
深部综放大断面沿空掘巷小煤柱尺寸优化及控制技术
2015-02-20 04:04苏海
采矿与岩层控制工程学报 2015年2期
关键词:控制技术
苏 海
(1.中国矿业大学(北京)资源与安全工程学院,北京100083; 2.潞安集团余吾煤业有限责任公司,山西长治046103)
深部综放大断面沿空掘巷小煤柱尺寸优化及控制技术
苏海1,2
(1.中国矿业大学(北京)资源与安全工程学院,北京100083; 2.潞安集团余吾煤业有限责任公司,山西长治046103)
[摘要]针对深部综放大断面沿空掘巷小煤柱宽度确定的难题,以东滩煤矿沿空巷道小煤柱尺寸确定为例,首先通过对小煤柱力学模型分析确定小煤柱宽度应大于2.74m;然后经过数值模拟研究不同尺寸小煤柱下巷道围岩的变形规律,确定小煤柱合理尺寸为4m左右;提出合理的围岩控制技术。现场试验表明,生产期间小煤柱稳定性较好,沿空掘巷整体稳定,变形量得到了有效控制。
[关键词]深部综放;沿空掘巷;煤柱尺寸优化;控制技术
[引用格式]苏海.深部综放大断面沿空掘巷小煤柱尺寸优化及控制技术[J].煤矿开采,2015,20 (2) : 39-42.
随着浅部煤炭资源的逐渐减少,我国东部大多数矿井都相继进入深部开采阶段[1]。深部开采由于受到高地应力和强烈开采扰动的影响,巷道变形量大、矿压显现剧烈,这对深部煤炭资源的安全高效开采造成了巨大威胁[2]。近年来沿空掘巷技术得到广泛应用,但其巷道围岩变形明显大于宽煤柱护巷。合理的煤柱尺寸和稳定性是沿空掘巷稳定的关键,目前针对沿空掘巷合理位置及控制技术的研究较多[3-8],而针对综放大断面沿空掘巷窄煤柱宽度的确定研究较少。因此,本文以东滩煤矿1306综放大断面沿空掘巷为工程背景,采用理论分析确定窄煤柱宽度的合理范围,然后通过FLAC3D数值模拟软件研究不同尺寸煤柱下巷道围岩的变形规律,确定出合理的煤柱尺寸,提出可靠的加固技术,在现场取得了良好的控制效果。
1 试验巷道工程概况
东滩煤矿1306轨道巷位于一采区中部,巷道南邻1305综放面采空区,巷道平均埋深超过600m。1306工作面所采煤层为3煤,平均厚度9.0m,平均倾角6°,煤层坚固性系数f = 2~3。煤层结构复杂,内生裂隙发育,煤层沉积稳定,厚度变化较小。其顶底板情况如表1所示。
1306轨道巷断面为梯形,沿煤层底板掘进,巷道掘进高度4.0m,下底掘进宽度5.2m,上底掘进宽度5.0m,掘进断面面积S掘= 20.4m2。
2 合理煤柱尺寸的力学分析研究
窄煤柱的力学模型如图1所示。假设沿空掘巷窄煤柱两侧受到大小相同的支护阻力p,τxy为煤层与巷道顶底板界面处的剪切应力,h为巷道高度; x1为巷帮至煤柱极限强度发生处的距离,σym为煤柱的极限强度(即支承压力峰值) ;为煤体残余强度; d为煤柱宽度。

图1 窄煤柱帮力学模型
考虑到煤体的残余强度后[9],巷道煤柱侧破碎区的宽度(即巷帮距煤柱极限强度发生处的距离) Ls:

式中,λ为侧压系数;φ0为煤体内摩擦角,(°) ;γ为上覆岩层平均容重,MN/m3; H为巷道埋深,m; c0为黏聚力,MPa。
由该公式计算出沿空掘巷护巷煤柱两侧破碎区的宽度Ls,若2Ls﹤d,则说明所选取的煤柱宽度符合要求;若2Ls﹥d,则说明整个煤柱都处于破碎状态,锚杆锚固段处于破碎区煤体中,对围岩的控制效果大大降低,不能有效控制巷道的变形。
以东滩煤矿1306轨道巷的地质条件为例,各参数的选取如下:沿空巷道高度h=3.8m;侧压系数λ= 0.41;煤体内摩擦角φ0= 30°;上覆岩层平均容重γ= 0.026MN/m3;巷道埋深H = 600m;黏聚力c0= 3.5MPa;残余强度= 1.73MPa;巷道煤帮的支护阻力p = 0.09MN/m2。可得回采期间窄煤柱侧破碎区宽度Ls= 1.37m,煤柱宽度d应大于2Ls,即煤柱宽度d应大于2.74m。
3 合理煤柱尺寸的数值模拟研究
为确定合理的煤柱尺寸,采用FLAC3D数值模拟软件建立模型,模型尺寸为600m×240m×150m(长×宽×高),巷道尺寸为5m×3.8m (宽×高),在巷道周围进行网格的局部细化,如图2所示。分别模拟了3m,4m,5m和6m煤柱下沿空掘巷在掘进、回采期间围岩的变形规律。模拟采用莫尔-库仑(Mohr-Coulomb)屈服准则,所采用的煤岩层物理力学参数如表2所示。
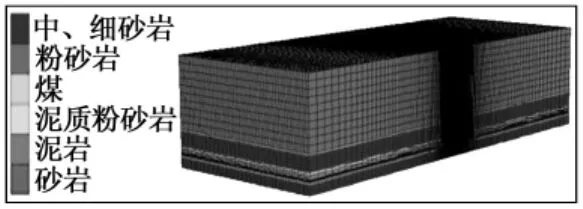
图2 数值计算模型
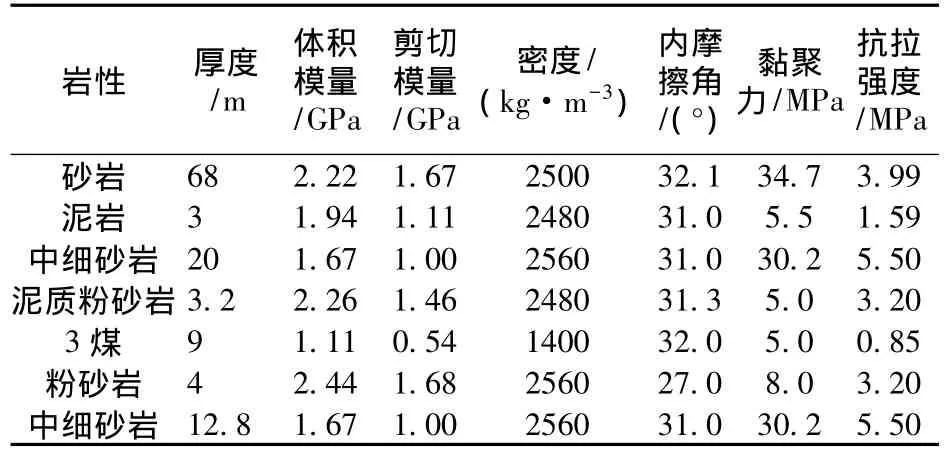
表2 各岩层物理力学参数
掘进期间不同尺寸煤柱下沿空掘巷水平位移云图如图3所示。
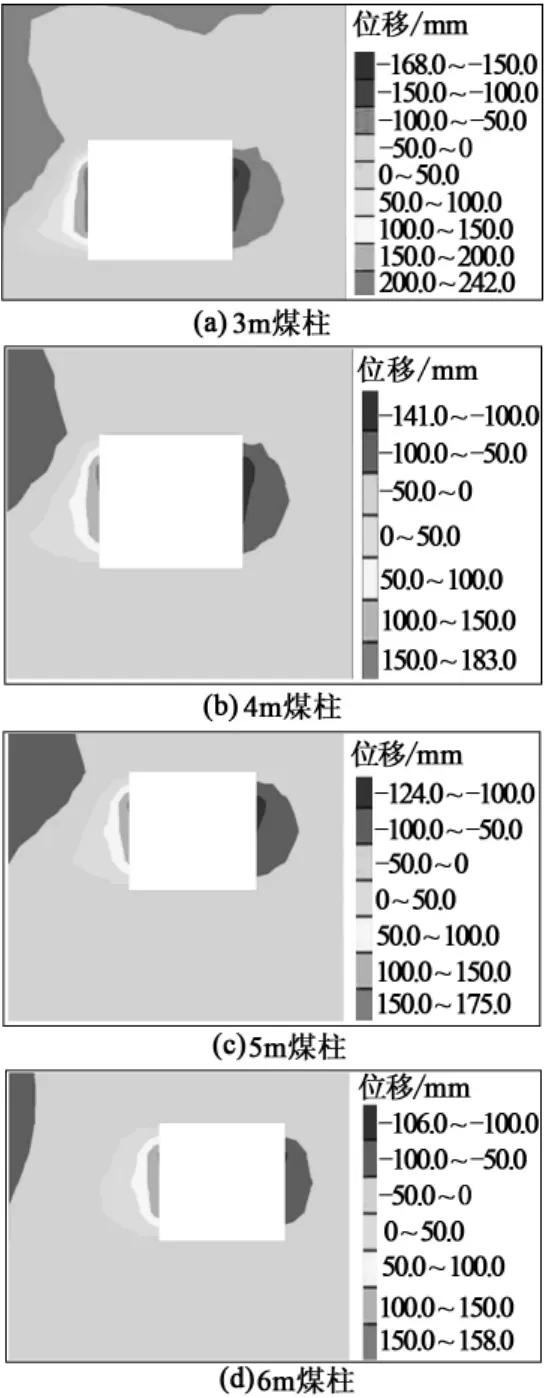
图3 不同宽度煤柱下掘进期间沿空掘巷水平位移
回采期间不同尺寸煤柱下沿空掘巷水平位移云图如图4所示。
掘进、回采期间不同煤柱尺寸下沿空掘巷顶底板和两帮的变形曲线如图5,图6所示。
由图5,图6可知:
(1)当煤柱宽度为3m,4m,5m和6m时,掘进期间窄煤柱帮最大水平位移分别为223mm,159mm,149mm和142mm,两帮最大水平位移分别为340mm,270mm,256mm和242mm,顶底板最大变形量分别为427mm,294mm,263mm和254mm;回采期间窄煤柱帮最大水平位移分别为366mm,344mm,331mm和323.1mm,两帮最大水平位移分别为1234mm,1034mm,978mm和930mm,顶底板最大移近量分别为655mm,541mm,503mm和489mm。

图4 不同宽度煤柱下回采期间沿空掘巷水平位移
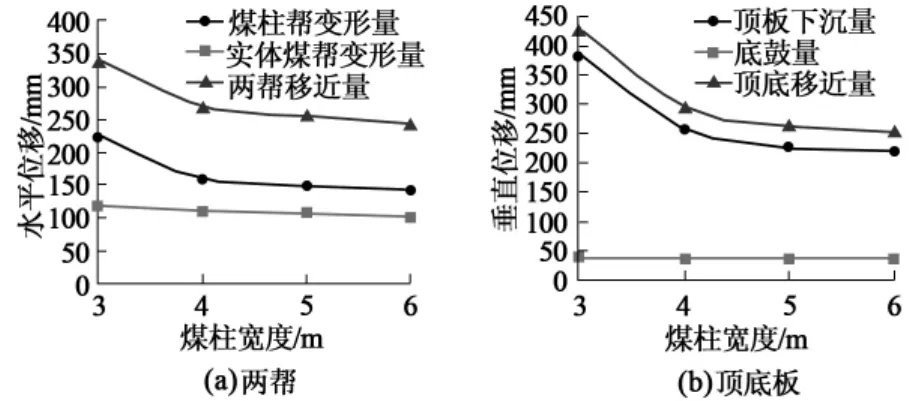
图5 掘进期间两帮和顶底板最大变形量

图6 回采期间两帮和顶底板最大变形量
(2)掘进、回采期间巷道变形量均随着煤柱宽度的增加而减小,3m煤柱时巷道变形量最大,随着煤柱宽度的增加,掘进时期两帮水平位移降幅分别为70mm,14mm和14mm,回采时期两帮水平位移降幅分别为200mm,56mm和48mm。3m与4m煤柱间围岩变形量降幅最大; 5m,6m煤柱变形量变化较小。
综合考虑模拟结果及提高资源采出率,所留设煤柱在保证围岩稳定的同时尺寸不宜过大,因此确定合理的煤柱尺寸为4m左右。
4 沿空巷道围岩加固技术
4.1围岩控制原则
对于深部综放沿空掘巷来说,合理有效的支护措施是采用多种支护手段及时进行支护,阻止围岩破碎区的进一步发育,尽量保持巷道周边围岩的完整性,尤其是小煤柱,提高围岩自身承载能力,同时允许一定的变形量,以缓解巷道周边较高的应力集中。因此,为有效控制围岩,保持沿空掘巷的稳定,提出以下控制原则:合理设计巷道断面,允许适当的变形量;及时支护;采用高强度、大延伸率锚杆、锚索支护;保持围岩稳定,提高围岩承载能力;回采期间加强超前支护。
4.2沿空掘巷控制技术
东滩煤矿沿空掘巷原支护方式主要以锚杆支护为主,巷道在使用过程中煤柱失稳变形,两帮变形量最大达4.3m,顶底板移近量最大达1.8m,巷道多次返修,大大增加了生产成本。因此,在原支护参数的基础上,提出锚网带与锚索联合支护方式,如图7所示。
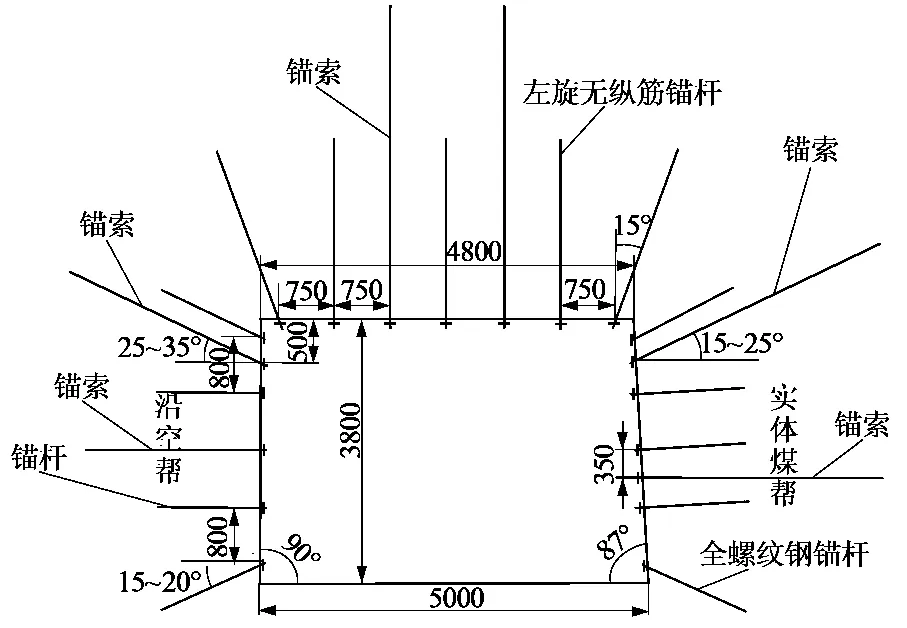
图7 1306轨道巷支护
4.2.1顶板支护
4.2.2小煤柱帮支护
4.2.3实体煤帮支护
5 沿空掘巷控制效果
为验证上述支护方式及参数的支护效果,采用“十字”布点法在1306沿空巷布置位移监测点,监测结果如图8、图9所示。
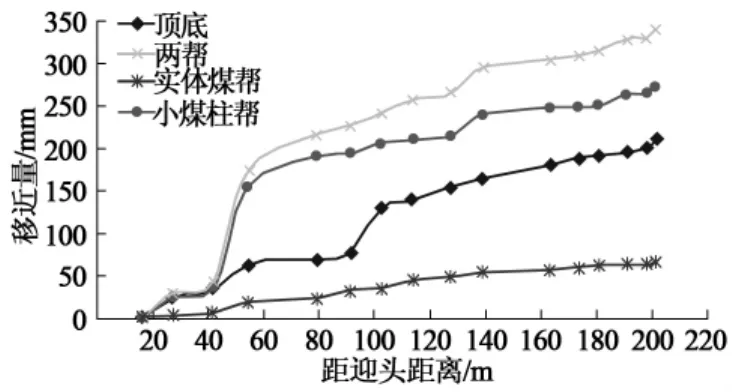
图8 掘进期间巷道表面位移随距离变化曲线
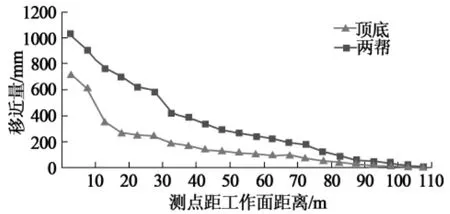
图9 回采期间巷道表面位移随距离变化曲线
由图8、图9分析可知:
(1)掘进期间随着测点远离掘进迎头,巷道变形逐渐增大并最终趋于稳定。巷道顶底移近量210mm,实体煤帮移近量67mm,小煤柱帮移近量273mm,两帮移近量340mm。
(2)回采期间随着测点和工作面距离的减小,围岩变形逐渐增大。顶底移近速度最大可达到265mm/d,两帮移近速度最大达到225mm/d,巷道顶底板最大移近量为755mm,两帮最大移近量为1030mm。回采期间应加强超前支护,使其满足安全生产的需要。
6 结论
(1)对沿空掘巷窄煤柱的力学模型进行分析,计算出东滩煤矿1306轨道巷窄煤柱侧破碎区宽度Ls=1.37m,煤柱宽度d应大于2Ls,即煤柱宽度d应大于2.74m。
(2)运用FLAC3D数值模拟软件模拟3m,4m,5m和6m煤柱下围岩的变形规律,得出3m与4m煤柱间位移降幅最大; 5m,6m煤柱间变形变化较小,由此确定合理的煤柱尺寸为4m左右。
(3)深部综放大断面沿空掘巷围岩变形量大,小煤柱承载能力较低,易发生失稳变形。支护应确保小煤柱既要有较高的承载能力,又能够适应顶板的下沉,起到“让”的作用。
(4)沿空掘巷采用新的支护方案后,沿空巷道变形量均得到了有效控制,小煤柱稳定性好,沿空巷道整体稳定,能够满足正常生产的需要,为综放开采的高产高效提供了保障。
[参考文献]
[1]王旭锋,张东升,邵鹏,等.深部软岩锚喷支护巷道快速掘进技术[J].采矿与安全工程学报,2011,28 (3) .
[2]徐文全.采动空间围岩应力监测技术及应用研究[D].徐州:中国矿业大学,2012.
[3]朱若军,郑希红,徐乃忠.深井沿空掘巷小煤柱合理宽度留设数值模拟研究[J].地下空间与工程学报,2011,7(2) .
[4]高思强,高久国,孙燕青.深井沿空掘巷顶帮整体锚索桁架的应用[J].煤矿开采,2014,1 (2) : 77-81,84.
[5]李磊,柏建彪,王襄禹.综放沿空掘巷合理位置及控制技术[J].煤炭学报,2012,37 (9) : 1564-1569.
[6]徐佑林,桂祥友,张辉,等.不同宽度煤柱下沿空掘巷数值模拟研究及应用[J].煤矿开采,2011,16 (5) .
[7]柏建彪.综放沿空掘巷围岩稳定性原理及控制技术研究[D].徐州:中国矿业大学,2002.
[8]赵国贞,马占国,孙凯,等.小煤柱沿空掘巷围岩变形控制机理研究[J].采矿与安全工程学报,2010,27 (4) .
[9]马传乐.深部综放沿空掘巷围岩变形破坏特征及控制技术[D].青岛:山东科技大学,2014.
[责任编辑:林健]
Dimension Optimization of Small Coal-pillar for Protecting Large-section Roadway Driven along Gob in Deep Full-mechanized Caving Mining Face
SU Hai1,2
(1.Resources&Safety Engineering School,China University of Mining&Technology (Beijing),Beijing 100083,China;
2.Yuwu Coal Industry Co.,Ltd.,Lu'an Group,Changzhi 046103,China)
Abstract:In order to rational confirm width of coal-pillar for large-section roadway driven along gob in deep full-mechanized caving mining face of Dongtan Colliery,firstly,the width of small coal-pillar was calculated to shall be larger than 2.74m by mechanics model analysis,secondly,deformation rule of surrounding rock of roadway with different widths was simulated numerically to shall be about 4m.Rational control technology of surrounding rock was put forward.On-the-spot test showed that small coal-pillar in mining was wholly stable and roadway deformation was effectively controlled.
Keywords:deep full-mechanized caving mining; driving roadway along gob; dimension optimization of coal-pillar; control technology
[作者简介]苏海(1973-),男,山西长治人,在读博士生,高级工程师,余吾煤业公司总经理,从事煤矿管理工作。
[基金项目]国家自然科学基金青年科学基金资助项目(51104093)
[DOI]10.13532/j.cnki.cn11-3677/td.2015.02.012
[收稿日期]2014-07-28
[中图分类号]TD353
[文献标识码]A
[文章编号]1006-6225 (2015) 02-0039-04
猜你喜欢
机电安全(2022年1期)2022-08-27
飞控与探测(2021年4期)2021-11-26
当代水产(2021年8期)2021-11-04
民用飞机设计与研究(2020年1期)2020-05-21
建材发展导向(2019年13期)2019-08-24
电子制作(2019年7期)2019-04-25
电子制作(2018年16期)2018-09-26
山东工业技术(2016年15期)2016-12-01
照明工程学报(2016年3期)2016-06-01
导航定位与授时(2014年2期)2014-04-27
