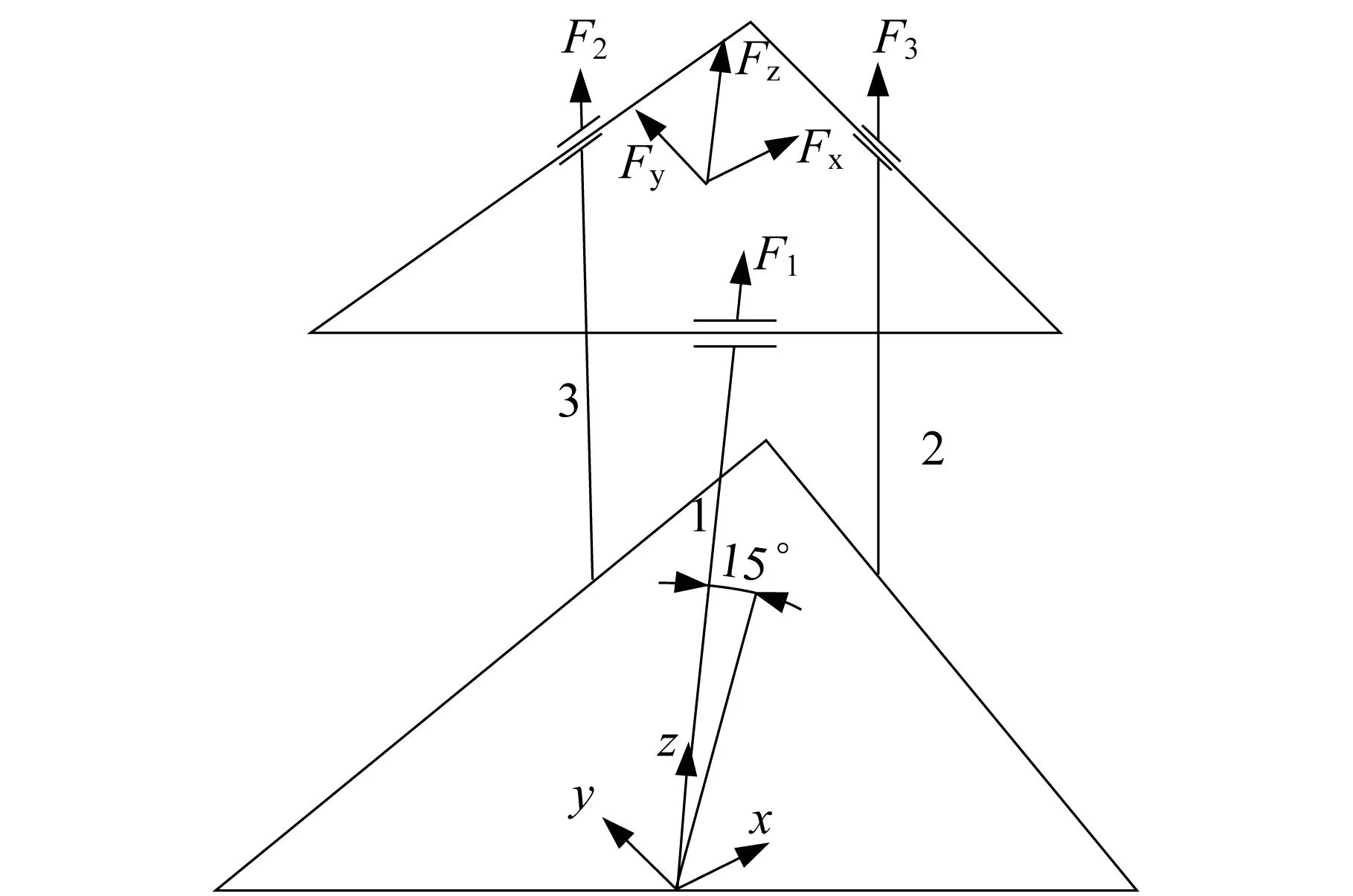
图16 机构受力简图Fig.16 Force diagram
令支撑杆1内旋15°,并使坐标系X,Y轴都与支撑杆1的投影线呈45°。此时X,Y,Z三个方向的静力平衡方程如下:
∑Fx=F1×sin15°×sin45°-Fx=0
∑Fy=F1×sin15°×sin45°-Fy=0
∑Fz=F1×sin15°+F2+F3-Fz=0
由于铁塔作用在动平台上的力相对于三个支撑杆的垂直距离相差不大,这里取等值。则补充的力矩平衡方程为:
F1×sin15°=F2=F3
取设计参数Fx=Fy=Fz=5×104N。则由以上公式可得:
F1=109.68 kN
F2=16.67 kN
F3=16.67 kN
5.2 构件强度校验
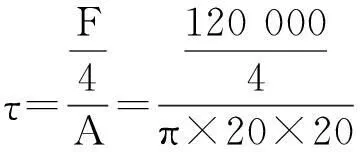
该装置受力状况良好,装置所承受的力主要是三个液压缸所在的连接结构的轴力,所以只需校验动静两平台上轴及动平台连接螺栓的剪切强度即可。
(1)转轴剪切强度校验
如图17(a)所示,取轴力设计值F=120 kN,有:

图17 转轴受力示意图Fig.17 Force of the shaft

且:

满足强度要求。
(2)动平台连接螺栓校验
如图17(b)所示,取F=120 kN,有:
且:
满足强度要求。
6结论
本文对输电线路铁塔基础变形实验系统的设计,主要做了下述三部分工作:
(1) 选取了机器人中的少自由度并联机构作为装置模型,该机构具有刚度大、精度高、结构紧凑等优点,是实验装置的理想模型。
(2) 利用三维建模软件建立了几何模型,通过ADAMS实现了其运动特性的模拟。
(3) 利用仿真模拟解决了装置的控制问题。根据装置的使用条件,对装置进行了机械结构设计,并对装置进行了强度校验。
本文主要的创新点是少自由度并联机构的引入,设计过程中解决的难题是改变驱动方式后的控制问题。总体来说本次设计的装置满足了实验需求,装置刚度大,精度高,结构紧凑,效果比较理想,可以应用于铁塔基础变形实验。
参考文献
[1]龙驭球,包世华.结构力学教程(Ⅰ)[M].北京:高等教育出版社,2003:70-81.
Long Yuqiu,Bao Shihua.Structural mechanics tutorial(Ⅰ)[M].Higher Education Press,2003:29(4):42-50.(in Chinese)
[2]胡明,房海蓉,郭盛.基于Pro/E 和ADAMS 的少自由度并联机构运动仿真[J].CAD/CAM与制造业信息化,2011(6):94-95.
Hu Ming,Fang Hairong,Guo Sheng.Less DOF parallel kinematic simulation Pro/E and ADAMS-based[J].CAD/CAM and Manufacturing Information,2011(6):94-95.(in Chinese)
[3]杨风利,杨靖波,韩军科,等.煤矿采空区基础变形特高压输电塔的承载力计算[J].中国电机工程学报,2009(3):19-21.
Yang Fengli,Yang Jingbo,Han Junke,et al.UHV transmission tower carrying capacity of coal mined zone deformation calculation basis[J].Chinese Motor for Electrical Engineering,2009(3):19-21.(in Chinese)
[4]中华人民共和国发展与改革委员会.DL/T 5219—2005架空送电线路基础设计技术规定[S].北京:中国电力出版社,2005.
Development and Reform Commission,People’s Republic of China.DL/T 5219—2005Overhead transmission line foundation design technical requirements[S].Beijing:China Electric Power Press,2005.(in Chinese)
[5]Ahmed K I E,Rajapakse R K N D,Gadala M S.Influence of bolted-joint slippage on the response of transmission towers subjected to frost-heave[J].Advances in Structural Engineering,2009,12(1):1-17.
[6]孙冬明,夏军武,常鸿飞.地下开采后送电线路铁塔的受力性能研究[J].武汉理工大学学报,2010(5):22-25.
Sun Dongming,Xia Junwu, Chang Hongfei.Research on the mechanical behavior of underground mining evacuation of the power line tower[J].Journal of Wuhan University of Technology,2010(5):22-25.(in Chinese)
[7]郑建荣.ADAMS-虚拟样机技术入门与提高[M].北京:机械工业出版社,2002.
Zheng Jianrong.ADAMS-entry and improve virtual proto typing technology[M].Beijing: Machinery Industry Press,2002.(in Chinese)
收稿日期:2014-11-06
*联系作者, Email:Ljzmax@qq.com
