
卡尔曼滤波抗积分饱和PDF控制系统研究
2015-03-09 02:12ResearchonKalmanFilteringAntiintegralSaturationPDFControlSystem
自动化仪表 2015年2期
Research on Kalman Filtering Anti-integral Saturation PDF Control System
鄢华林 祁圣民
(江苏科技大学机械工程学院,江苏 镇江 212003)
卡尔曼滤波抗积分饱和PDF控制系统研究
Research on Kalman Filtering Anti-integral Saturation PDF Control System
鄢华林祁圣民
(江苏科技大学机械工程学院,江苏 镇江212003)
摘要:针对非接触式登船梯控制系统在实际工作中不可避免地受到干扰信号的影响这一问题,提出了卡尔曼滤波抗积分饱和PDF控制系统。该控制系统主要由PDF控制器、抗积分饱和控制器和卡尔曼滤波器三个部分组成。卡尔曼滤波抗积分饱和PDF控制系统具有优良的控制性能和动态品质。该控制系统能快速跟踪设定的参考信号且无超调与振荡出现,同时能抑制白噪声的污染。仿真结果表明,该控制系统提高了系统的自适应与鲁棒性。
关键词:伪微分控制PDF抗积分饱和卡尔曼滤波Matlab仿真
Abstract:In practical operation, the non-contact control system of boarding ladder is inevitably affected by interference signals, the design of Kalman filtering anti-integral saturation PDF control system is proposed. This control system mainly consists of three parts, i.e., PDF controller, anti-integral saturation controller and Kalman filter. This control system possesses excellent control performance and dynamic quality, it can fast track the reference signal without overshoot or oscillation, and white noise pollution can be restrained. The result of simulation indicates that the control system improves the robustness and adaptation of the system.
Keywords:Pseudo-differential controlPseudo-derivative feedback(PDF)Anti-integral saturationKalman filteringMatlab simulation
0引言
非接触登船梯是一个复杂的多输入多输出非线性系统,使用常规的控制算法如PI和PID,实现上虽然非常简单方便,但难以保证登船梯具有良好的动态和静态品质。为了提高非接触式登船梯跟踪性能,采用抗积分饱和伪微分反馈控制(pseudo-derivative-feedback,PDF)算法。此算法自适应能力强,且对被控对象的数学模型精度要求不是很高,参数整定方便。
由于海上的工作环境比较恶劣,非接触式登船梯工作中经常受到干扰信号的影响,导致其信号中常含有高频干扰,使得控制品质下降。为了获取需要的信号,需要对控制信号与反馈信号进行滤波处理。卡尔曼滤波作为一种重要的最优估计理论被广泛应用于导航、控制、目标跟踪等领域[1]。本文主要对存在控制过程噪声与测量噪声时的控制问题进行了研究。
1卡尔曼滤波抗积分饱和PDF算法
1.1 PDF算法简介
PDF控制算法是微分反馈控制算法的改进算法,微分反馈算法在前向通道中只有积分运算,如果被控系统的阶次为n,则整个控制系统将会变成(n+1)次。从稳定性与可控性的角度来考虑,对n阶被控系统,必须提供被控变量的n阶微分。在仿真试验中微分的实现很容易,但是在工程上高阶微分很难实现,而且微分作用会增强信号中的噪声。为了降低微分对噪声信号的放大,又不影响微分的功效,对微分反馈进行了改进,如图1与图2所示。

图1 微分反馈控制算法
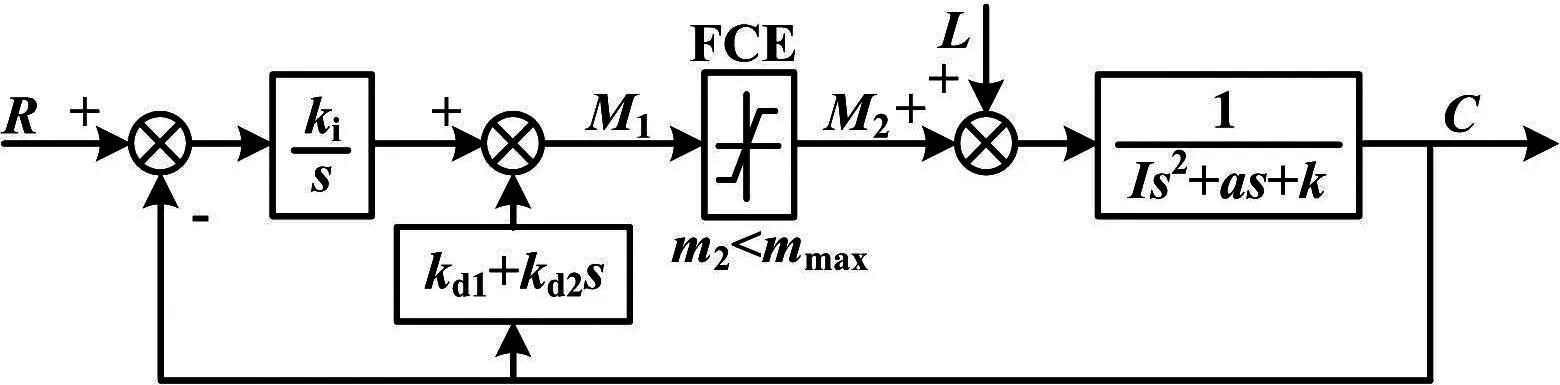
图2 伪微分控制算法
从图1可以看出,对于二阶被控系统,输出信号C的微分的积分仍然是C,所以没有必要对C进行微分运算后再进行积分运算,且工程上应尽量避免微分运算。从图2可以看出,M1(t)的值与图1中是相同的,也就是两种算法实际上在控制量的输出上是等效的。
(1)
PDF控制算法实际微分比微分反馈算法要低一阶,这样既保证了良好的控制效果,又降低了微分对噪声的放大,对控制品质的提高起到了很好的作用。
1.2 抗积分饱和
积分饱和是指系统存在一个方向的偏差,控制器输出由于积分作用的不断累积而加大,从而导致末级放大器(final control element,FCE)达到工作极限mmax。以液压阀门为例,此时阀的开度最大,如图3所示,这时如果输入值u(k)继续增大,阀门的开度不能再增大,控制器输出的控制量超过末级放大器的正常运行范围进入饱和区。当系统出现反向偏差时,控制量逐渐减小,进入饱和区的程度越深,退出时需要的时间越长,这时就会出现超调增大的现象,使控制性能恶化。
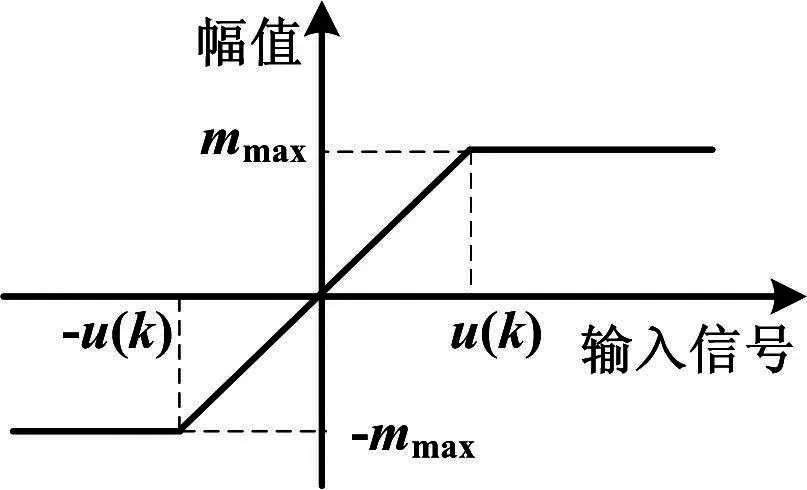
图3 末级放大器工作示意图
防止积分饱和的方法就是抗积分饱和。该方法的思路是监视控制器输出的控制量,如果控制量超过了FCE的极限值mmax,则累加负偏差;如果超过了FCE的极限值-mmax,则累加正偏差。
在PDF算法中引入抗积分饱和可以摆脱FCE对PDF参数的限制,扩大参数的整定范围,使得参数的整定更为方便。引入抗积分饱和后PDF算法在整定时只要满足等极点原则即可。以二阶被控对象(图2)为例,参数整定为:

(2)

(3)
1.3 卡尔曼滤波
对于线性离散系统来说,离散状态方程如下:
x(k)=Ax(k-1)+B[u(k)+w(k)]
(4)
yv(k)=Cx(k-1)+v(k)
(5)
式中:x(k)为k时刻的系统状态;u(k)为k时刻对系统的控制量;A和B为系统参数,对于多模型系统,它们为矩阵,主要由被控对象的数学模型来决定;yv(k)为k时刻的测量值,这个测量值里包含有干扰噪声;C为测量系统的参数,对于多测量系统,C为矩阵;w(k)和v(k)分别为过程噪声和测量噪声,它们被假设成高斯白噪声,它们的协方差分别为Q、R。
首先,初始化X(k)以及X(k)对应的协方差P(k),同时对Q、R进行初始化,初始化之后根据X(k)与P(k)的值计算卡尔曼增益Mn(k)。Mn(k)计算公式如下。

(6)
计算完卡尔曼增益之后,接下来计算的是X(k)对应的协方差P(k),计算公式如下。
问题3:定理的逆命题,即“若函数y=f(x)在区间[a,b]上的图象是一条不间断的曲线,且函数y=f(x)在区间(a,b)上有零点,则f(a)·f(b)<0”成立吗?
P(k|k-1)=AP(k-1|k-1)AT+BQBT
(7)
P(k)=[In-Mn(k)C]P(k|k-1)
(8)
式中:P(k-1|k-1)为X(k-1)状态时对应的协方差;P(k)为X(k)状态对应的协方差。
更新下一个状态,即由X(k-1)来更新X(k),更新公式如下。
x(k)=Ax(k-1)+Mn(k)[yv(k)-CAx(k-1)]
(9)
由更新的状态X(k)来计算滤波过后的输出值,输出公式为:
ye(k)=Cx(k)
(10)
2系统结构及仿真
2.1 系统结构
基于卡尔曼滤波的抗积分饱和PDF控制系统结构如图4所示。

图4 卡尔曼滤波抗积分饱和PDF算法
图4中,w(t)为控制干扰信号(或称过程信号),v(t)为测量干扰信号,yv为某个时刻受到噪声污染后的输出信号,ye为经过卡尔曼滤波之后的输出信号。
2.2 仿真试验
以非接触式登船梯做轴向旋转补偿波浪为例进行研究,用系统辨识的方法获取研究对象的数学模型:
(11)
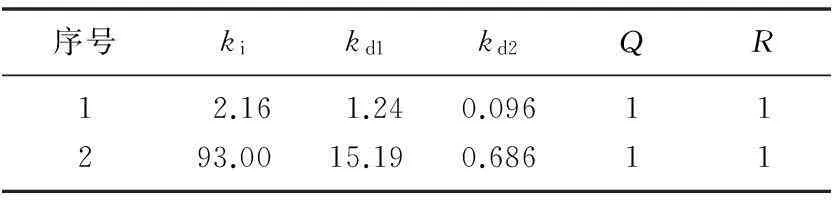
此数学模型实际上是直流电机的位置控制模型,通过直流电机的位置控制对波浪的波动进行补偿。对其进行离散化,并将其描述成离散状态方程,求出A、B、C、D四个矩阵的值。根据等极点原理,由式(2)、式(3)算出两组仿真参数,仿真参数如表1所示。
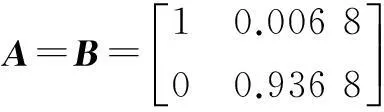
(12)

(13)

(14)
w(t)控制干扰信号与v(t)测量干扰信号均为幅值为2的高斯白噪声,两个干扰信号的协方差值如表1所示都为1。给系统加上一个阶跃信号,信号大小为50°,即让电机转50°,阶跃响应仿真结果如图5所示。
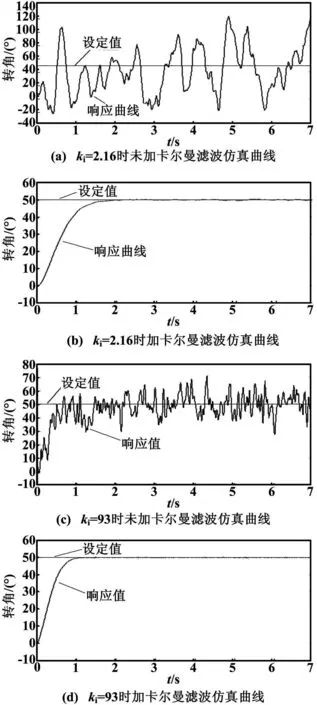
图5 阶跃信号仿真曲线
从仿真的结果可以看出,基于卡尔曼滤波的抗积分饱和PDF控制算法,能有效抵抗强干扰信号的影响,充分发挥了抗积分饱和PDF算法响应快、无超调的控制性能。
为了查看基于卡尔曼滤波抗积分饱和PDF算法的跟踪性能,给系统加上正弦信号,信号的幅值为50°,角频率为0.1,跟随特性仿真结果如图6所示。
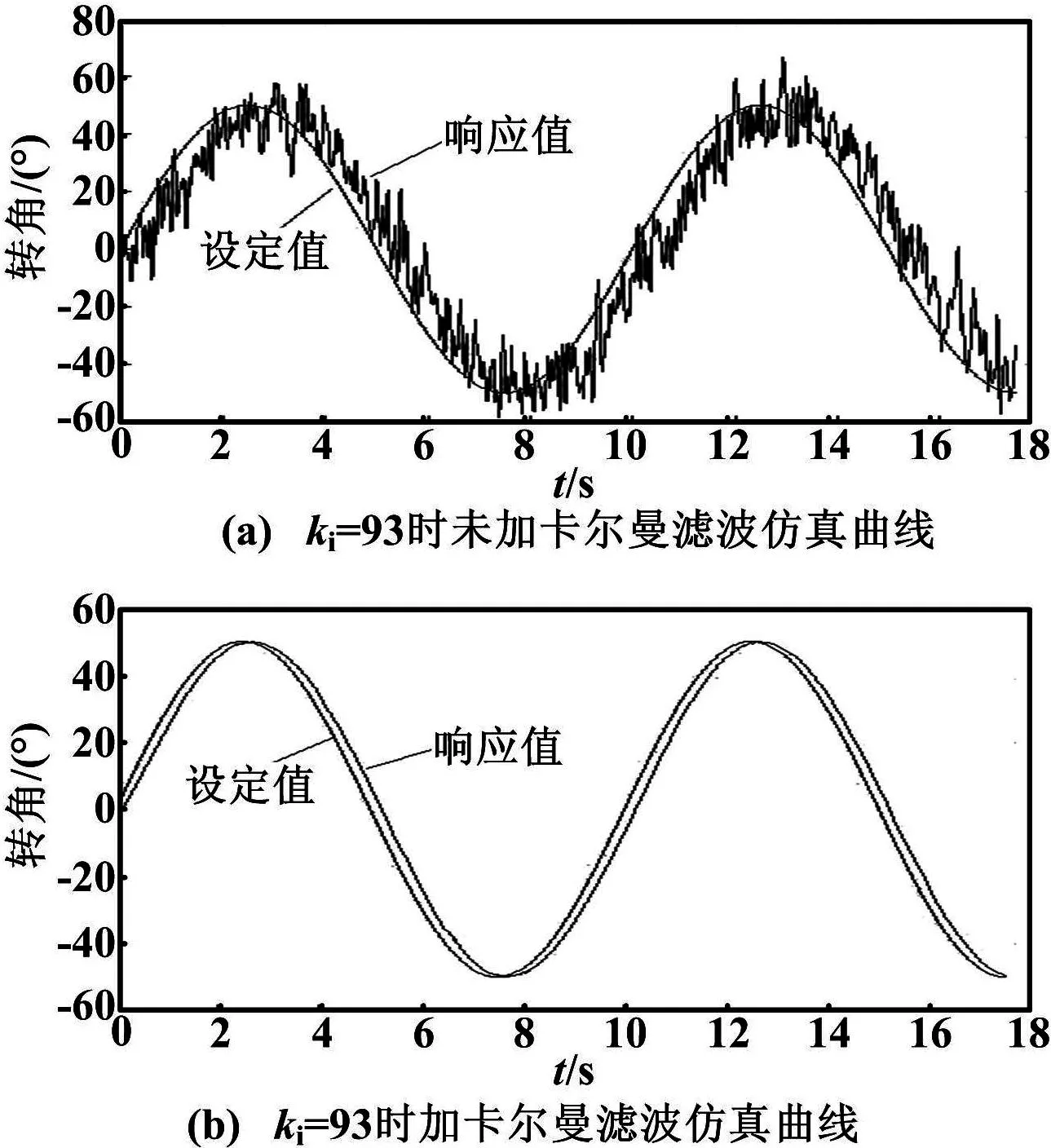
图6 跟随信号仿真曲线
从仿真的结果可以看出,基于卡尔曼滤波抗积分饱和PDF算法的跟随特性良好,能有效抵抗噪声的干扰,实现信号的快速跟踪。
3结束语
仿真表明,卡尔曼滤波抗积分饱和PDF算法在较大的随机噪声干扰下仍然能够快速响应目标,抑制噪声的干扰,保证控制器保持良好的控制品质。该控制算法实现简单,有着广阔的应用前景。
参考文献
[1] 秦永元.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社,2004.
[2] 张志利,张维胜.卡尔曼滤波在温度监控系统中的应用[J].传感器世界,1999,5(10):20-22.
[3] 潘志扬,潘俊民.基于Kalman滤波的无位置传感器感应电机伺服系统的研究[J].电气传动,2002,32(4):13-16.
[4] 辛菁,刘丁,班建安.自适应卡尔曼滤波器在机器人控制中的应用[J].西安理工大学学报,2007,23(2):136-139.
[5] 刘立生,杨宇航.基于离散小波变换和Kalman滤波的直升机主减智能状态预测[J].振动与冲击,2012,31(17):159-164.
[6] Phelan R M.Automatic control system[M].New York:Cornell University Press,1977.
[7] 王学斌,徐建宏,张章.卡尔曼滤波器参数分析与应用方法研究[J].计算机应用与软件,2012,29(6):212-215.
[8] 张鹏杰,邱卫宁,侯贺平,等.总体最小二乘求取AR(1)模型参数[J].测绘信息与工程,2012,37(3):1-2,8.
[9] 刘惟锦,章毓晋.基于Kalman滤波和边缘直方图的实时目标跟踪[J].清华大学学报:自然科学版,2008,48(7):1104-1107.
[10]刘和平.数字信号处理器原理、结构及应用基础[M].北京:机械工业出版社,2006:1-15.
中图分类号:TP13
文献标志码:A
DOI:10.16086/j.cnki.issn1000-0380.201502002
修改稿收到日期:2014-06-20。
第一作者鄢华林(1957-),男,1980年毕业于江苏大学机械工程专业,获学士学位,教授;主要从事电液伺服控制、海洋装备、系留装置的研究。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
计算技术与自动化(2022年2期)2022-07-04
黑龙江大学自然科学学报(2022年1期)2022-03-29
海军航空大学学报(2021年1期)2021-09-01
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年2期)2021-06-09
通信电源技术(2020年22期)2020-03-27
计算机应用与软件(2019年2期)2019-04-01
统计与决策(2018年5期)2018-04-08
雷达学报(2017年3期)2018-01-19
