基于多阈值与像素点追踪的轨道识别
2015-02-27 05:59张兆阳陈琦玮汪一鸣
电子设计工程 2015年23期
强 祥,张兆阳,陈琦玮,吴 澄,汪一鸣
(1.苏州大学 城市轨道交通学院,江苏 苏州215000;2.苏州大学 电子信息学院,江苏 苏州215000)
基于多阈值与像素点追踪的轨道识别
强 祥1,张兆阳2,陈琦玮2,吴 澄1,汪一鸣1
(1.苏州大学 城市轨道交通学院,江苏 苏州215000;2.苏州大学 电子信息学院,江苏 苏州215000)
为了保证有轨电车营运系统的安全性和可靠性,快速检测有轨电车轨道之间及其周边是否存在障碍物并迅速做出反应成为一个值得研究的课题,而轨道的识别是障碍物检测的前提。结合有轨电车轨道的实际特征,提出基于多阈值与像素点追踪的轨道识别算法,采用多阈值的方法进行轨道区域分割,利用像素点追踪的方法进行轨道特征点的提取,选择合适的曲线模型构建轨道方程,从而实现对有轨电车直道和弯道铁轨的有效识别。
轨道识别;多阈值;像素点追踪;连通区域
现代有轨电车具备较快的行驶速度、较大的客运量和开放的运营环境,当有轨电车行驶速度、障碍物大小达到一定程度时,就会对行车安全造成极大威胁。即使行车速度较慢、障碍物较小时,列车与障碍物的碰撞也会对车身部件造成不良影响。因此,工程上对有轨电车系统安全性和可靠性提出了较高要求。常规的有轨电车障碍物检测主要依靠人工作业方式对路轨进行检测和维护,在车辆行进过程中由司机完成前方障碍物探测,车载监控设备仅为人工识别提供辅助。近年来基于图像视觉的智能处理方式,越来越多地被采用。它具备反应速度快、建设成本低和分类能力强等显著特点[1]。但在有轨电车障碍物检测中的运用尚不广泛。
实际获取的图像往往包含大量无关信息,对整幅图像的搜索会造成检测效率和准确度的降低,而障碍物检测真正感兴趣的区域是轨道之间及其周边区域。因此,轨道的准确提取显得尤为重要。目前,单独用于有轨电车或是高速铁路轨道识别的方法并不多见,但是与之类似的车道线检测的方法则较为成熟。现存的线状目标的提取方法分为基于模型的方法和基于特征的方法。基于模型的方法是利用先验知识对每一帧图像进行模型匹配,提取轨道线[2];基于特征的方法是利用轨道目标的亮度、色彩、纹理等信息来标识轨道区域。早期的轨道区域提取的文章大多使用阈值法或是边缘检测直接提取,常用的迭代阈值法和Otsu法[3]对于区域明显、背景简单的场景效果理想,但是复杂背景下检测效果较差[4]。边缘检测算子较多,通常采用Sobel和Canny边缘检测算子,这些算子对于复杂背景下的线形目标也难以准确提取,并且受经验阈值影响,导致算法稳定性差[5]。基于Hough变换的轨道提取方法对噪声和环境干扰有一定的抑制作用,对于直线上少数点的抖动,或是出现断裂和虚线的情况,仍能保持良好效果,但是当干扰增大或是线形为弯道情况,仍然无能为力[6]。
有轨电车运行在城市内部及其周边,与高速铁路轨道检测和公路车道线检测相比,存在以下难度1)复杂多变的背景;2)弯道、上下坡路段众多;3)高楼、电线杆、接触网造成的阴影严重。因此,具有较强抗干扰性的轨道识别算法是研究的关键。
1 基于多阈值的轨道区域分割方法
有轨电车运行在城市内部及其周边,轨道采用的是不同于高速铁路的凹形轨,如图1所示,从中观察发现存在以下特点:
1)凹形轨槽内较暗,槽外较亮,灰度差异明显;
2)较亮较暗部分直接相邻。

图1 有轨电车凹形轨道图Fig.1 Concave tram tracks
图2为凹形轨道的灰度截取图,利用图像处理软件获取较亮较暗部分灰度值,得到:
1)较亮部分灰度值集中在150左右,较暗部分灰度值集中在10左右;
2)较亮较暗部分临界区域梯度较大。

图2 凹形轨道截取图Fig.2 The interception of concave track
根据以上特点,文中提出一种基于多阈值的轨道区域分割方法,阈值法是利用相似性分割出相同阈值条件的区域,多阈值指分别利用槽内较暗灰度值和槽外较亮灰度值对原图进行两次阈值分割,再根据距离特征进一步分割轨道区域,减少环境干扰。具体步骤如下:
1)对采集到的原始图像进行预处理,主要包括灰度化和平滑滤波。
2)定义预处理后的灰度图像为f(x,y),利用先验知识确定槽内较暗区域灰度值TL和槽外较亮区域灰度值TH。由于受光线、摄像头拍摄角度的影响,轨道槽内外灰度值在一定范围内波动,槽内较暗区域二值化及槽外较亮区域二值化分别按公式(1)及公式(2)进行:
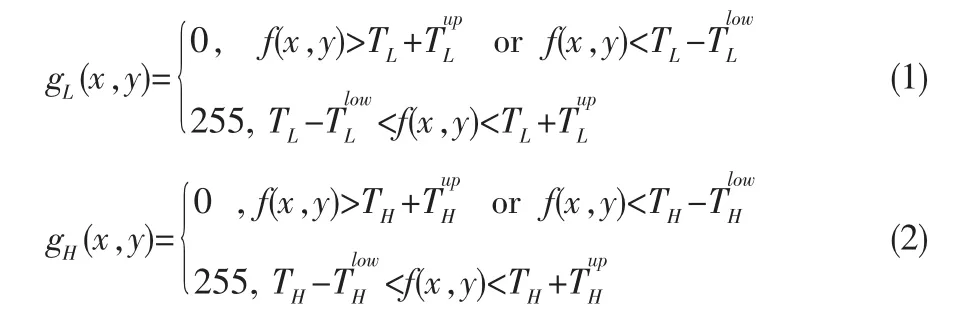
3)对较暗区域二值图gL(x,y)和较亮区域二值图gH(x,y)进行膨胀得到(x,y)和(x,y),形态学膨胀的目的是为了连接部分断裂的轨道区域和扩大槽内外区域的宽度,为提取临界区域做准备。膨胀结构元的宽度决定下一步gu(x,y)二值图中轨道区域的宽度。
4)对膨胀后的两幅二值图求交集,如公式(3),得到干扰大量减少轨道区域较为完整的区域分割二值图。

本方法与利用传统阈值法或边缘检测得到的区域分割二值图相比,在不影响轨道区域分割完整性的基础上能够减少背景干扰及环境噪声。图3为利用Canny边缘检测算子得到的轨道边缘检测二值图,图4为利用本文提出的基于多阈值的区域分割方法得到的轨道区域分割二值图,图4的背景干扰明显少于图3,更加利于下一步特征点的提取。

图3 边缘检测二值图Fig.3 Binary image for edge detection
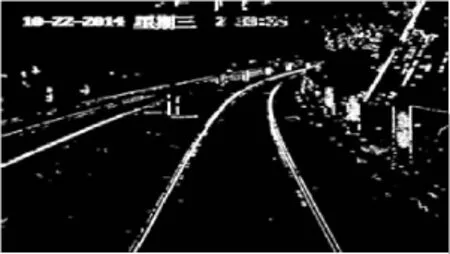
图4 多阈值分割二值图Fig.4 Binary image for multi-threshold segmentation
2 基于像素点追踪的轨道特征点提取方法
基于像素点追踪的轨道特征点提取方法指的是在边缘检测或阈值分割二值图的基础上,先根据某些严格的 “探测准则”找到属于目标物体上可能的像素,再根据这些像素的某些特征用一定的“跟踪准则”找到目标物体上的其它像素,最后利用一定的先验知识对干扰线段进行剔除[7]。像素点追踪的方法不受轨道走向、上下坡路段等情况的影响,更加符合有轨电车的实际运行情况,此处具有较强抗干扰性的探测准则和跟踪准则的制定是本研究的关键。
本文提出的像素追踪方法的探测准则是利用一定先验知识搜索轨道的起始点,跟踪准则是利用已经找到的点的位置及连通性结合骨架提取的思想找到轨道上的其它像素点,对提取出的多条轨迹线利用轨道线长度作为先验知识进行干扰
线段的剔除,最后采用最小二乘分段二次拟合的方法构造轨道方程。具体流程如下:
1)在gu(x,y)上确定两侧轨道可能的起始点xLn,xRmn,m= 1,2,3…。定义左侧轨道起始点搜索范围[xLs,xLe],右侧轨道起始点搜索范围[xRx,xRe],搜索第Y行,Y始于图像底部。在搜索范围内寻找横向连通区域的中点 xLn∈ {xLs,xLe}和 xRm∈{xRs,xRe},所有的点都被视为可能的起始点。若搜索范围内无起始点,则搜索Y-1行,依次类推,若直至第Ymin行也未能找到起始点,则放弃本侧轨道起始点的搜索;
2)跟踪获取轨道上的其它像素。利用跟踪准则跟踪每一个起始点都可以得到一条轨迹线,这里以xL1为例。设xL1所处的横向连通区域为 [xL1s,xL1e],定义其为跟踪搜索范围的初始值,所处行数为yL1,将此区域延拓为[xL1s-Te,xL1e+Te]作为新一行yL1-1的搜索范围,Te为左右延拓的像素点个数,搜索该区域内若干连通区域的中点xL11,xL12,…,xL1k,这些点都被视为跟踪到的轨迹点。若区域内未能找到轨迹点,则搜索yL1-2行,依次类推,若连续Yrow行未能找到轨迹点,则放弃本条轨迹线的搜索。若在当前行跟踪到了轨迹点,就要确定新一行的跟踪搜索范围。设yL1-1跟踪到了轨迹点,则将xL11所处连通区域的左端点xL11s和xL1k所处连通区域的右端点xL1ke加以延拓作为新的跟踪搜索范围[xL11s-Te,xL1ke+Te],重复此前步骤进行新一行轨迹点的搜索,直至满足限界要求;
3)干扰剔除,从多条轨迹线中选取轨道线。根据大量试验验证,轨道线为提取出的轨迹线中最长最完整的。因此,像素追踪得到的xL1,xL2,…,xLn条轨迹线中像素点个数最多的作为左侧轨道线,像素追踪得到的xR1,xR2,…,xRm条轨迹线中像素点个数最多的作为右侧轨道线;
4)离散点构造轨道方程。利用离散点构建曲线模型的方法很多,本文考虑算法复杂度及实时性要求,采用最小二乘分段二次拟合的方法构造轨道方程。对采集到的左右轨道特征点按搜索顺序分段,每N个点利用最小二乘法进行二次拟合。对于轨道起始点和终止点未能满足限界要求的情况,分别对开始的N个点和最后的N个点利用最小二乘法进行二次拟合并延长直至满足限界要求,N的具体大小视实际情况而定。
本方法能够准确预知轨道线路走向,不受上下坡、弯道等场景的影响,具有较强的抗干扰性,计算量较小,满足实时性的要求。
3 试验结果及分析
试验以英特尔酷睿i7 3.4 GHz计算机为硬件,以vs2010和opencv2.4.4作为软件开发工具按照上述步骤设计算法程序。试验中所用视频全部从苏州高新区有轨电车一号线实地采集得到,图像帧大小为1080*1920,文中给出了部分试验结果。
本文第2节中的图1为原始图像帧,下面以图1为例进行试验分析。对图1进行灰度化,高斯滤波得到预处理后的灰度图,如图5所示。

图5 预处理后的灰度图Fig.5 Gray image after preprocessing
对图5利用第一节的方法进行阈值分割,图6为根据式(1)得到的槽内较暗部分的二值图gL(x,y),图7为根据式(2)得到的槽外较亮部分的二值图gH(x,y),图6和图7经过形态学膨胀后求交集的结果gu(x,y)即为第一节中的图4。

图6 槽内较暗部分二值图Fig.6 Binary image for the dark area

图7 槽外较亮部分二值图Fig.7 Binary image for the bright area
对图4利用第二节的方法进行轨道特征点提取及轨道模型的建立,图8为利用轨道模型划定的轨道之间的感兴趣区域。

图8 轨道之间ROI区域Fig.8 Region of interest between the track
由上述试验结果可知,本文设计的基于多阈值及像素点采用240 MHz时钟,512点排序,只需要8 μs。
5 结束语
排序在雷达信号处理过程中只是其中的一个功能,这要求我们逻辑资源不能消耗太多,而雷达的实时性要求又要求我们必须快速的完成排序。从上述论述可知,单纯的串行和并行排序[6]都不能满足要求,只有本文这种基于FPGA技术的串并行结合处理排序算法才能够满足实际工程要求,达到了实时排序的效果。 该算法具有通用性,可以应用到各种数据快速排序运算领域。
[1]吴顺君,梅晓春.雷达信号处理和数据处理计数[M].北京:电子工业出版社,2004.
[2]周建钦.超快速排序算法[J].计算机工程与应用,2006,42 (29):41-42.
[3]王昌厚.无符号整数按位快速排序算法[J].计算机应用与软件,2006,23(8):120-124.
[4]喝宾.Xinlinx FPGA设计权威指南[M].北京:清华大学出版社,2012.
[5]于斌,米秀杰.ModSim电子系统分析及仿真[M].北京:电子工业出版社,2011.
[6]师延伟,金长江.基于FPGA并行全比较排序算法[J].数字技术与应用,2013(10):126-127.
Tram railway recognition based on multi-threshold and pixel tracking
QIANG Xiang1,ZHANG Zhao-yang2,CHEN Qi-wei2,WU Cheng1,WANG Yi-ming1
(1.School of UrbanRailTranslation,Soochow University,Suzhou 215000,China;2.School of Electronic and Information Engineering,Soochow University,Suzhou 215000,China)
In order to ensure the safety and reliability of the tram operation system,A lot of work need to be done on fast detection of the possible obstacles as well as short time reaction with them.It is widely recognized that the railway recognition is the premise of obstacle detection.This paper brings forward an algorithm for railway recognition based on multi-threshold and pixel tracking,taking the practical characteristics of tram track into consideration.This algorithm segments the track area by applying multi-threshold method,extracts the track feature points adopting pixel tracking method,and selects the appropriate curve model to construct the track equation.This algorithm can effectively identify the straight and curved tracks.
railway recognition;multi-threshold;pixel tracking;connected region
TN911.73
:A
:1674-6236(2015)23-0149-03
2015-02-02稿件编号:201502011
江苏省普通高校研究生科研创新项目(KYLX_1231);2014深圳市城市轨道交通重点实验室开放基金项目(SZ2014001)
强 祥(1991—),男,江苏扬州人,硕士研究生。研究方向:图像处理、智能交通系统。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
天津医科大学学报(2021年1期)2021-01-26
现代电子技术(2021年1期)2021-01-17
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
上海大学学报(自然科学版)(2018年5期)2018-11-02
现代装饰(2018年5期)2018-05-26
电脑知识与技术(2018年35期)2018-02-27
中国三峡(2017年2期)2017-06-09
自动化学报(2017年5期)2017-05-14