
基于模糊控制的电动汽车再生制动系统的研究*
2015-02-23 08:28张克玲钱祥忠
电子器件 2015年4期
张克玲,钱祥忠
(温州大学物理与电子信息工程学院,浙江温州32503)
基于模糊控制的电动汽车再生制动系统的研究*
张克玲,钱祥忠*
(温州大学物理与电子信息工程学院,浙江温州32503)
摘要:为了实现在具有良好的刹车性能的前提下,降低能源的消耗量和延长电动汽车的行驶里程,论文提出了一种新颖的再生制动控制系统。该系统基于无刷直流电机的控制特性和电动汽车刹车时的制动特性,直流无刷电机采用传统的PID控制,刹车力采用模糊逻辑控制,刹车力矩由PID控制器实控制。通过MATLAB/Simulink软件,仿真分析了电池的充电状态、制动力和直流侧线电流。实验和仿真结果验证了方法的有效性。
关键词:电动汽车;再生制动系统;模糊控制; PID控制;无刷直流电机
由于受到资源环境的制约,电动汽车代替传统的汽车将是一个不可逆转的趋势[1]。随着电池和电机技术的发展,电动机将会取代内燃机[2-5]。此外,电动汽车自带电池,它可以通过标准的功率系统进行充电[4]。由于电动汽车的特点,即使电动机不比内燃机好,在电动汽车上电动机也会取代内燃机。再生制动系统可以用于电动汽车上,但是不可以用于内燃机上。
再生制动系统的工作原理是当外界使电机处于发电模式时,即汽车刹车时,再生制动系统可以将能量从电机处反馈到电池里。此时,电池就可以看为负载,因此可以从中获得刹车力[6-7]。相对于那些没有使用再生刹车系统的电动汽车,使用了再生刹车系统的电动汽车的行驶里程可以提高15%[3]。当电池电量为最大值时,再生刹车系统将会被停用。这个时候刹车的能量将会通过电阻负载消耗掉。因此,在电动汽车上,机械刹车系统也是保留的。此外,机械刹车系统可以在非常情况下确保汽车的安全[6,8]。这两个系统可以通过一个简单的踏板进行控制[9]。
1 电机和控制
由于无刷直流电机的特性,它非常适用于电动汽车。无刷直流电机一个典型的同步电机,其定子和转子产生的磁场的频率是一样的,永磁部分固定在转子上,而绕组则处于定子上,转子的位置通过霍尔传感器或者通过绕线的EMF测量得到[2,10]。电刷的控制采用典型的H桥如图1所示。无刷直流电机的电压空间矢量可以被划分为6个扇区,与霍尔传感器的6个状态一一对应。每相绕组产生反电动势[11]如图2所示。MOSFET和IGBT是最常用的驱动开关器件[12]。
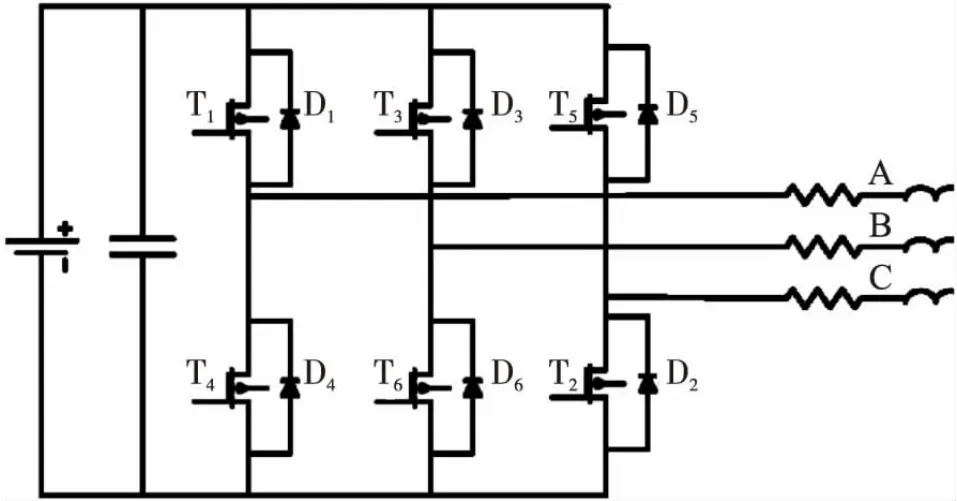
图1 H桥逆变电路
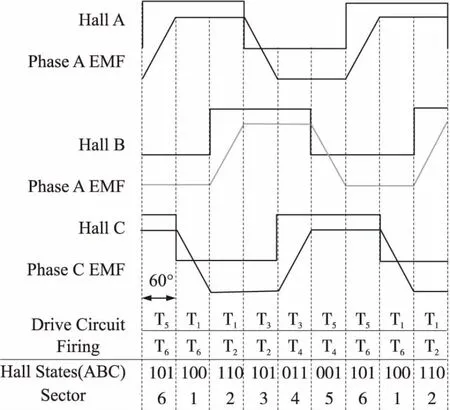
图2 无刷直流电机绕组反电动势
1.1再生系统的MOSFET控制
在刹车时电动机处于发电状态,电流逆向流入电池从而实现再生制动。在合适的开关状态下,通过如图2所示的电路可以将其实现。一个简单有效的方法是通过脉冲宽度调制(PWM)的方法的独立的开关它们从而实现高效的刹车控制[4]。然而,在无刷直流电机低速运行时,绕线的反电动势较低。这时不能实现充电功能。由于绕线电感的存在,电机的电感可以构成一个升压电路系统。当电压经过该电感升压器时可以实现能量回馈。图3显示了反电动势,绕线电流和控制双向DC/AC转化器的开关信号之间的关系。这里,在每个开关状态下只有一个开关的状态发生了变化。每个开关状态[13]的等效电路图如图4所示。

图3 单个开关状态下再生刹车情况
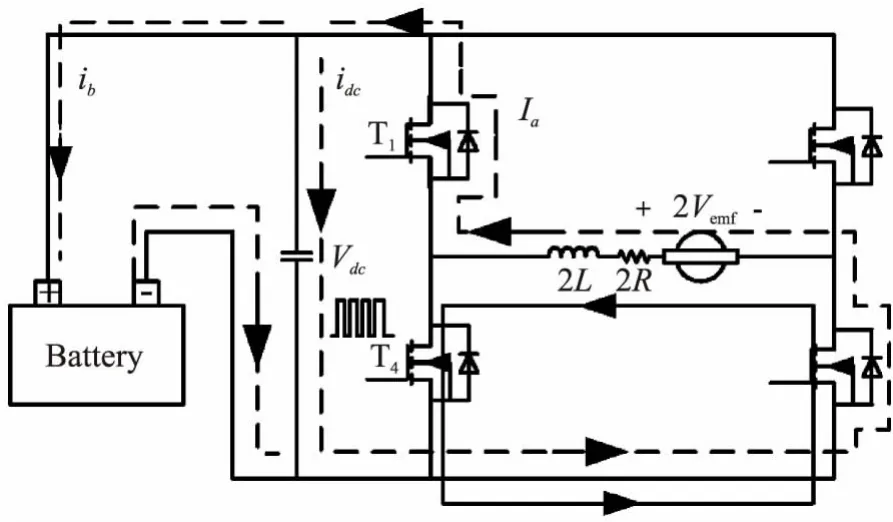
图4 一个开关状态下的等效电路图
2 再生自动系统
2.1控制结构图
整个系统的控制结构如图5所示。通过踏板传感器,我们可以获得所需的刹车力。根据前后轮刹车力的分布调节,前后轮的刹车力可以计算出来。经过模糊控制器,我们可以得到再生制动力的大小数值。然后,可以得到前轮的刹车制动力、再生刹车制动力和后轮的刹车制动力[14-15]。最后,通过方程(1),整个刹车力可以用电流表示。
这里,刹车电流Icom正比于刹车力Freg。k1是一个比例因子[16]。
2.2模糊控制
在具有再生系统的电动汽车中,刹车力的分布受到诸多因素的影响。通常模糊控制对再生系统具有很好的控制效果。模糊控制的3个输入量分别是电动汽车后轮刹车力,速度和电池充电状态[17-19]。

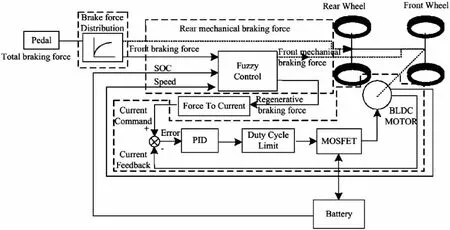
图5 系统控制结构图
(1)输入变量后轮刹车力。刹车力的大小在一定程度上代表刹车距离和刹车时间的要求。论域设置为[0,2000],模糊控制的隶属函数如图6(a)所示。电池充电状态:当电池的充电量小于10%时,电池的内部电阻值将会很大。这个时候不适合充电。这个时候刹车力的大小应该成比例的减小。当电池的电量在10%到90%之间时,电池可以通过大电流充电。这个时候再生制动力也应该成比例的增加。当当电池的电量在90%以上时,充电电流应该减小以防止过充的情况出现。这个时候刹车力的大小也应该减小。电池的充电状态可以设置为低、中、高3种状态。论域设置为[0,1],该隶属函数如图6(b)所示。对速度而言,当速度较低时,为了确保刹车安全和遵守交通规则,这个时候刹车力的大小应该成处于小比例的区域;当速度处于中间大小时,刹车力也应该增加;当处于高速时,再生刹车力的比值应该处于最大值。我们期望速度设置是低速和高速。整个论域设置成[0,500],它的隶属函数如图6(c)所示。

图6 模糊控制隶属函数
(2)输出变量我们采用mandani型的模糊控制方式。在后轮刹车力上,输出变量是一个比值,它正比于再生刹车力。该比值={MF0,MF1,MF2,MF3,MF4,MF5,MF6,MF7,MF8,MF9,MF10} ={0,0.1,0.2,0.3,0.4,0.5,0.6,0.7,0.8,0.9,1.0}。该隶属函数如图6(d)所示。
(3)控制规则刹车力表示为L,M,H,电池充电状态表示为L,M,H,速度是L,H,其规则如表1所示。
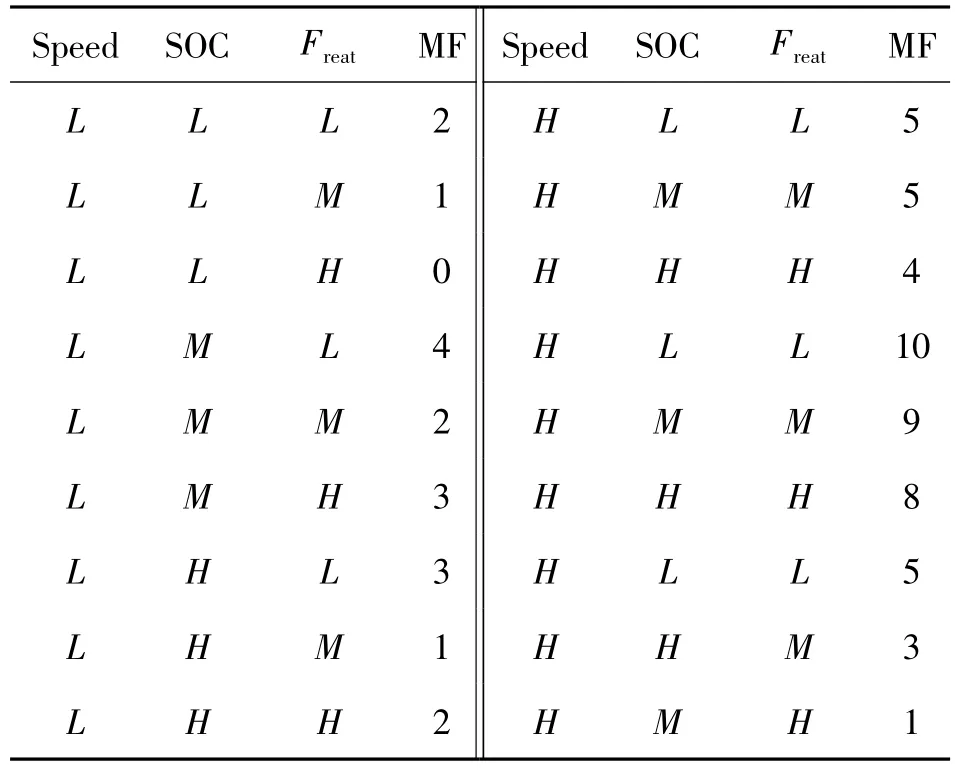
表1 模糊控制规则
(4)PID控制PID控制主要用于确保刹车力的恒定。可以通过不同的PWM来获取不同的刹车力。PID控制器通过调节PWM来控制刹车力的恒定。在模糊推理时,刹车力可以保持为定值。由于模糊控制的速度远小于PID的响应速度,因此,刹车力矩可以通过PID控制器实时的控制[20]。
3 仿真与实验
通过MATLAB/Simulink软件建立系统模型,并使用该软件进行仿真测试。我们根据市内交通情况进行仿真,仿真结果如下。
3.1模拟电动汽车的速度曲线
电动汽车的速度曲线有3个加速部分,4个减速部分和两个停止状态构成,如图7所示。

图7 电动汽车的速度曲线
3.2刹车力的分布
刹车力的分布如图8所示:从中我们可以看到,后轮的机械刹车力远远小于再生系统的刹车力。
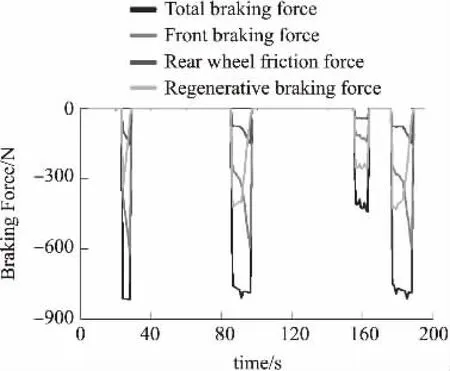
图8 制动力的分布
在减速时,后轮的刹车力主要由电动汽车的再生系统产生。速度越高,再生系统获得的比例越高。这说明再生刹车系统更适用于高速情况。
4 能源回收效率
在汽车的运行期间,有4个阶段能够使回收能源。如图9所示,回收率是50%。但是该回收率和汽车的速度,交通情况,电池充电状态和驾驶人员的习惯等因素有关。

图9 制动时,能源回收情况
5 无刷直流电机直流侧电流曲线
如图10所示:无刷直流电机直流侧电流和速度有关。当电动汽车刹车时,再生制动系统能够通过PID控制器控制无刷直流电机的电流,从而确保刹车力矩的恒定。PID控制器通过调节PWM来实现对无刷直流电机的控制。
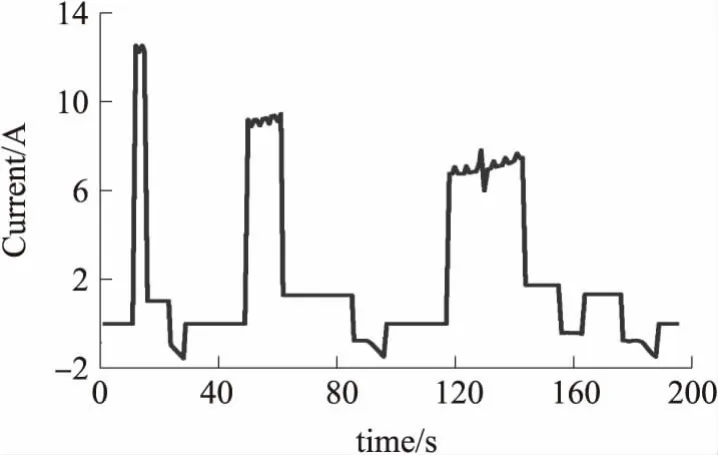
图10 PID控制作用下,无刷直流电机的电流曲线
6 电池的充电状态
如图11所示,在电动汽车的运行期间,相对于其他过程,加速度期间将会消耗更多的能量。在刹车时,电池的能量有所回升。这表明再生制动系统发挥了作用。
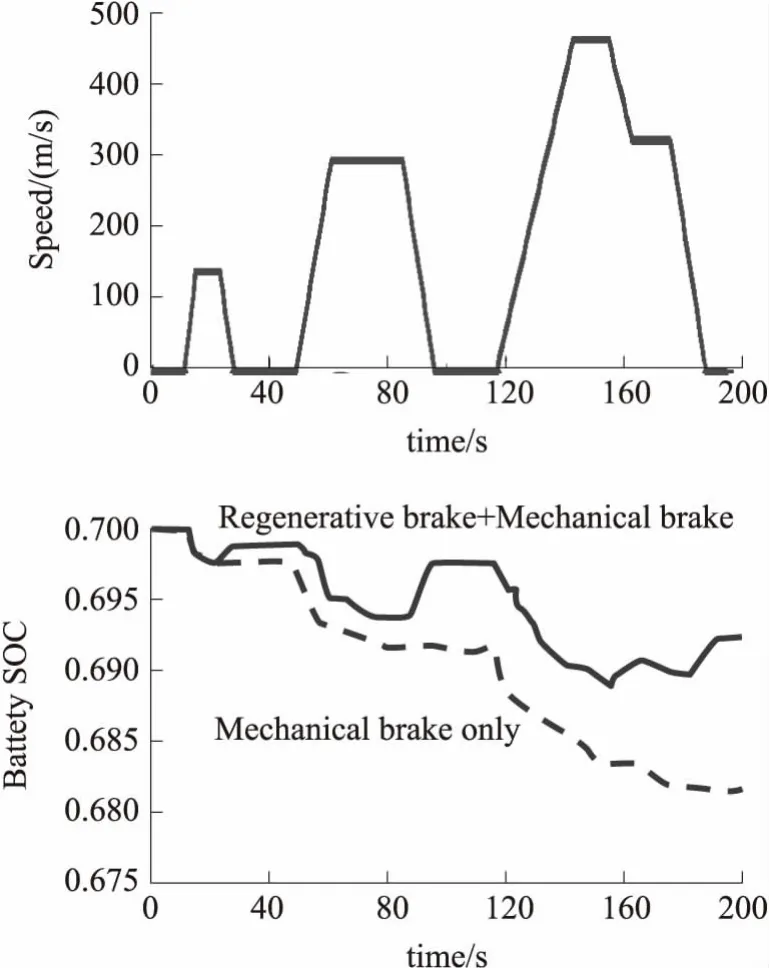
图11 电池的充电状态
实验测试系统的控制芯片为TMS320F2812,控制电机参数如表2所示。本系统采用TMS320F2812为控制芯片。控制电机参数如表2所示。
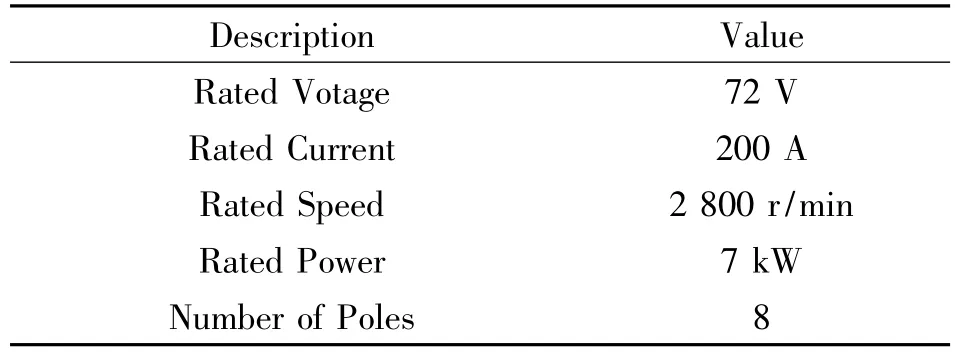
表2 电机参数
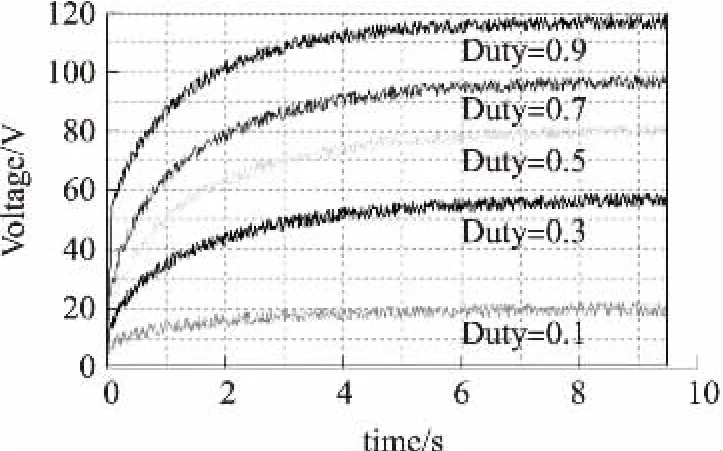
图12 转速相同,PWM不同情况下直流侧电压值变化曲线
将电机的速度控制为固定值,通过调节PWM的占空比可以获得不同的反电动势,如图12所示。同理,在不同的转速下,同样可以通过调节PWM来获得不同的电压,如图13所示,当速度为60 km/h。通过调节PWM占空比,直流侧电压可以达到甚至超过额定值,当速度为30 km/h时,50%的PMW占空比,就能够是电压达到额定值。如果增大PWM的占空比(可以调节达到70%),对应的直流侧电压可以达到更大。电压变化曲线如图13所示。
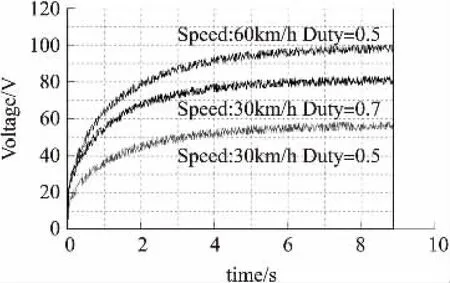
图13 相同速度下,直流侧电压变化曲线
图14显示的是在制动时,电压、电流和速度变化曲线。当电动汽车的速度由70 km/h下降到30 km/s时,在再生自动时,直流侧电压可以保持为较大值。当速度过低时,电动汽车将会有机械刹车系统自动。同时,在速度为0的情况下,直流侧电流也为0。

图14 制动时,电压、电流和速度变化曲线
4 结论
论文讲述的是基于无刷直流电机的电动汽车的再生制动系统。仿真和实验验证了论文中提出的控制方法的有效性。通过将模糊控制和PID控制相结合,该再生制动系统能够动态的调节机械刹车力和电动刹车力。PID控制在电动汽车上使用比较广泛。但是要想精确的控制制动电流还是比较困难的。刹车力受到电池充电状态、速度、刹车强度等诸多因素的影响。本文选取3个影响最大的因素——电池充电状态、速度、刹车强度,作为模糊控制器的输入。我们发现通过合适的控制刹车电流可以产生期望的制动力矩。同时,通过PID控制器控制PWM的占空比可以获得恒定的制动力矩。PID控制的响应速度比模糊控制要快的多。因此,两种方法的配合使用可以震荡过程更加平滑。仿真和实验结果有效的证实了该再生制动系统能够在不同的运行状况下有效的回收能源和实现电动汽车的安全制动。
参考文献:
[1]Reuters,(2010.Oct,16),China Electric Vehicles to Hit 1 Million by 2020:Report[Online].Available:http://www.reuters.com/article/2010/10/16/retireus-autos-china-idUSTRE69F0J820101016.
[2]程琤,刘兆瑜,李辉.无刷直流电机转子状态估计研究[J].电子器件,2007,30(4):1467-1468.
[3]Emadi A.Handbook of Automotive Power Electronics and Motor Drives[M].Boca Raton,FL:CRC Press,2005:21-55.
[4]Ford R.Regenerative Braking Boosts Green Credentials.Railway gazette,June 2007,163(7):430-431.
[5]Krishnan R,Sung-Yeul Park,Keunsoo Ha.Theory and Operation of a Four-Quadrant Switched Reluctance Motor Drive with a Single Controllable Switch The Lowest Cost Four-Quadrant Brushless Motor Drive[J].IEEE Trans Ind App,2005,41(4):1047-1055.
[6]Grbovi P J,Delarue C P,le Moigne P,et al.A Bidirectional Three-Level Dede Converter for the Ultra-Capacitor Applications[J].IEEE Trans Ind Electron,2010,57(10):3415-3430.
[7]Peng D,Zhang J,Yin C.Regenerative Braking Control System Improvement for Parallel Hybrid Electric Behicle[C]//Technology and Innovation Conference,2006,ITIC 2006 International,2006:1902-1908.
[8]Wang F,Yin X,Lou H,et al.A Series Regenerative Braking Control Strategy Based on Hybrid-Power[C]//2012 International Conference on Computer Distributed Control and Intelligent Environmental Monitoring,2012:65-69.
[9]Mutoh N,Nakano Y,Dynamics of Front-and-Rear-Wheel-Independent-Drive-Type Electric Vehicles at the Time of Failure[J].IEEE Trans Ind Electron,2012,59(3):1488-1499.
[10]Halo I P T.The Future of Electric Vehicles:Wireless Charging for Electric Vehicles[EB/OL].Available:http://www.haloipt.com.
[11]Cheng M,Hua W,Zhang J,et al.Overview of Stator-Permanent Magnet Brushless Machines[J].IEEE Trans Ind Electron,2011,58(11):5087-5101.
[12]Wang Y,Deng Z.Hybrid Excitation Topologies and Control Strategies of Stator Permanent Magnet Machines for DC Power System [J].IEEE Trans Ind Electron,2012,59(12):4601-4616.
[13]Sheeba Joice C,Paranjothi S R,Senthil Kumar V J.Digital Control Strategy for Four Quadrant Operation of Three Phase BLDC Motor with Load Variations[J].IEEE Trans Ind Inform,2012(5):5-10.
[14]Sathyan A,Milivojevic N,Lee Y J,et al.An FPGA-Based Novel Digital Pwm Control Scheme for BLDC Motor Drives[J].IEEE Trans Ind Electron,2009,56(8):3040-3049.
[15]Keskar N,Batello M,Guerra A,et al.Power Loss Estimation in BLDC Motor Drives Using iCals.Application Notes International Rectifier,AN-1048,Feb.2010.
[16]Yoong K,Gan Y H,Gan G D,et al.Studies of Regenerative Braking in Electric vehicle[C]//Proceedings of the 2010 IEEE Conference on Sustainable Utilization and Development in Engineering and Technology,00.40-41,20-21,Nov,2010:40-41.
[17]Yang J M J,Jhou H L,Ma B Y,et al.A Cost—Effective Method of Electric Brake with Energy Regeneration for Electric Vehicles[J].IEEE Trans Ind Electron,2009,56(6):2203-2212.
[18]Huang C H,Wang W J,Chiu C H.Design and Implementation of Fuzzy Control on a Two Wheel Inverted Pendulum[J].IEEE Trans Ind Electron,2011,58(7):2988-3001.
[19]Cao J,Cao B.Fuzzy Logic Based Sliding Mode Controller Design for Position Sensorless Electric Vehicle[J].IEEE Trans Power E-lectron,2009,24(10):2368-2378.
[20]伍筱菁.基于改进遗传算法寻优的神经网络PID控制及应用[J].2006,19(3):866-867.
[21]NF K,Xhnf F,Li N S.PIS Control System Analysis,Design and Technology[J].IEEE Trans,Control syst Tech,2005,12:559-576.

张克玲(1989-),女,汉族,山东临沂人,硕士研究生,主要从事电气传动及其智能控制,电动汽车充放电系统设计及仿真等方面的研究,keling2163@163.com;
Military Air Combat Communication Anti-Jamming Methods Based on Harr-SCML*
MIAO Yingkai*
(Puyang Vocational and Technical College,Puyang Henan 457000,China)
Abstract:Due to the specific interference such as the electromagnetic wave of enemy,such wave can cause signalto-noise to reduce military communication signals.A kind of learning algorithm based on Harr wavelet and strong military air classifier machine is proposed for use as communication anti-jamming methods.The communication antijamming model has been estahlished for judging the communication waveform in the kinds of feature points; samples are classified by using Harr feature classfier.This samples for Harr characteristics,using decision tree algorithm for training,and to be able to gradually train are classified eventually to make military communication perform accurately.Experimental results show that the improved method can obtain accurate communication signals,bit error rate was reduced by 45% than that of the traditional methods.
Key words:strong classifier machine learning; the air combat; Harr wavelet; anti-interference
doi:EEACC:7930; 797010.3969/j.issn.1005-9490.2015.04.033
收稿日期:2014-09-10修改日期:2014-10-23
中图分类号:U469.72
文献标识码:A
文章编号:1005-9490(2015)04-0876-06
项目来源:浙江省重点科技创新团队项目(2012R10006-12)
猜你喜欢
山东工业技术(2016年23期)2016-12-23
电子技术与软件工程(2016年20期)2016-12-21
科学与财富(2016年26期)2016-12-01
企业技术开发·中旬刊(2016年10期)2016-11-12
电脑知识与技术(2016年17期)2016-07-23
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
物联网技术(2015年12期)2015-12-28
电源技术(2015年11期)2015-08-22
