采用非线性Galerkin方法的柔性梁模型降阶研究
2015-03-07 05:19满兴博伍晓红孙清
西安交通大学学报 2015年7期
满兴博,伍晓红,孙清
(1.西安交通大学土木工程系, 710049, 西安;2.西安交通大学航天航空学院, 710049, 西安)
采用非线性Galerkin方法的柔性梁模型降阶研究
满兴博1,伍晓红2,孙清1
(1.西安交通大学土木工程系, 710049, 西安;2.西安交通大学航天航空学院, 710049, 西安)
针对采用Galerkin方法获取的结构动力学降阶模型精度不高的问题,以考虑几何非线性的两端固支柔性梁作为研究对象,建立了两端固支柔性梁非线性动力学模型。首先采用Galerkin方法将原系统降阶,得到单自由度、三自由度和五自由度系统,再采用非线性Galerkin方法将二自由度和三自由度系统降阶为单自由度系统。通过分析降阶模型的非线性动力学行为,得到系统响应随外荷载幅值变化的分岔图,给出系统做周期运动、倍周期运动和混沌时的时程曲线、相图与庞加莱映射图。在特定频率下,通过改变外荷载幅值来控制系统进出混沌状态。与Galerkin方法得到的降阶模型进行了对比,通过比较进出混沌状态时的外荷载幅值,分析了两种方法的降阶效果。结果表明:非线性Galerkin方法能够有效提高降阶模型的精度,更接近真实模型;采用非线性Galerkin方法降阶得到相同自由度的低阶系统时,原模型阶数越高,得到的低阶模型越精确。
柔性梁;模型降阶;非线性Galerkin方法;非线性动力学行为;分岔
近年来,机械工程领域中机器人及各种操作手向着高速、精密、轻量化的方向发展,非线性机械臂的振动控制日益受到重视[1-4];在航天领域,由于太空中几乎不存在空气阻力,由超薄超轻材料制造的天线和太阳能电池板等结构一旦开始振动,将持续很长时间,航天器结构的振动控制问题急需解决[5-7];在土木工程中,工程结构的尺度越来越大,例如超高层建筑、大跨度桥梁等,结构自身表现出明显的几何非线性,由风载及地震引起的结构振动问题日益突出[8-10]。
由于实际的结构是一个无限维、模态密集的空间分布系统,如果想要控制结构的振动,须采用有效的降阶方法来获取阶数较低、有足够精度的模型,在此基础上进行控制方法的设计。因此,对实际结构进行模型降阶就成为一个关键问题,这一问题为建立结构仿真模型和进行结构振动控制带来了困难。
研究非线性动力系统时常采用的模型降阶方法有中心流形方法[11-12]、Lyapunov-Schmidt(L-S)方法[11-13]、非线性Galerkin方法[14-15]和本征正交分解技术(POD)[16]等,其中中心流形方法和L-S方法通常仅适用于局部平衡点附近问题的降阶,在实际应用中有局限性。POD技术是一种线性处理方法,有如下问题:①过高估计系统的阶数;②不能提供变量之间的非线性关系;③依赖于已有数据,对于同一系统的不同状态信号可能构造出不同的系统。
非线性Galerkin方法是在Galerkin方法的基础上发展起来的。在Galerkin方法中,高维或无穷维动力系统被投影到由假设模态所构成的子空间中,这些假设模态通常是线性算子的特征值对应的特征向量,在传统的Galerkin方法中通常是根据经验直接截断获得,不考虑高阶分量的影响。但是,这种直接截断的方法有不足之处,忽略了高阶分量对结构的影响,对非线性系统可能得出错误的结论。为了改进Galerkin方法,根据近似惯性流形的构造思想,Marion和Temam提出了非线性Galerkin方法,该方法的核心之处在于:采用低阶分量描述原系统的同时考虑了高阶分量的影响,从而有较高的精度和收敛速度。
本文以考虑几何非线性的两端固支柔性梁作为研究对象,建立了两端固支柔性梁非线性动力学模型,并采用非线性Galerkin方法对所建立的模型进行降阶。与Galerkin方法得到的低阶模型结果进行了对比,通过比较进入混沌时的外荷载幅值,分析两种方法的降阶效果。结果表明,基于非线性Galerkin方法得到的低阶模型比Galerkin方法得到的低阶模型更接近真实结构。
1 柔性梁模型的建立
本文研究对象为伯努利-欧拉梁,建模时考虑变形过程中轴向应变引起的轴向力对系统刚度的影响,即考虑了系统的几何非线性。柔性梁模型如图1所示。
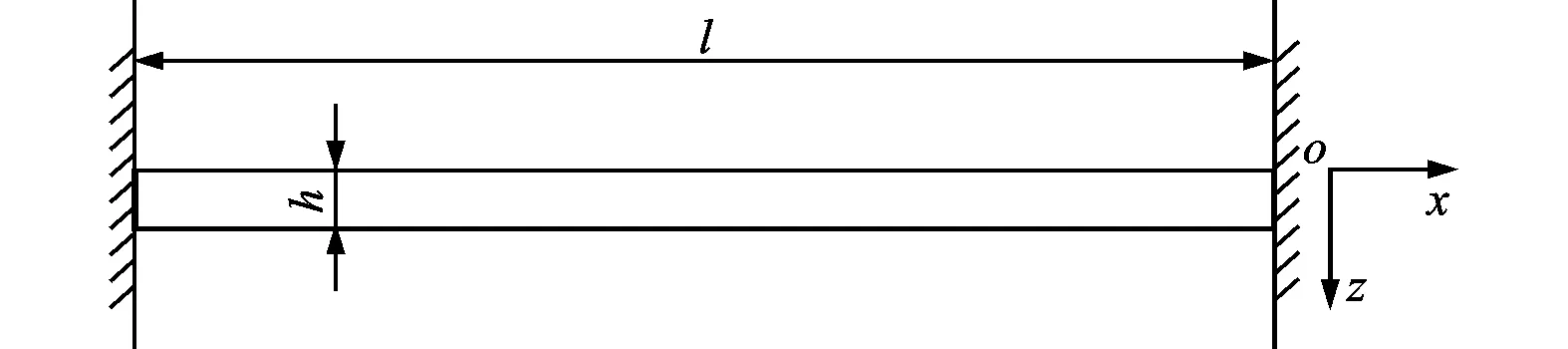
图1 两端固支柔性梁示意图
当梁沿轴线受一均布力f(x,t)时,沿轴线截取一微元dx,受力分析如图2所示。
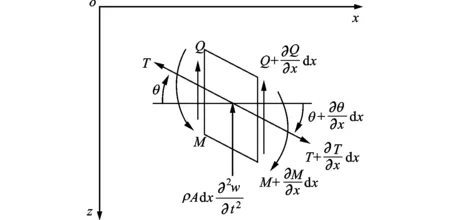
图2 微元受力分析图
根据达朗贝尔原理,可得微元在z方向的动力学平衡方程
(1)
式(1)可简化为
(2)
对于两端固支梁,边界条件为
(3)
2 基于非线性Galerkin方法的模型降阶

(4)

令
(5)
将式(4)两端乘以φn(x),再将式(5)代入式(4),方程两端从x=0到x=1积分,可得
(6)

传统Galerkin方法通常对式(6)直接进行模态截断,不考虑高阶分量的影响,从而得低阶模型。例如,想得到单自由度系统,直接令m=1,n=1得
(7)
非线性Galerkin方法得到的单自由度系统不但包含低阶分量,同时也需考虑高阶分量的影响。考虑梁的中点有一正弦激励的情形,一般认为这种情况下响应中不会有反对称模态存在。如取高阶分量为2阶模态,即m=3,当n分别取1、3时得到二自由度微分方程组,再考虑模态的对称性,有
(8)
(9)
下面采用非线性Galerkin方法得到反映u3与u1关系的近似惯性流形。
构造近似惯性流形常用的方法有不动点法和隐式欧拉解法,由于不动点法方便数值求解,因此本文采用不动点法求解近似惯性流形。

(10)
由于u3为小量,忽略二阶及以上无穷小,得到反映u3与u1关系的近似惯性流形,即
(11)
再将u3代入式(8),得到降阶系统
(12)
故得到式(2)的近似解为
(13)
3 柔性梁非线性动力学行为分析

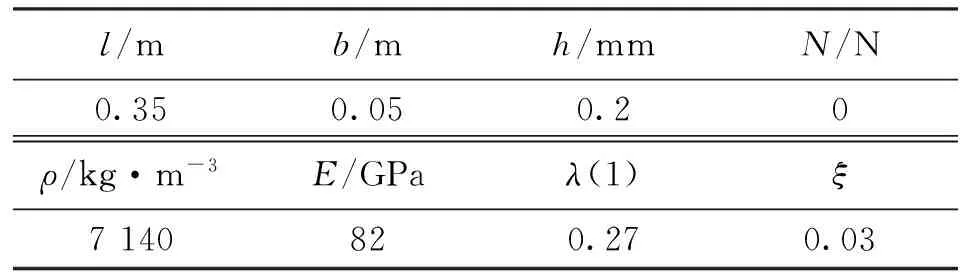
表1 柔性梁参数
梁在中点处受到正弦激励,f(t)=Psinωt,外荷载幅值为P,外荷载频率ω=35 rad/s。计算不同外荷载幅值P下柔性梁l/4处的响应,可得到l/4处位移随P变化的分岔图,如图3a所示,P取值0≤P≤20 N。为了清楚显示,图3b为P取值4 N≤P≤6 N的分岔图。

(a)0≤P≤20 N

(b)4 N≤P≤6 N图3 P为变量的分岔图
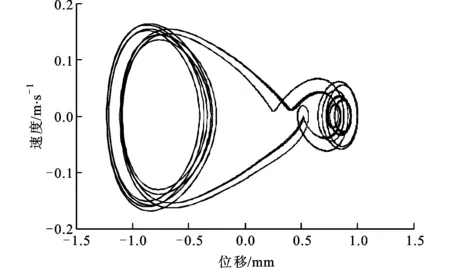
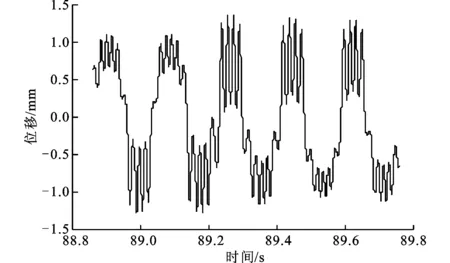
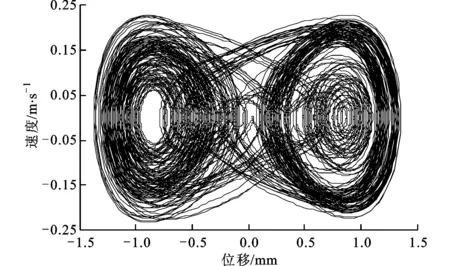
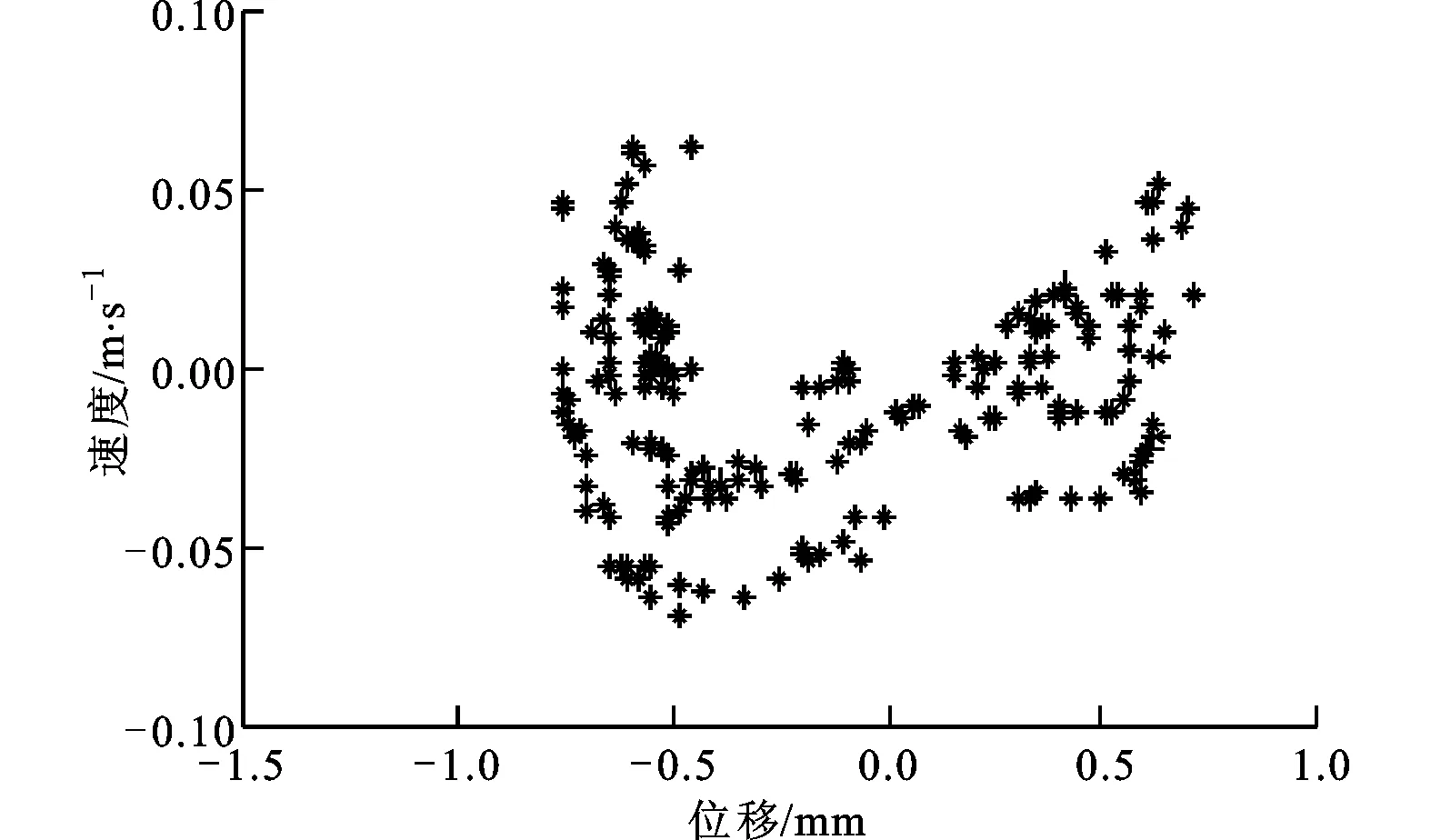
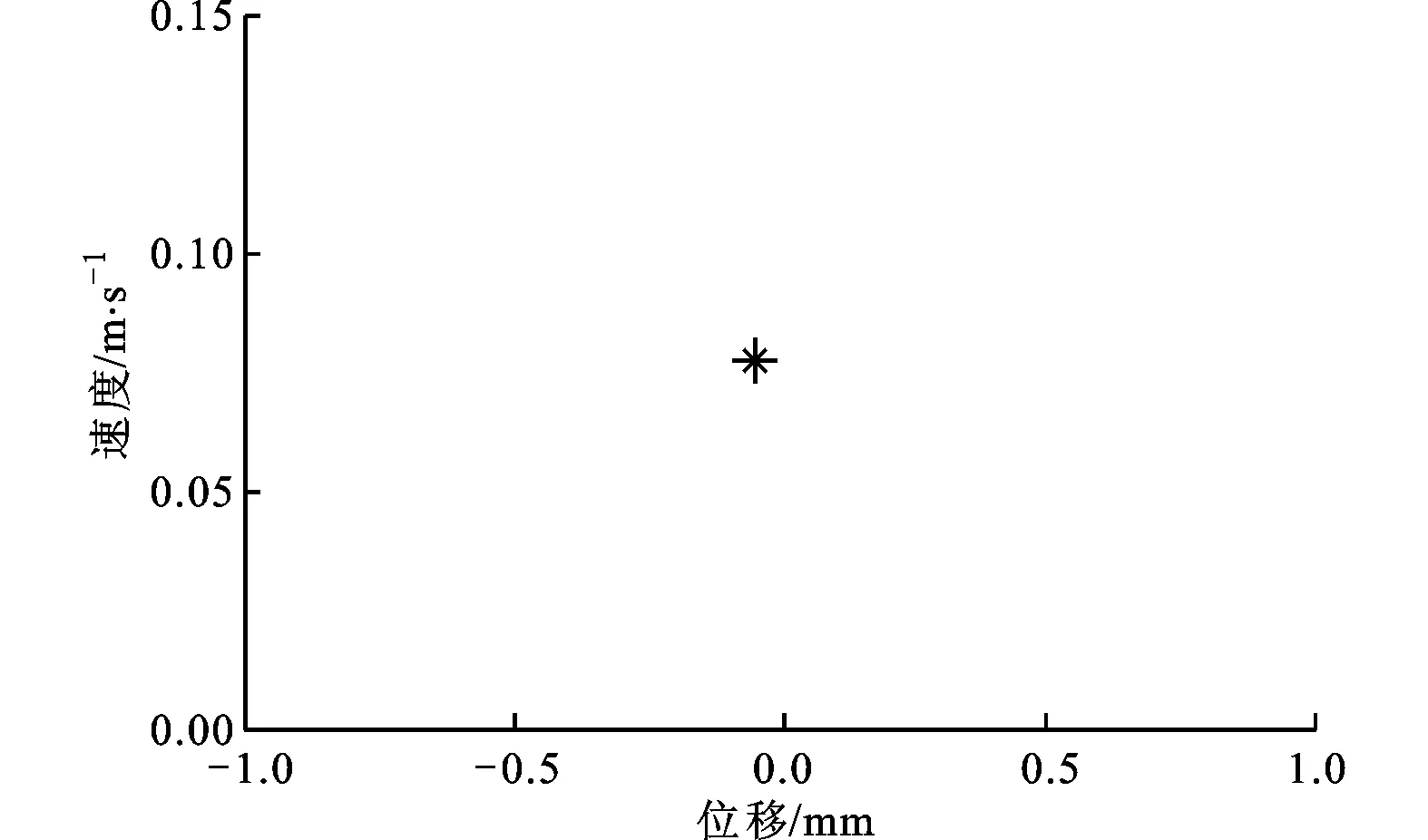
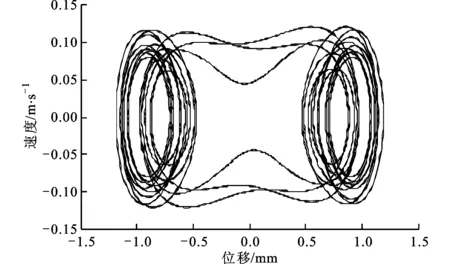
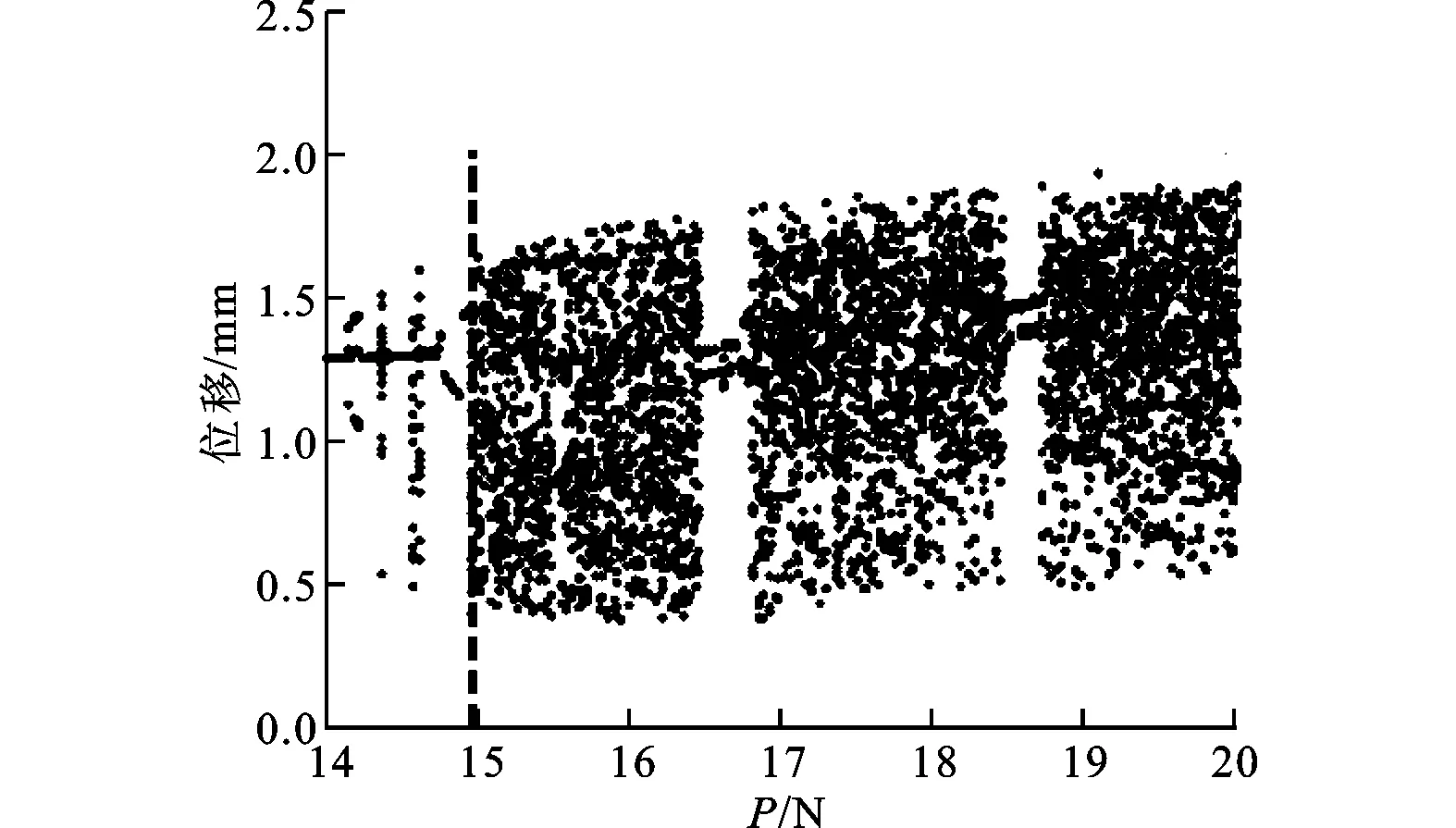
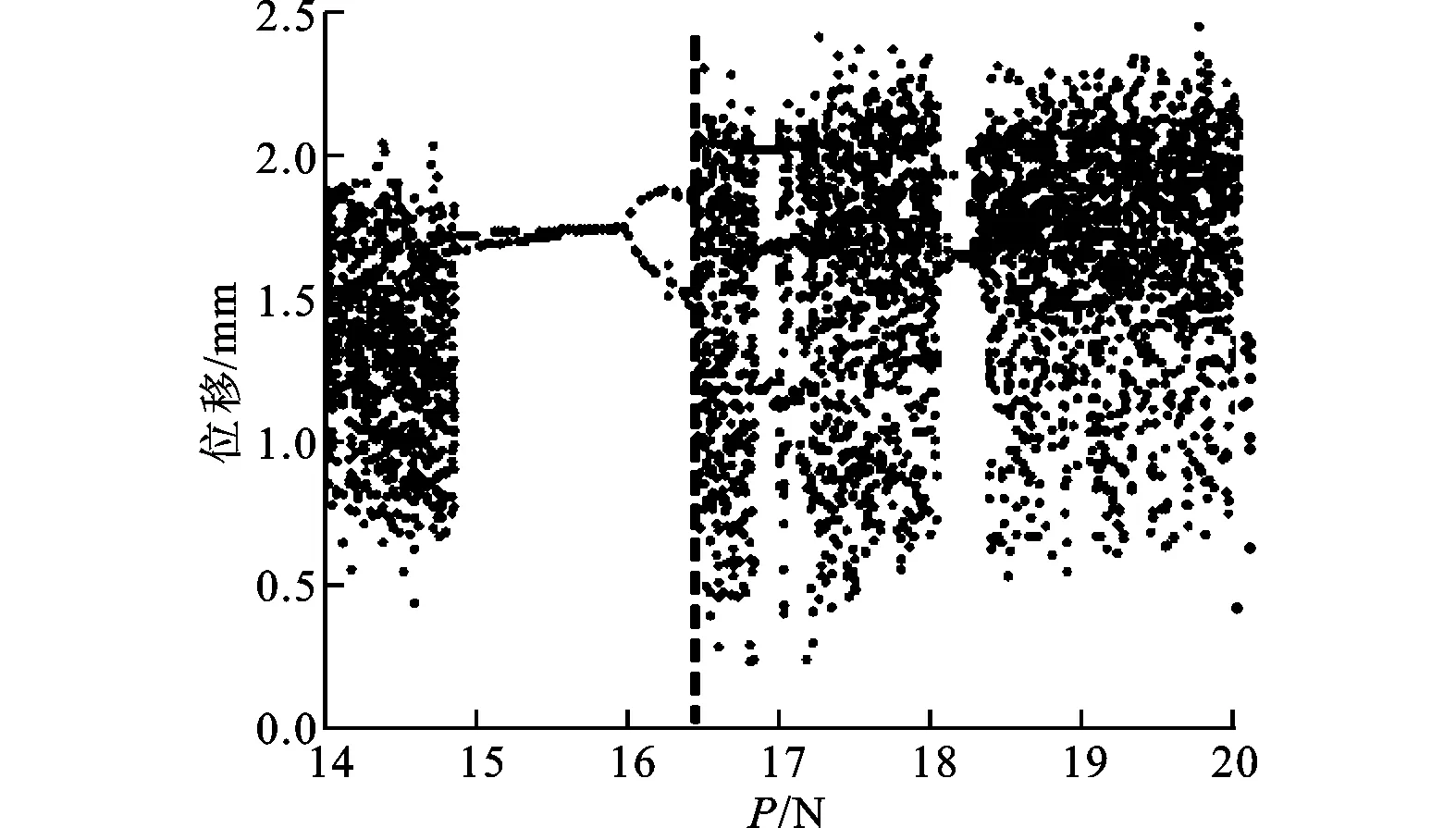
从图3b可以看出,在4 N≤P≤4.32 N时系统进行混沌运动;当4.32 N (a)时程响应曲线 (b)相平面图 (c)庞加莱截面图4 2倍周期运动(P=4.46 N) (a)时程响应曲线 (b)相平面图 (c)庞加莱截面图图5 混沌运动(P=5 N) (a)时程响应曲线 (b)相平面图 (c)庞加莱截面图图6 周期运动(P=5.3 N) (a)时程响应曲线 (b)相平面图 (c)庞加莱截面图7 3倍周期运动(P=5.46 N) 当P=4.46 N时,系统响应如图4所示。由图4c可以看出,庞加莱截面中有2个映射点,系统做2倍周期运动。当P=5 N时,系统响应如图5所示。由图5c可以看出,庞加莱截面上出现了一些不规则的点,而这些点又满足一定的分布规律,系统做混沌运动。当P=5.3 N时,系统响应如图6所示。由图6c可以看出,庞加莱截面中只有1个映射点,系统做周期运动。当P=5.46 N时,系统响应如图7所示。由图7c可以看出,庞加莱截面中有3个映射点,系统做3倍周期运动。 首先,采用Galerkin方法将原系统降阶,得到单自由度系统、三自由度系统、五自由度系统。在此基础上,采用非线性Galerkin方法将二自由度系统和三自由度系统降阶为单自由度系统。然后,分析各系统的非线性动力学行为,与Galerkin方法得到的低阶模型进行对比,比较两种方法的降阶效果。 分别计算不同系统随幅值P变化的分岔图,结果如图8所示,图中垂线为系统进入混沌运动时的外荷载幅值。 如表2所示,比较各系统进入混沌运动时的外荷载幅值,并视Galerkin方法五自由度系统为精确解,可得各系统的降阶效果。 表2 各系统进入混沌时的外荷载幅值及误差 由表2可以看出,对于同为一阶的降阶系统,采用非线性Galerkin方法得到的单自由度系统比采用Galerkin方法得到的单自由度系统拥有更高的精度,更接近真实模型。 另外,同样采用非线性Galerkin方法降阶,由三自由度系统降阶得到的单自由度系统比由二自由度系统降阶得到的单自由度系统拥有更高的精度。 (a)Galerkin方法单自由度系统 (b)Galerkin方法三自由度系统 (c)Galerkin方法五自由度系统 (d)二自由度降为单自由度系统 (e)三自由度降为单自由度系统图8 各系统随外荷载幅值P变化的分岔图 本文采用非线性Galerkin方法对所建立的两端固支柔性梁模型进行降阶,并分析了降阶模型的非线性动力学行为,得到系统响应随外荷载幅值变化的分岔图。与Galerkin方法得到的低阶模型进行对比,通过比较进出混沌状态时的外荷载幅值,分析了两种方法的降阶效果,得到如下结论。 (1)在特定频率下,随着外荷载幅值的变化,系统分别进行周期运动、拟周期运动、混沌运动,因此可以通过改变外荷载幅值来控制系统进、出混沌状态。 (2)采用非线性Galerkin方法得到的降阶模型考虑了高阶分量的影响,比采用Galerkin方法得到的降阶模型拥有更高的精度,更接近真实模型。 (3)采用非线性Galerkin方法降阶得到相同自由度的低阶系统时,原模型阶数越高,得到的低阶模型越精确。 [1] CASTRI C D, MESSINA A. Exact modeling for control of flexible manipulators [J]. Journal of Vibration and Control, 2012, 18(10): 1526-1551. [2] QIU Z, WANG B, ZHANG X, et al. Direct adaptive fuzzy control of a translating piezoelectric flexible manipulator driven by a pneumatic rodless cylinder [J]. Mechanical Systems and Signal Processing, 2013, 36(2): 290-316. [3] KHAIRUDIN M, MOHAMED Z, HUSAIN A R. Dynamic model and robust control of flexible link robot manipulator [J]. Telkomnika Telecommunication, Computing, Electronics and Control, 2013, 9(2): 279-286. [4] ABDULLAHI A M, MOHAMED Z, MUHAMMAD M. A PD-type fuzzy logic control approach for vibration control of a single-link flexible manipulator [J]. International Journal of Research in Engineering and Science, 2013, 1(4): 37-47. [5] FENG Z, ZHANG Q, TANG Q, et al. Control-structure integrated multiobjective design for flexible spacecraft using MOEA/D [J]. Structural and Multidisciplinary Optimization, 2014, 50(2): 347-362. [6] SALES T P, RADE D A, DE SOUZA L C G. Passive vibration control of flexible spacecraft using shunted piezoelectric transducers [J]. Aerospace Science and Technology, 2013, 29(1): 403-412. [7] XU W, MENG D, CHEN Y, et al. Dynamics modeling and analysis of a flexible-base space robot for capturing large flexible spacecraft [J]. Multibody System Dynamics, 2014, 32(3): 357-401. [8] ZEMP R, de LLERA LA J C, ALMAZN J L. Tall building vibration control using a TM-MR damper assembly [J]. Earthquake Engineering & Structural Dynamics, 2011, 40(3): 339-354. [9] XING C, WANG H, LI A, et al. Study on wind-induced vibration control of a long-span cable-stayed bridge using TMD-type counterweight [J]. Journal of Bridge Engineering, 2013, 19(1): 141-148. [10]MASHNAD M, JONES N P. A model for vortex-induced vibration analysis of long-span bridges [J]. Journal of Wind Engineering and Industrial Aerodynamics, 2014(134): 96-108. [11]CHEN Y, LEUNG A Y T. Bifurcation and chaos in engineering [M]. Berlin, Germany: Springer, 1998. [12]陈予恕. 非线性动力学系统的分岔和混沌理论 [M]. 北京: 高等教育出版社, 1993. [13]陈启韶. 分岔与奇异性 [M]. 上海: 上海科技教育出版社, 1995. [14]MARION M, TEMAM R. Nonlinear Galerkin methods [J]. SIAM Journal on Numerical Analysis, 1989, 26(5): 1139-1157. [15]DAI H H, PAIK J K, ATLURI S N. The global nonlinear Galerkin method for the analysis of elastic large deflections of plates under combined loads: a scalar homotopy method for the direct solution of nonlinear algebraic equations [J]. Computers Materials and Continua, 2011, 23(1): 69-99. [16]XIE D, XU M, DOWELL E H. Proper orthogonal decomposition reduced-order model for nonlinear aeroelastic oscillations [J]. AIAA Journal, 2014, 52(2): 229-241. (编辑 赵炜) Study on the Model Order Reduction of Flexible Beam Based on Nonlinear Galerkin Method MAN Xingbo1,WU Xiaohong2,SUN Qing1 (1. Department of Civil Engineering, Xi’an Jiaotong University, Xi’an 710049, China;2. School of Aerospace, Xi’an Jiaotong University, Xi’an 710049, China) A nonlinear dynamics model of a flexible beam clamped at both ends is established, and the order of the model is reduced using nonlinear Galerkin method to solve the problem of low accuracy using common Galerkin method. On this basis, the nonlinear dynamical behaviors of the reduced-order model are analyzed, and the bifurcation diagram of system response is obtained when the external load amplitude changes. The time-displacement curves, phase diagrams and Poincare maps are drawn when the system is put in periodic motion, quasi-periodic motion and chaotic motion. Experimental results show that the reduced-order model using nonlinear Galerkin method has higher accuracy than common Galerkin method, especially when the original model has a relatively high order. flexible beam; order reduction; nonlinear Galerkin method; nonlinear dynamic behavior; bifurcation 2014-12-29。 满兴博(1992—),男,硕士生;孙清(通信作者),男,教授,博士生导师。 国家自然科学基金资助项目(11172226)。 时间:2015-04-22 10.7652/xjtuxb201507019 TH117.5 A 0253-987X(2015)07-0113-07 网络出版地址:http:∥www.cnki.net/kcms/detail/61.1069.T.20150422.1444.002.html





4 降阶系统非线性动力学行为对比分析




5 结 论
猜你喜欢
振动与冲击(2022年10期)2022-05-30
应用数学(2020年4期)2020-12-28
应用数学(2020年4期)2020-12-28
矿产勘查(2020年11期)2020-12-25
机械制造与自动化(2020年3期)2020-07-16
液压与气动(2020年4期)2020-04-10
数学物理学报(2019年3期)2019-07-23
电子制作(2017年7期)2017-06-05
中国煤层气(2015年3期)2015-08-22
空间控制技术与应用(2015年3期)2015-06-05