
雷达架撤调平机构及其应用研究综述
2015-03-02 06:25芝世磊杨润泽
机电工程 2015年7期
芝世磊,杨润泽
(军械工程学院机械制造教研室,河北石家庄050003)
0 引 言
在国防和民用技术中,常需要通过一定手段将某些设备平台调整到水平状态,以便提高其工作性能,达到特定的指标和要求。
架撤调平机构作为设备调平系统的组成部分,近几年广泛应用于社会生产、生活领域,如起重机、光电设备、压桩机、大型钻机、桥梁检测、地铁、浅海修井平台等。在军工领域,调平机构是雷达车、测控装置、机动发射装置、坦克火控调试台等装备不可缺少的一部分。
作为防空领域里的“千里眼”,雷达装备的工作精度和机动性与调平机构密切相关。雷达机动性是指雷达快速隐蔽或转移阵地的能力,涉及雷达从一个阵地的工作状态,经过拆收、越野行军、进入另一个阵地架设转入工作状态等诸多环节,是雷达使用性能的重要指标。对雷达机动性的要求一般包括:雷达整机的架撤调平时间、操作人员的数量、运输单元的数目、对各种装载运输的要求和阵地的适应性等[1]。现代战争局势瞬息万变,提高地面雷达的机动性是在战争中提高自身生存能力的有效措施之一。因此,对雷达调平设备的研究,不但能有效提高雷达工作效率和质量,而且能够提高雷达装备自身在战争中的生存能力。
本研究对现有的架撤调平机构进行全面回顾和综合分析。
1 架撤调平机构特性分析
调平机构是整个雷达车调平系统的执行元件,一般都以垂直伸缩的方式支撑着车体的重量并完成其升降工作。
雷达车调平系统组成示意图如图1 所示。

图1 雷达车调平系统组成示意图
图1 展示了其支撑调平系统的结构组成,座车通过独立的垂直支撑腿完成架撤和调平。在工作时,控制系统根据检测装置反馈的水平信号,驱动各支腿以一定的方式升降到同一水平线上,从而保证了与支腿接触的车体处于水平状态。
从传动方式来讲,调平机构可分为液压式和机电式两种[2]。
1.1 液压式调平机构
液压式调平机构是靠密封容器内液压油受静压力驱动来传送动力的。在液压系统中,以液压泵或液压马达为动力源,通过控制阀调节具有一定流量和压力的液压油,借助于封闭的缸体使压力能转化为支撑件的机械能,进而驱动支撑腿机构升降,实现工作平台的移动或回转[3]。典型的以液压缸为支撑机构的液压式调平系统图如图2 所示。
该机构在工作时由液压阀控制液压缸执行支撑动作。根据控制阀的不同,一般有电磁换向阀和比例伺服阀两种控制方式,区别在于前者靠电磁换向阀控制,系统控制电流不随平台倾斜程度的变化而变化,调平过程是不连续的;而后者靠比例伺服阀控制,控制电流大小与平台的倾斜变化成正比,调平连续、控制精度高、动作响应快。2010年,南京电子技术研究所的郭洪伟等[4]基于负载敏感技术的调平系统就以电磁换向阀控制,而施勤、岳振兴[5]基于油压检测的雷达调平系统使用比例伺服阀控制。
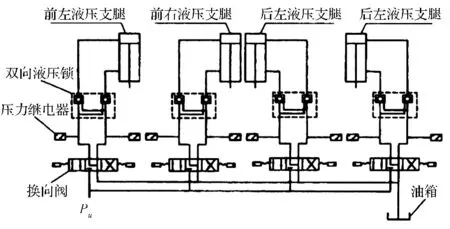
图2 液压式自动调平系统图
根据运动形式的不同,液压缸可分为缸筒固定和活塞杆固定两种形式,在实际应用中根据情况而定。调平油缸的特性分析关乎整个系统的调平精度。为设计更稳定的调平系统,常对工作中的油缸进行力学分析并建立数学仿真模型,常见的仿真软件有Matlab、DSH、流体工作站[6]以及AMESim[7]等。如油缸在开始工作时,活塞杆首先伸出使车轮离地,静平衡时活塞组件主要受到油液的压力和油液黏性摩擦力,受力情况如图3 所示,在各力作用下运动学方程为:

式中:mh—活塞上总质量,kg;vh—活塞的运动速度,m/s;Pin,Pout—油缸进、出油腔的工作压力,Pa;S1,S2—活塞上、下端面的有效面积,m2;b—活塞粘性摩擦系数,N·s·m-1。

图3 活塞组件受力分析
调平机构如何维持支撑体长时间的平衡与稳定是关键,除常有液压马达带抱闸、增加平衡回路和平衡阀之外,为了有效锁紧,还可配合机械锁紧装置,常用的有套筒式、刹片式、内涨式等[8-9]。2013年,郭世军等[10]设计的内涨式机械锁紧液压缸,活塞和缸体之间过盈配合产生锁紧力,很好地实现了锁定与解锁。
液压式调平具有以下优点:①直接利用车体本身携带的发动机作为动力源,大大减少准备时间;②运行过程中可实现大范围的无级调速和无间隙传动,运动平稳[11-12];③采用油作为传动介质,液压元件有自我润滑作用,使用寿命较长;④便于实现自动工作循环和过载保护。
同时,液压式也存在缺点:①液压油本身可压缩,粘滞系数随温度变化,易泄露,易燃,尤其在战时雷达被击中以后可能会发生爆炸;②能量损失大、效率低、发热大;③液压元件加工精度高,造价高;④系统故障难找,检修困难[13]。
1.2 机电式调平机构
机电式调平以电机为驱动,附有电气控制电路及相关运动部件,一般将电机及传动机构合并称为“电气拖动”,电机按控制用途可分为步进电机和伺服电机。机构调平系统框图(以4 腿支撑为例)如图4所示。

图4 机电驱动系统原理图
机电式调平机构以圆筒式垂直升降机构为主,一般由升降套筒和升降驱动机构组成。升降驱动机构位于升降套筒内,承受所支撑平台的垂直载荷,或升降套筒随驱动机构作垂直升降运动。在国外,Alenia 公司生产的RAC 雷达天线升降机构与Ericsson 公司生产的Giraffa 雷达,就运用了圆筒式垂直升降机构。该类机构执行元件主要为螺旋支腿,常见梯形丝杠与滚珠丝杠。以滚珠丝杠为支撑的机电式调平机构示意图如图5 所示。

图5 机电式调平机构示意图
丝杠作为传动执行元件,支撑调平过程稳定、可靠。调平完成后,关键在于保持支撑平台长时间稳定在某一位置,因此要求机构具有锁定功能。对于梯形丝杠来说,其螺纹升角不大于当量摩擦角,一般不需要额外的锁定装置就可实现良好的自锁,支撑体可在行程范围内任意停留且无下沉现象,有效避免了调平系统体积庞大。2014年,李波等[14]设计的雷达天线升降调平机构采用梯形螺纹丝杠,很好地利用了其自锁性。
在具体应用中,可通过自锁原理进行验证。已知自锁条件:

式中:λ—螺纹升角,ρ—当量摩擦角。
已知:

式中:S—螺纹导程,d2—螺纹中经,f—材料摩擦因数,α—螺纹牙形角。
滚珠丝杠的许多性能都优于梯形丝杠,2002年,就有西安电子工程研究所的李忠于以滚珠丝杠作为传动件设计调平装置,充分利用了其传动效率高、承受动载能力强、耐疲劳等特点[15],但自锁性能与传动效率成反比,因其摩擦角一般小于螺旋角,几乎没有自锁。两者在调平机构中应用性能的区别如表1 所示。
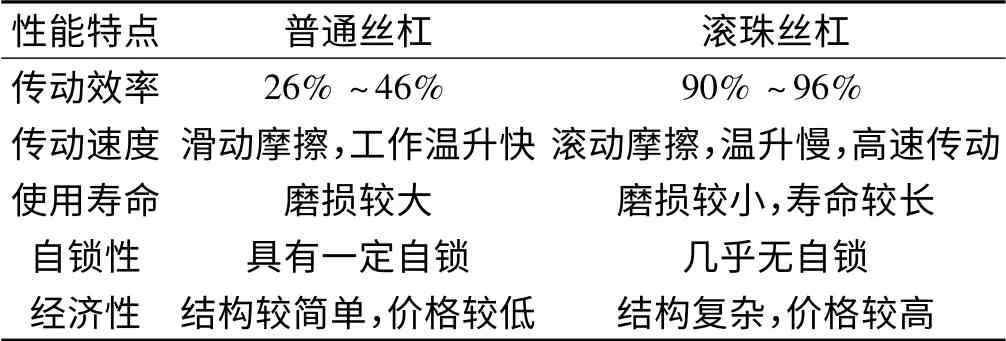
表1 普通丝杠与滚珠丝杠性能比较
针对滚珠丝杠难以自锁的问题,目前有3 种方法解决:
(1)动力元件辅助自锁。使用带抱闸的电机实现锁定控制[16]。
(2)增加机械制动装置。将传动系统中蜗杆、齿轮、轴承等元件设计成自锁[17-18]。
(3)增加超越离合器[19]或电磁离合器[20]。若需要防止双向逆转,可用两个单向超越离合器。使用电磁离合器时,增加一个控制齿轮,当电磁铁断电失效,弹簧压紧控制齿轮,使其无法运动,同时丝杠被卡死。
螺旋支腿作为调平机构的主要优点有:在能自锁的情况下,不需要另加自锁装置;可承载较大载荷,调平过程稳定、可靠、精度高。不足在于调平时间较长,而且如果时间长了,啮合机构内发生锈蚀,将造成操作困难[21-22]。
概括来说,机电式垂直升降机构占据车辆空间较小,便于总体布局,通用性、可移植性好;升降过程速度平稳,相应的控制回路也比较简单。目前在调平装置中使用较多。
2 架撤调平机构的研究现状
上世纪80年代以前,调平机构主要依赖于简单机械,如水平仪、手动螺杆等,调平时通过人眼观察基准水泡或手工调节,而且需要多人协作并反复调整后才能达到一定水平要求,耗时长且精度不高,如原苏联的SA-2 防空导弹发射车和法国响尾蛇主战车的平台调平。该方式调整时间长、精度低,且平台抗倾覆能力差,现在基本上已不再使用。
上世纪80年代以后,借助于液压技术的发展及调平精度要求提高,调平机构布局从最初的三点发展到四点、六点或更多[23],同时出现了液压油缸、千斤顶等支撑结构类型,实现了调平机构在种类和质量上的超越。如在上世纪90年代初,东南大学翟羽健、倪江生[24]按对称矩形方式布置支承油缸,实现了四点支承雷达天线座车的自动电液式调平。上世纪90年代末,西安电子科技大学盛英等[25-26]设计了以阀控液压缸支撑的电液式大吨位六点支撑调平平台,参照Stewart结构,设计了空间的六自由度并联支撑机构。
进入21 世纪,随着计算机和电气控制技术的发展,伺服电机不断应用到调平机构支撑中,同时表现出更优越的性能。近年来,刘春华等设计的水平位置测控调平装置、吴远贵等[27]设计的雷达自动调平装置、李波等设计的雷达天线升降调平机构等,都采用机电式调平机构。机电式调平机构精度高、成本低、工作稳定性好,适宜在恶劣的环境下工作,且维护修理较液压式容易。总之,伺服驱动下的垂直升降式调平机构具有更广泛的应用潜力,也是目前调平应用中的主流趋势。
国外对这方面的研究相对早于国内。1965年,Steward 博士就研究了6 自由度平台的调平问题[28]。在调平机构的种类、机械性能等方面的研究与国内基本一致。不同的是,近年国外主要侧重于控制算法的研究,多结合脉宽调制技术,PID、自适应、神经网络控制等算法,调平时间短,精度和稳定性也高。但由于技术保护,出口到国内产品的精度并不理想[29]。
3 结束语
本研究通过对雷达常用架撤调平机构的阐述和研究,综合比较了它们在结构、工作原理以及应用范围方面的不同与利弊。笔者认为今后调平机构的研究应向以下几个方向发展:
(1)小型化、轻型化。应注重使用新材料和新工艺,优化结构,在提高承载能力的同时更加方便灵活的使用。
(2)模块化、系列化。研究设计独立的模块化调平机构,扩大其应用范围,对推动装备系统模块化、缩短研制周期、降低研制费用、提高可靠性和维修性等方面具有重要的促进作用。
(3)高精度化、高效化。未来调平对核心机构的要求必然随着装备的发展不断提高。采用前沿的数字化技术,实现高精度高性能必是其追求的目标。
[1]Merrill I Skolnik.雷达手册[M].2 版,王军译.北京:电子工业出版社,2003.
[2]李勇建,魏贵玲,邓劲松,等.自动调平技术研究[J].压电与声光,2010,32(6):949-950.
[3]王丽丽,胡小安,伟利国,等.大型开沟铺管机自动控制系统的研制[J].机电工程,2012,29(12):1448-1452.
[4]郭洪伟,彭国朋,黄海涛.雷达天线车负载敏感液压调平系统设计与仿真分析[J]. 电子机械工程,2010,26(5):56-58.
[5]施 勤,岳振兴.基于油压检测的雷达车全自动调平策略[J].现代雷达,2010,32(10):73-76.
[6]李再军.某牵引高炮液压调平油缸动态特性研究[J].四川兵工学报,2010,31(12):28-30.
[7]彭国朋,黄海涛.雷达天线车液压故障分析及其动态仿真[J].火控雷达技术,2009,24(3):43-47.
[8]李世界. 消防车登高平台液压调平系统动态特性分析[J].液压气动与密封,2014(7):55-56.
[9]褚新峰.车载雷达自动调平与举升系统初步研究[D].武汉:华中科技大学机械学院,2007.
[10]郭世军,魏 峰,徐金娟.某车载雷达的调平设计[J].电子世界,2013,17(134):49-52.
[11]盛 英,仇原鹰. 6 腿支撑液压式平台自动调平算法[J].西安电子科技大学学报(自然科学版),2002,29(5):594.
[12]刘春华,王向周,南顺成,等.水平位置测控调平装置研究设计[J].微计算机信息,2005,21(4):58-59.
[13]卢朝双.高精度、机电式车载雷达平台调平控制系统的研发[D]. 成都:电子科技大学机械电子工程学院,2007.
[14]李 波,李志有,曲 颖.某雷达天线升降调平机构设计[J].中国新技术新产品,2014(2):70-71.
[15]李忠于.某雷达自动调平机构的设计分析[J].火控雷达技术,2002,31(3):43-47.
[16]陈 明,王文为,李晖实,等.高炉布料溜槽倾动无抱闸电机的精确控制[J].自动化技术与应用,2009,28(7):97-98.
[17]叶康锋.重/载、高精度平台调平控制系统的研究[D].重庆:重庆大学机械学院,2004.
[18]陆水根,蒋迪永.满滚子径向自锁轴承的设计[J].机电工程,2000,17(6):62-63.
[19]苏凯凯,刘阶萍,王东兴,等.新型波浪发电装置的研究与开发[J].机电工程,2011,28(12):1491-1494.
[20]高利强.单晶炉机械传动系统综述[J].机械传动,2005,29(6):75-76.
[21]周春燕.基于PLC 的自动调平控制系统研制[D].西安:西安电子科技大学机电工程学院,2010.
[22]李广伟,许新芳.机电式自动调平系统[J].兵工自动化,2013(3):6-7.
[23]HAY A M,J A. The determination of nonwoven workspaces of generally constrained planar stewart platforms[J].Computers and Mathematics with Applications,2000(11):1043-1060.
[24]倪江生,翟羽健.雷达天线底车调平问题的研究[J].测控技术,1994,13(4):36-39.
[25]盛 英,仇原鹰. 六点支撑液压式平台自动调平系统[J].液压与气动,1999(4):24-26.
[26]江 涛,朱大昌.2RIT 并联支撑机构动基座的自动调平系统设计[J].机电工程技术,2013(3):40-43.
[27]吴远贵,柳科学,吴志毅,等.某型雷达自动调平系统设计[J].军械维修工程研究,2012,29(3):9-11.
[28]STEWARD D. A platform with six degrees of freedom[J].Proceeding of Institute of Mechanical Engineering,1965,180(15):371-386.
[29]张振伟.机电式车载稳定平台控制器的开发[D].成都:西华大学交通与汽车工程学院,2013.
猜你喜欢
中国民间疗法(2021年5期)2021-06-09
机械工程与自动化(2020年4期)2020-08-25
制造技术与机床(2019年11期)2019-12-04
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
森林工程(2018年4期)2018-08-04
航天工业管理(2017年4期)2017-05-12
火控雷达技术(2016年3期)2016-02-06
深圳职业技术学院学报(2015年5期)2015-11-30
百科探秘·航空航天(2015年4期)2015-11-07
