
基于点云配准的工业测量技术研究*
2015-02-23 08:28秦品乐刘毛毛陈晓青
电子器件 2015年4期
常 江,秦品乐*,刘毛毛,陈晓青,张 斌
(1.中北大学计算机与控制工程学院,太原030051; 2.中北大学经济与管理学院,太原030051)
基于点云配准的工业测量技术研究*
常江1,秦品乐1*,刘毛毛1,陈晓青1,张斌2
(1.中北大学计算机与控制工程学院,太原030051; 2.中北大学经济与管理学院,太原030051)
摘要:对待测产品的测量点云和标准设计点云进行配准,得出产品制造偏差量,进行精度测量评定。先采用主元分析(PCA)法作预匹配,再用随机抽样(RANSAC)算法取重合度高的匹配点对,最后利用最近点迭代(ICP)算法得到高精度的点云配准。其中,采用RANSAC算法得到高重合度的匹配点对,便于得出最优空间坐标转换参数,使得配准精度更高;对抽样次数的估计可以推出点云配准迭代次数,进而有效减少运算时间。实验结果显示算法是有效的。
关键词:产品制造;精度测量;主元分析法;随机抽样法;最近点迭代
在现代制造工业中,高精度的制作精度是保证高质量和高效率的产品制造的方法之一。因为目前我国精度控制技术的不足,使工业产品标准不是很高。而通过点云配准的方式可以提供对精度控制的预测和把握,因此对基于点云匹配的工业测量精度评价技术的研究有着重要意义[1-2]。
国内外许多学者已经加入了对点云匹配算法的研究,并提出了一些匹配算法,总体来说分为几何特征匹配(如PCA法,基于内特征匹配)[3-4]和基于优化的调节匹配(如最常用的ICP法,欧拉旋转理论)[5-7]。
1 改进的精度测量方法
文献[1]提出了把点云配准应用在了船体制作误差评价中,总体效果不错,但是在精度方面还有待提高。本文在把点云配准的一些算法在此应用上进行了一些改进,并且引用RANSAC算法来保证选精确匹配点对的选取,有效增强了点云配准的准确性,提高了数据总体精度[8-10]。
1.1改进的精度测量方法流程图
首先使用PCA分析待匹配两点云中数据点的分布特征,求得点云的主要分布规律和方向,得两点云初始匹配,其中求坐标转化参数时用到了SVD求解。其次求ICP距离均方差,是否小于设定阈值[11-13]。若达不到设定阈值,则利用RANSAC选择内点,重复上述过程,直到达到所要求阈值为止。

图1 改进的精度测量方法流程
1.2点云坐标归一
1.2.1主元分析算法
通过主元分析(PCA)算法分析两点云数据点的分布特征,求得两点云的主要分布规律和方向。把两点云数据看成两个矩阵,通过求坐标3个方向的变量均值则可以得点云的质心,即坐标轴原点。计算两点云的协方差矩阵,则可以求得各自的特征向量。实对称矩阵的特征向量两两垂直,作为空间坐标系XYZ轴。把两特征向量矩阵参与计算,即可两点云的的坐标转换矩阵。
基于PCA的初次匹配具体过程如下:
(1)分别构造标准设计点云矩阵和测量点云矩阵:
标准设计点云矩阵
测量点云矩阵
(3)分别对两点云求协方差矩阵:
标准设计点云协方差矩阵:
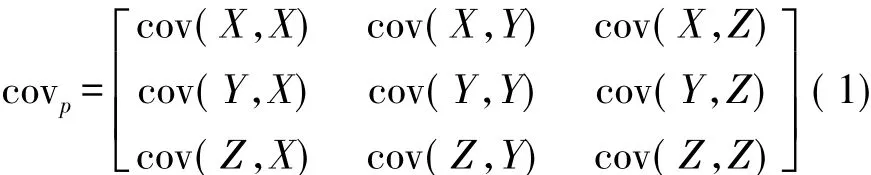
测量点云协方差矩阵:

式中:X,Y,Z为标准设计点云矩阵的3个列向量。同理X',Y',Z'。
(4)求上述协方差矩阵的特征向量和特征值,按特征值的从大到小对应的特征向量构成向量矩阵,分别为矩阵T1和矩阵T2。

式中:T表示平移矩阵,R表示旋转矩阵。
(5)设点qi表示测量点云Q中的点,点q'i表示点qi转换到标准设计点云所在空间坐标系下的点。公式表示如下:

把测量点云中的点坐标通过转换矩阵,转换到标准设计点云所在空间坐标系下,初始坐标归一化完毕。
1.2.2奇异值分解法
矩阵奇异值分解法SVD(Singular Value Decomposition)是线性代数中重要的分解方法。在阈值的求解中,建立采用SVD算法求解。
(1)设两三维点云分别表示为{ Pi}和{ Qi}。
(2)利用{ Pi}和{ Qi}构成3×3协方差矩阵M:
式中:矩阵D为对角阵,D = diag(di),d1≥d2≥d3≥0。
1.3改进的ICP算法
ICP算法是对点云精确匹配的常用算法,本质上是基于最小二乘法求最优的点云配准[14-15]。该算法在求点云矩阵转换参数时必须达到正确匹配的收敛精度要求,以至于需要重复选择对应点对。当坐标转换后的点对的最近点迭代均方差小于设定阈值则表示达到预期效果。即当两点云对齐配准转换达到目标函数最小,则配准效果最优。目标函数表示如下:

式中:Pi表示标准设计点云的点,Qi表示测量点云中的点,T·R表示空间坐标轴变换矩阵,则阈值设定为f(T·R)=ξ(ξ表示一个小值)。
本文引用的RANSAC算法是选择精确匹配点对,进而求得最佳坐标转换参数的算法。RANSAC算法中最佳的点对称之为内点,其他点对为外点。该算法的原理是:通过对两点云坐标归一化后点集的误差进行分析,其中有匹配度高的点对,也有匹配度低的点对。在匹配度高的点对中随机选取m个点对(这里最少3个点对就可以得到坐标转换参数,但越多的好匹配点对会使全局点云的最佳匹配越有益),通过运算来检验是否为最佳转换参数,确定所选内点。
根据概率论,设匹配度高的点对概率为ε,若n

式中:w为内点概率。
用估计抽样次数设定阈值可以减少ICP算法无效的迭代,使结果更惊奇。而使用RANSAC算法,以提取内点的形式,选取出了精确的对应点对,使坐标归一化的过程更加精确。对匹配度高的点对存在m个目标点,则ε=m/n,不同情况下ε的值会不同,可根据经验确定。
在N次抽样中有一次好样本的概率为:

估计抽样次数为:
2 应用实例及分析
2.1实例1:船体分段点云配准
文献[1]是通过点云匹配对分段船体建造误差进行分析,本文是通过点云匹配来评价工业上的建造误差。实例1中通过本文算法与文献[1]的算法对文献[1]的数据进行误差分析,来表明本文算法在精度上的提高。
此分段共取了52个精度管理点,表1为标准设计点云模型坐标。表2为对分段船体的测量坐标。表3为以文献[1]的算法对测量点云在坐标归一后的点坐标。表4表示本文算法进行坐标归一后点的坐标。(以表1中都选取前面5个点列出,并只写出小数点后4位)。
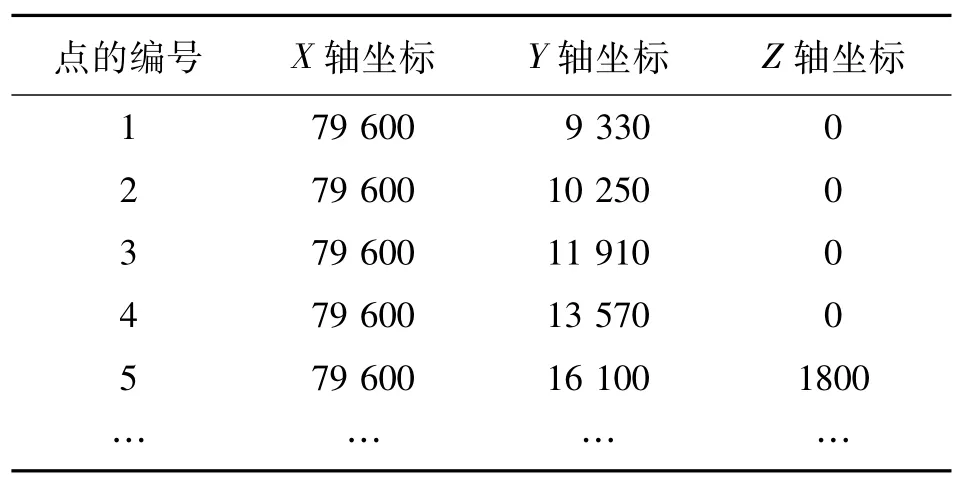
表1 标准设计点云模型坐标

表2 分段船体的测量坐标
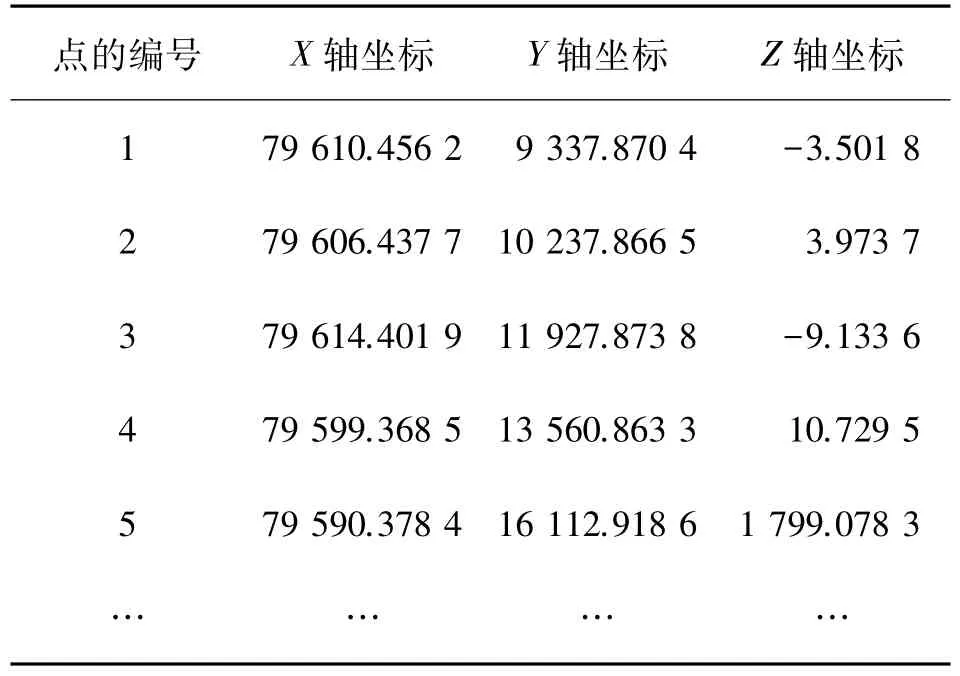
表3 文献[1]算法下得到的点云坐标
为了表达本文算法优越性,分别通过对匹配点对在X轴方向、Y轴方向、Z轴方向和相对距离等4个方面的点对匹配误差进行比较,结果如图2所示。
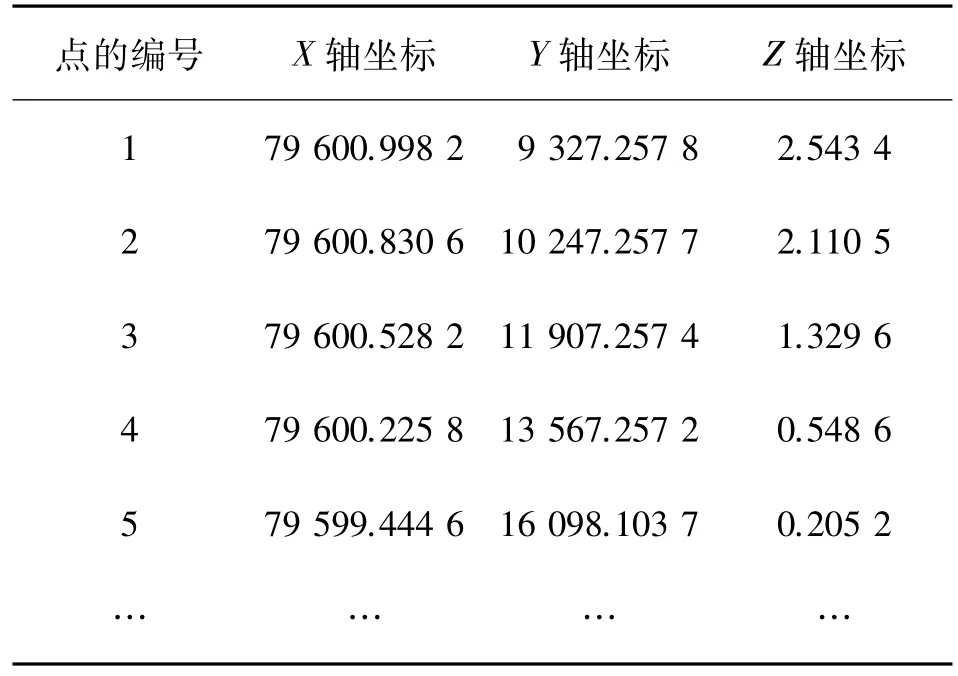
表4 本文算法下得到的点云坐标
以上结果显示,本文算法在测量精度上有了很大提高,误差都约束在了比文献[1]的误差更小的范围内。

图2 点云配准误差精度对比
2.2实例2:小型船只发动机点云配准
使用本文算法可以有效的对标准设计点云和测量点云进行配准,图3(a)的纵向发动机点云是标准设计点云,横向发动机点云是测量点云。图3(b)为基于文献[1]的算法进行的配准的结果。在图3(c)为通过本文算法得到的配准结果。
以上结果更直观的显示本文算法的准确性和高效性,有效的实现了工业测量精度评价中较高的点云配准精度,能够为后续分析工业产品的制作误差提供更加准确的指导。
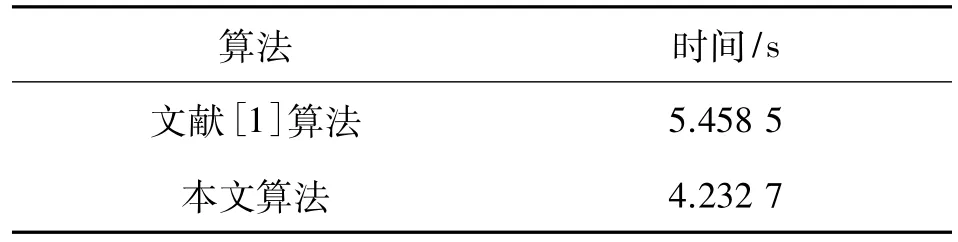
表5 小型船只发动机在不同算法下点云配准时间

图3 小型船只发动机点云配准效果图
3 结语
本文提出了一种基于点云配准的工业测量技术,可以有效的应用在工业精度控制方面。通过主元分析法进行标准设计点云与测量点云的自动匹配,又经过加入RANSAC算子的改进ICP算法进行点云配准,得到了很好的点云配准结果。实例中,通过对比文献[1]的算法表明了本文算法在工业精度测量方面具有自动化、准确性高的优越性,并且可以应用在其他行业的工业精度测量方面。
参考文献:
[1]管官,申玫,林焰.船体分段测量点数据与CAD模型自动匹配方法研究[J].哈尔滨工程大学学报,2012,33(5):581-584.
[2]王彦,崔一平.光纤激光器技术[J].电子器件,2004,27(2):342-347.
[3]陈卓,宋丽梅,陈昌曼,唐欢.同一物体不同视角的点云配准方法[J].天津工业大学学报,2014,33(1):45-49.
[4]Good R P,Kost D,Cherry G A.Introducing a Unified PCA Algorithm for Model Size Reduction[J].Semiconductor Manufacturing,IEEE Transactions,2010,23(2):201-209.
[5]杨现辉,王惠南.ICP算法在3D点云配准中的应用研究[J].计算机仿真,2010,27(8):235-238.
[6]戴静兰,陈志杨,叶修梓.ICP算法在点云配准中的应用[J].中国图象图形学报,2007,12(3):517-521.
[7]Paul J Bed,Neil D McKay.A Method for Registration of 3-D Shapes [J].IEEE Transactions on Pattern Analysis and Mechine Intelligence,1992,14(2):239-256.
[8]曹毓,冯莹,杨云涛.RANSAC平面估计算法在路面物体体积测量中的应用[J].传感技术学报,2012,25(3):413-416.
[9]Chrysi Papalazaroua,Peter H N de Witha,Peter Rongenb.Sparse-Plus-Dense-RANSAC for Estimation of Multiple Complex Curvilinear Models in 2D and 3D[J].Pattern Recognition,2013,46(3):925-935.
[10]Zhou Fuqiang,Cui Yi,Wang Yexin.Accurate and Robust Estimation of Camera Parameters Using RANSAC[J].Optics and Lasers in Engineering,2013,51(3):197-212.
[11]刘瑞祯,谭铁牛.基于奇异值分解的数字图像水印方法[J].电子学报,2001,29(2):1-4.
[12]管官,申玫,林焰.考虑工程约束的船体分段测量点集匹配方法[J].哈尔滨工程大学学报,2013,34(5):541-548.
[13]Fukushima A,Wada M,Kanava S.SVD-Based Anatomy of Gene Expressions for Correlation Anlysis in Arabidopsis Thaliana[J].DNA Research,2008,16(6):367-374.
[14]朱延娟,周来水,张丽艳.散乱点云数据配准算法[J].计算机辅助设计与图形学学报,2006,18(4):475-481.
[15]薛耀红,梁学章,马婷.扫描点云的一种自动配准方法[J].计算机辅助设计与图形学学报,2011,23(2):223-231.

常 江(1989-),男,汉族,山西省晋中市人,中北大学研究生,主要从事基于点云匹配在工业测量中的应用研究,18735385197@163.com;

秦品乐(1978-),男,汉族,山西省长治市人,中北大学博士、副教授,主要从事基于视觉的嵌入式网络控制与跟踪技术,qpl@nuc.edu.cn。
Research on Combination of Internet and Broadcast Network
LI Yuefang*
(Changzhou Institute of Light Industry Technology,Department of Electronic and Electrical Engineering,Changzhou Jiangsu 213164,China)
Abstract:How to bring IP data service on the MPEG-2 broadcast network and AV-data on the Internet is studied.It applies the M/M/N queue mode to study the feasibility about bringing the VoD application in a typical city based on MPEG-2 broadcast network,and it carries out a mechanism about how to choose the network to transfer the data by considering the advantages of both networks and the character of transferred data.
Key words:combination of Internet and broadcast network; M/M/N queue mode; VoD(Video on Demand)application on the digital TV network
doi:EEACC:726010.3969/j.issn.1005-9490.2015.04.043
收稿日期:2014-08-20修改日期:2014-09-14
中图分类号:TP391.7
文献标识码:A
文章编号:1005-9490(2015)04-0929-06
项目来源:山西省青年基金项目(201002106-13)
