
动态环境可实时定位无线信标机系统设计
2015-02-23 08:28曹翱翔张会新刘文怡中北大学仪器科学与动态测试教育部重点实验室太原030051电子测试技术重点实验室太原030051
电子器件 2015年4期
曹翱翔,张会新,刘文怡*(1.中北大学仪器科学与动态测试教育部重点实验室,太原030051; 2.电子测试技术重点实验室,太原030051)
动态环境可实时定位无线信标机系统设计
曹翱翔1,2,张会新1,2,刘文怡1,2*
(1.中北大学仪器科学与动态测试教育部重点实验室,太原030051; 2.电子测试技术重点实验室,太原030051)
摘要:提出一种动态环境下能实时定位箭载记录器的回收系统方案。由随记录器一起下落的信标发射机、天上无人机及地面接收设备组成的搜索网络,实时获取记录器的位置信息。经实验得出,记录器在空中某一时刻的位置信息:纬度39°04.182 64,经度111°44.721 32,海拔高度1 411.1 m;落地后位置信息:纬度39°04.165 00,经度111°44.730 90,海拔高度1 333.0 m。结果表明,根据实时得到的位置点绘制出了下落轨迹,实现了对记录器的快速找寻。关键词:电路设计;实时定位;信标机; GPS;无人机
无线信标机作为单向发射器[1],目前已在军、民很多领域得到广泛应用,覆盖陆海空各个方面。在航海船只搜救以及远足者搜救等领域的信标机技术都已经比较成熟,市场上也已有不同类型各种应用的产品出现。然而在航空领域针对于记录器的回收却没有成熟的、抗过载性能好、功率大、体积小的专用信标机,因此展开这方面的应用研究是十分有必要的。本文介绍一种应用在箭载记录器回落搜索方面,基于动态环境下面临的问题提出设计方法,最后通过测试表明,该设计稳定可靠,可在实际中推广应用。
1 系统简介
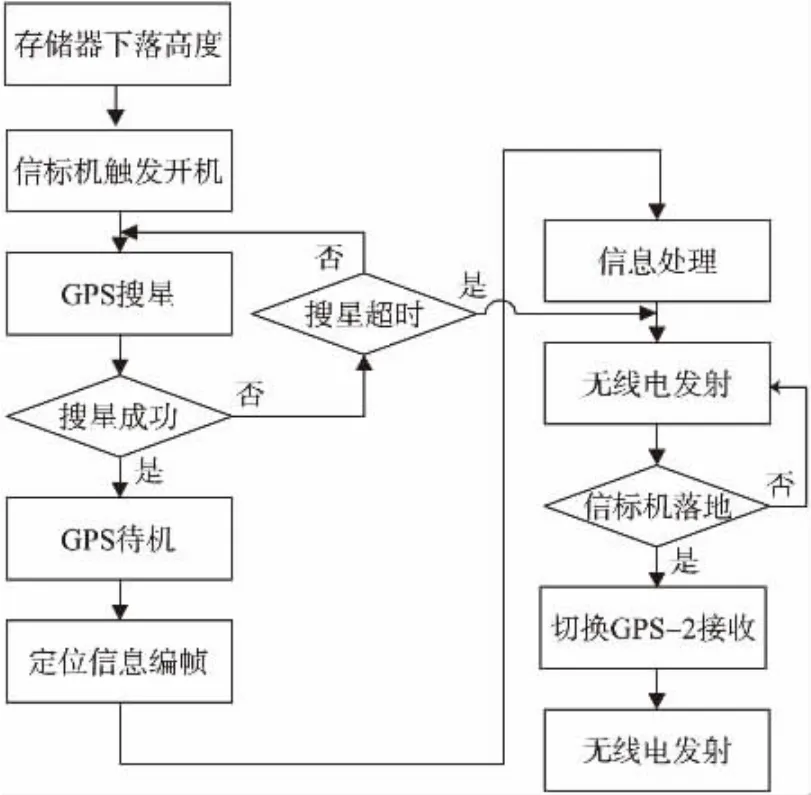
图1 系统框图
本系统工作流程图1所示。当记录器下降到25 km高度时记录器上的高度计提供给信标机发射机一个触发脉冲,信标机便开始发射无线信号并进行搜星任务,在预计落点区域内,无人机搜索设备在天上循环飞行进行信号搜索,同时把接收到的信息一方面实时发送到地面接收机一方面存储起来,与此同时地面搜索设备在预定区域内进行搜索信号和接收空中无人机信号的任务。
2 硬件设计
2.1GPS模块
针对动态使用环境,在GPS模块选型中,本文采用国内厂商东方联星生产的GPS模块CNS50-GPS,可良好适应下落时的动态环境以及在民用领域选择较多的U-BLOX公司的GPS导航模块MAX-6Q。GPS模块已经将本身核心CPU、基带芯片、RF射频芯片以及相关的外围电路集成在了一起。数据手册上可查到MAX-6Q模块的参考电路设计,使用单片机的串口可以和其串口功能直接连接实现数据接收。对于CNS50-GPS模块,其包含两种数据格式:NMEA 0183和二进制格式,数据输出接口4个,使得设计更具多样性灵活性。GPS接收电路如图2所示。
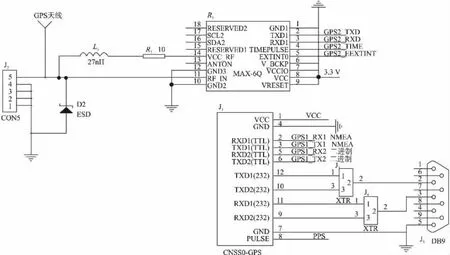
图2 GPS接收电路图
2.2信标机控制单元
控制单元作为系统的核心单元,控制着整个系统的任务调度以及功耗、数据处理等各个部分的工作情况。考虑到GPS传输速率和数据长度,本系统处理单元核心器件采用了CYGNAL公司的单片机C8051F040。单片机系统电路设计包含程序下载电路和时钟电路,需3.3 V电源供电,GPS模块的信息可通过串口来读取,同时GPS参数也可以通过串口对其进行更改,例如数据更新率、数据传输格式等。通过单片机来控制GPS模块的供电部分,从而可灵活的控制GPS工作,达到降低功耗的目的。后级射频模块可通过与C8051F040的串口相连接,通信波特率设置为9 600。
2.3信标机无线传输单元
本设计系统中,射频模块作为无线通信设计中的一部分,可以直接与CPLD或者单片机串口相连进行数据传输,并在其本身内部集成好载波调制和伪码电路设计,电路连接示意图如图3所示。本设计采用的是美国DIGI公司的XTendTM900模块进行组网设计,无线通信射频模块使用5 V电源供电,含有20个设计管脚,其中第7管脚可以用来控制模块的工作状态实现功耗控制,通过上位机软件的配置,可直接与CPLD和单片机等芯片实现硬件数据流控制和串口数据收发,本设计以9 600波特率进行通信。

图3 电路连接框图
2.4接收系统和转发系统设计
在无线接收设备中,射频前段使用相同的收发单元,通过对射频单元参数设计,可以使收发端具有相同的伪码序列和频率跳变,达到收发同步。采用单片机对后级数据进行处理,对接收的数据经过CPLD芯片进行“串-并”转换,形成8位数据格式,经过FT245接口电路生成USB格式数据流传输到上位机,由上位机地图软件显示当前位置。其中并口电路转USB电路如图4所示。
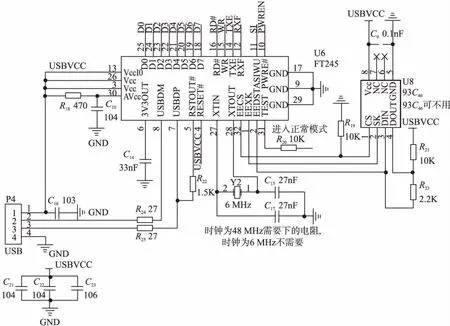
图4 并口电路转USB电路
2.5信标机供电单元
供电模块起到为整个系统提供能量的作用,电源电路设计时不仅需要考虑其充足的电量和稳定的电压,还需要纯净的电源,即电源纹波小,对电路板电路的干扰尽量小。供电模块功能框图如图5所示。
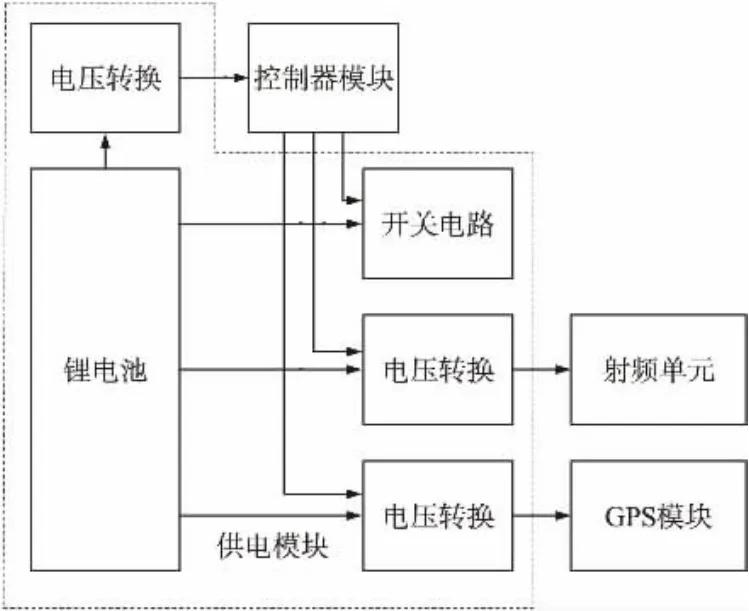
图5 供电模块功能框图
3 试验结果
3.1MAX-6Q模块测试
应用于信标发射机上的GPS模块包含可实现动态环境下实时定位的功耗较大的GPS模块CNS50-GPS和U-BLOX公司的车载民用功耗较低的GPS模块MAX-6Q。其中CNS50-GPS功耗达到1 W,MAX-6Q功耗只有数十毫瓦。无线信标发射机工作时,在下落的动态过程中使用CNS50-GPS模块,落地之后则使用MAX-6Q模块。通过CPLD芯片对两路信号进行串口分配,可解决C8051F040串口不足的问题。GPS模块在正常测试情况下,CNS50-GPS模块输出一连串二进制数字。在定位成功情况下,MAX-6Q输出结果如图6所示,为了降低传输数据量,系统去除了多余的数据。
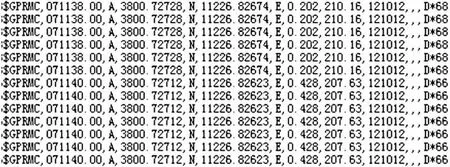
图6 GPS模块搜星成功输出信息
3.2 CNS50-GPS模块测试
对于CNS50-GPS模块,在地面设置两接收端,分别位于起飞点和飞机飞行的最远点,将两路GPS导航接收模块置于无人机上,为了区分两种模块采集的数据,本文分别命名不同的名字:天上回收的数据和地面GPS接收数据,运用在两种数据每个字节之前分别添加不同标记的办法。天上回收数据每个字节之前加“FA AF”,地面GPS接收数据每个字节之前加“EB BE”。对于每个数据帧结构,天上回收数据帧头为“FA AF AA FA AF EB”,地面GPS接收数据帧头为“EB BE 55 EB BE 90”,则采集的原始信息数据如图7所示。
上面的原始数据可以比较明确的判断两路GPS模块发射的信号,通过两路GPS模块获取的经纬度信息对比可以得到更精确的位置信息。上位机软件同时可以实时显示接收的数据,并把数据换算成地面与地图匹配,上位机地图软件如图8所示。
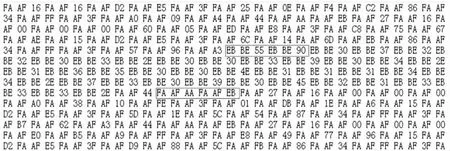
图7 接收的两路原始数据格式
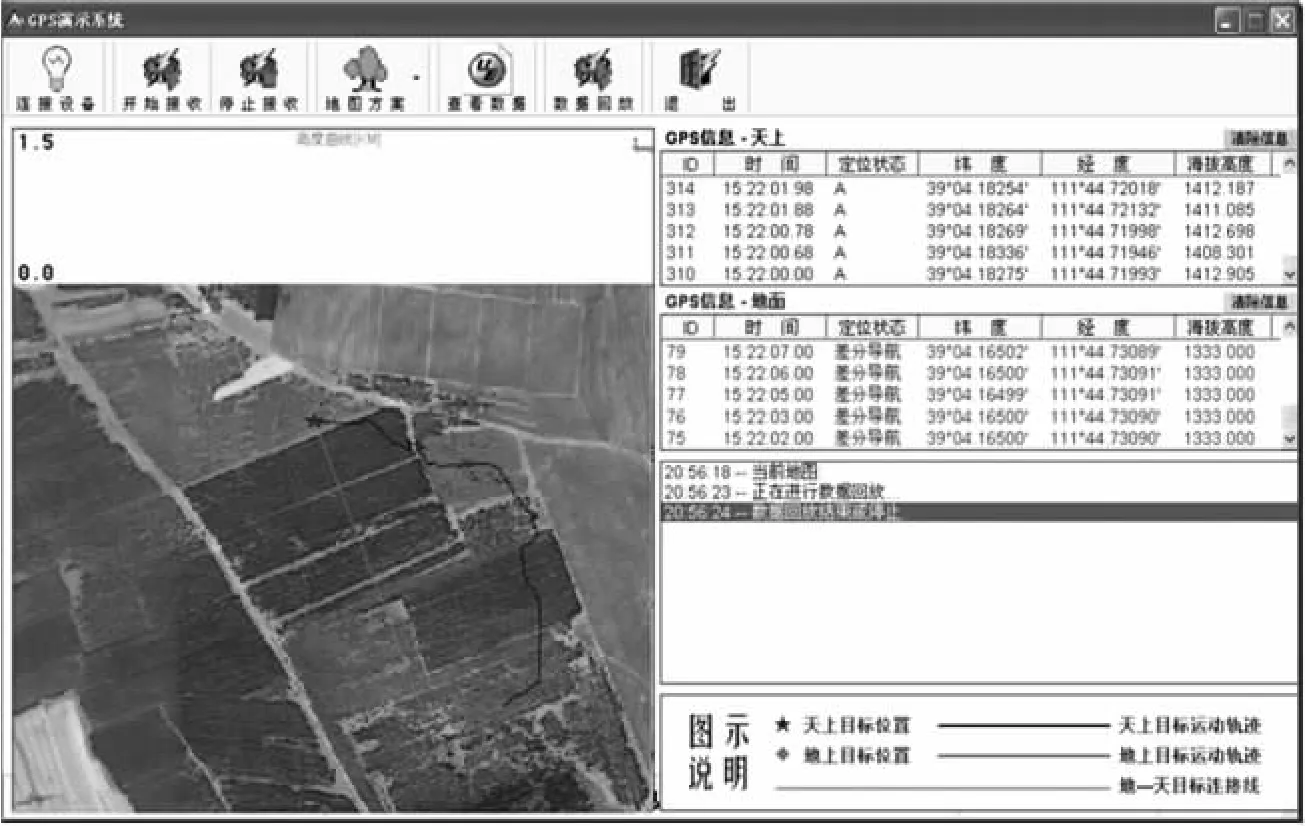
图8 上位机地图软件
4 结论
本文针对搜索技术,根据动态环境采用了一些新的设计和想法,提出地面搜索和天上无人机搜索联合搜索的方案,可大大提高搜索成功率。对系统进行了空中、平地和山区等各种条件的实验,通过对实验结果分析,系统稳定可靠,在快速移动的物体上面,GPS数据更新率能够满足试验要求,根据更新位置点连接成线,描绘出了物体的运动轨迹,达到了快速回收数据记录器的目的。
参考文献:
[1]李俊.调制方式的无线信标机关键技术研究[D].中北大学,2012.
[2]于铁军,刘文怡,王红亮.GPS信标机系统的设计与实现[J].电子器件,2014,37(4):690-694.
[3]刘建伟,裴东兴,尤文斌,等.回收式固态弹载记录仪抗高冲击设计[J].传感技术学报,2012,25(8):1045-1048.
[4]杨昂.高动态环境下多普勒频移估计技术研究[D].西安电子科技大学,2011.
[5]李金力.箭载数据存储器回收系统关键技术研究[D].2010.
[6]上海无线电设备研究所.个人便携式信标机[P].专利申请.2011.
[7]卢长晓.微小型无线信标机系统设计[D].中北大学,2009.
[8]钱德俊,张哲,胡晨.NEMA 0183协议解析[J].电子器件,2007,30(2):698-701.
曹翱翔(1989-),男,汉族,安徽肥东人,中北大学在读研究生,研究方向为测试计量技术及仪器,caoaoxiang@qq.com;

刘文怡(1970-),男,汉族,山西岚县人,中北大学教授,研究领域为测试计量技术及仪器,122631168@qq.com。
Information Receiving and Switching Wireless Beacon Designed Based on Two-Way GPS*
Zheng Junhua1,2,Tan Qiulin1,2*,Qin Xiaolong1,2
(1.Science and Technology on Electronic Test&Measurement Laboratory,North University of China,Taiyuan 030051,China;
2.Key laboratory of Instrumentation Science&Dynamic Measurement,North University of China,Ministry of Education,Taiyuan 030051,China)
Abstract:Through the research of the application and development of the current beacon on the domestic and international,a kind of radio beacon was designed based on two GPS information received and switching.The switching control circuit uses C8051F040 chip as the main chip to control two-way GPS module thus for increasing the wirless beacon working time,improve accuracy and reduce power consumption.Experimentally measured the UTC time 11:37:30,latitude 38.013 6°east,longitude 112.446,altitude of 815.9 meters.The results showed that the system can achieve and receive location information and display through the PC.
Key words:circuit and system; beacon design; wireless communication; two-way GPS; low power consumption
doi:EEACC:722010.3969/j.issn.1005-9490.2015.04.030
收稿日期:2014-08-27修改日期:2014-09-28
中图分类号:TP274.2
文献标识码:A
文章编号:1005-9490(2015)04-0858-05
猜你喜欢
电子制作(2019年16期)2019-09-27
电子制作(2019年23期)2019-02-23
厦门理工学院学报(2016年1期)2016-12-01
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
电子设计工程(2014年19期)2014-02-27
